
火星着陆地形信息融合分析技术
2010-06-11 01:54付丽璋吴世通王海涛
航天返回与遥感 2010年1期
付丽璋 吴世通 王海涛
(北京空间机电研究所,北京100076)
1 引言
目前,美国主要是通过分析火星轨道探测器发回的火星表面图像,综合考虑工程和科学标准,来预先选定着陆器的着陆点。由于目前的火星探测着陆器无自主机动的能力、着陆精度的要求也不高,所以一般选择平坦的火星表面作为着陆点。随着火星探测技术的发展,特别是满足将来在地形复杂区域进行科学研究和取样的需求,这就要求着陆器具有对地形进行实时探测和分析的能力。
通过分析与着陆安全有关的实际工程指标,在着陆过程中所需提取的与着陆安全有关的地形特性信息主要有:1)粗糙度:在粗糙的火星表面着陆,可能会导致其着陆支架的折断。2)坡度:坡度大于所要求的角度时,会导致着陆器不能稳定着陆甚至着陆器倾覆。3)其他危险物:如石头、陨石坑等。在石头密集或陨石坑坡度较大的区域着陆,也有可能造成任务的失败[1]。
为了分析着陆点地形是否适合着陆,必须获得着陆点的原始地形数据,现在主要用无源敏感器(CCD/CMOS相机)或有源敏感器(激光雷达和普通雷达)来获取。无源敏感器是通过可视成像的方法获得地形粗糙度、石头和陨石坑等地形特性信息;而有源敏感器是通过其获取的地形数据来拟合本地平面,从而获得地形表面的坡度和粗糙度信息。针对单敏感器的地形安全分析,已经得到了很多研究,并得到了应用。但是由于单敏感器地形安全性分析系统存在以下缺点:1)它不能够全面的获取地形特性信息;2)单敏感器环境适应性差,例如,相机只能在光照好的条件下使用[1]。因此,美国提出了新的基于多敏感器的地形信息融合分析技术,即证据推理地形信息融合分析技术和模糊推理地形信息融合分析技术,来获取着陆区域的地形安全性评分,从而实时选择着陆点。本文详细介绍了几种常用地形探测敏感器及其提取地形特性信息的方法,并在多敏感器获得的地形特性信息基础上,介绍了两种基于多敏感器地形信息融合分析技术的基本原理。
2 着陆地形敏感器
目前,在火星着陆器的着陆方案设计中,主要用无源敏感器和有源敏感器进行地形探测:
1)无源敏感器,即CCD/CMOS相机通过火星反射太阳光被动成像,然后利用图像处理和图像特征提取等技术从图像中提取特征信息,实现危险区的识别[2]。它能探测整个地形表面特征并且精度高,但是对光照的要求高。
2)有源敏感器,即通过比较测量波束发射和返回的时间,计算着陆区相对着陆器距离,然后按一定的扫描模式扫描整个目标区域,生成目标区域特定分辨率的3D图像或高程图,从而来识别危险区。相对无源敏感器,有源敏感器不受光照的影响,是其最主要的优势之一。另外,不同的有源敏感器也有各自不同的地形探测特点:普通雷达工作高度高,能够识别大的地形危险(如悬崖等)和地形起伏总体趋势;激光雷达比普通雷达工作高度要低,但是精度很高,尤其较低高度时,它能够探测如石头等较小的危险物[3]。
目前,针对敏感器的工作特性,将其分为以下工作组合[4]:
1)10~8km高度,只有普通雷达工作;
2)8~1km高度,普通雷达和相机共同工作;
3)1~0km高度,所有的敏感器共同工作。
安全着陆是火星探测任务最重要的因素之一,多敏感器的应用,可以增强地形探测的鲁棒性,并且不同敏感器其探测特性可以优势互补,能够更全面的获取与着陆安全有关的地形特性信息。
3 地形特性信息提取
敏感器获得的原始地形数据,必须经过处理后,得到陨石坑、石头、地形粗糙度等地形特性信息,才能进行后续的分析和处理。表1是提取的地形特性信息分类[4-5]。

表1 不同高度提取的地形特性信息分类
3.1 地形坡度
1)普通雷达获取的地形坡度,即通过对普通雷达测量数据进行平面拟合来估计地形倾斜度,其拟合平面的坡度近似认为是地形网格单元的坡度。普通雷达坡度特性提取公式为

式中r(x,y)表示普通雷达获得的某网格单元(x,y)的原始测量数据。
2)激光雷达获取的地形坡度,即拟合平面z=a′x+b′y+c′,通过最小中值平方回归方法来寻找最佳拟合参数 a′,b′,c′。网格单元的坡度表达式如下

3.2 地形粗糙度
1)相机获取的地形粗糙度,即用每个像元的灰度变化来表示地形粗糙度[6]

式中W表示相机拍摄范围内的某个子区域;c(i,j)是子区域W内的像素灰度;|W|表示W内的像元数目;表示子区域内的平均灰度。像元的灰度变化能够在一定程度上反映地形的变化状况。
2)激光雷达获取的地形粗糙度,即由最佳拟合平面对应的拟合值和激光雷达实测值之间偏差的绝对值表示

式中l(x,y)表示激光雷达获得的某网格单元(x,y)的原始测量数据。
3)普通雷达获取的地形粗糙度,即其实测值r(x,y)和平均测量值之差,表示其粗糙度特性,其公式如下

着陆器着陆支架高度对地形粗糙度有要求,当支架高度低于地形高度时,很可能发生着陆器倾覆或损坏的情况。
3.3 相机获取的陨石坑信息
根据文献[2]和[3],陨石坑用布尔数表示。并在算法中,把陨石的边界拟合为椭圆形边界。布尔地图表示的陨石坑由式(6)所示[7]

式中x和y表示坐标内的点坐标,a和b分别表示椭圆的长短轴。
3.4 相机获取的石头或其他危险物信息
与陨石坑相同,用布尔数来表示石头在某地形网格单元的出现

式中R表示图像中石头点的一系列像素位置。
4 地形信息融合分析技术
地形信息融合分析技术主要是多敏感器获得的信息融合而不是多敏感器获得的数据融合,是指采集由敏感器获得的有用的信息,然后将这些信息处理,以一种新的简单的数字形式表现出来,以便于决策处理。以本文所述的地形信息融合分析技术来说,就是把地形粗糙度、坡度等提取的地形特性信息作为地形融合分析推理器的输入,经过融合处理后得到安全评分 s(x,y),其中(x,y)表示地形网格单元坐标,s(x,y)∈[0,1],0表示最危险,1表示最安全。
4.1 证据推理地形信息融合分析技术
证据推理地形信息融合分析技术,就是根据登普斯-沙夫茨理论[8],结合各敏感器地形特性信息和其信息的可靠性,分别获得不同的地形安全性评分,然后再结合任意两个地形安全性评分,对它们反复应用登普斯融合规则,得到最终的地形安全性评分值。其中,根据各敏感器的原始数据,地形安全分类集合C为{不安全(unsafe)、安全(safe)和未知(unknow)}[5]。其具体过程为:
首先根据登普斯规则结合提取的地形特性信息得到普通雷达、相机和激光雷达的地形在不同地形分类情况下的地形安全性评分。以相机为例,相机提取的陨石坑和石头等危险物信息 f6、f7,其中属于unsafe分类的地形安全性评分为Pc(Ck)=max{f6,f7},属于safe分类的地形安全性评分为Pc(Cn)=1-Pc(Ck)。同理,普通雷达和激光雷达地形安全性评分Pr、Pl也可以根据实际要求同理获得。
然后,对每两个敏感器的安全评分进行融合得到任意两敏感器的安全评分,如式(8)所示:

式中k、n分别表示不同敏感器的编号,k,n为c,l或r,分别表示相机、普通雷达和激光雷达,Ck和Cn分别表示k敏感器、n敏感器的地形安全性分类,mkn表示任意两敏感器安全评分融合得到的总的安全评分,并且mkn(unknow)=1-mkn(safe)-mkn(unsafe)。
最后,某网格单元的最终安全评分如式(9)计算得到:

式中mRCL(C=safe)和mRCL(C=unsafe)分别表示某网格单元属于安全分类的总的评分与属于不安全分类的总的评分。
4.2 模糊推理地形信息融合分析技术
模糊推理地形信息融合技术,是将相机提取的粗糙度和危险物信息、激光雷达和普通雷达提取的地形粗糙度和坡度信息分别作为各自的模糊推理器的输入,经模糊化后,转换为模糊语言分类变量,然后再通过模糊规则推理和解模糊分别获得各自的地形安全性评分值。最后融合敏感器安全判断数据的确定性和各敏感器的安全评分获得着陆点最终的安全评分。图1是模糊着陆地形分析方块图。

图1 模糊着陆地形分析方块图
相机地形安全性模糊规则如表2所示。表2中的“危险”表示陨石坑、石头等危险物,其模糊语言分类为{PRESENT,ABSENT},当危险物模糊语言分类为PRESENT时,则根据表2中所示的模糊规则,自主判断地形安全性为HUNSAFE。否则结合地形的粗糙度共同判断地形安全性情况,其中“粗糙度”的模糊语言分类为{VROUGH,ROUGH,SMOOTH,VSMOOTH}。同理,普通雷达和激光雷达提取的粗糙度和坡度,结合模糊规则,共同判断地形的安全性,其模糊规则如表3示[9]。其中,表2和表3中的and与or符号是模糊规则连接词。另外,模糊语言分类是由科研人员根据实际的工程要求来确定。

表2 相机地形安全性模糊规则
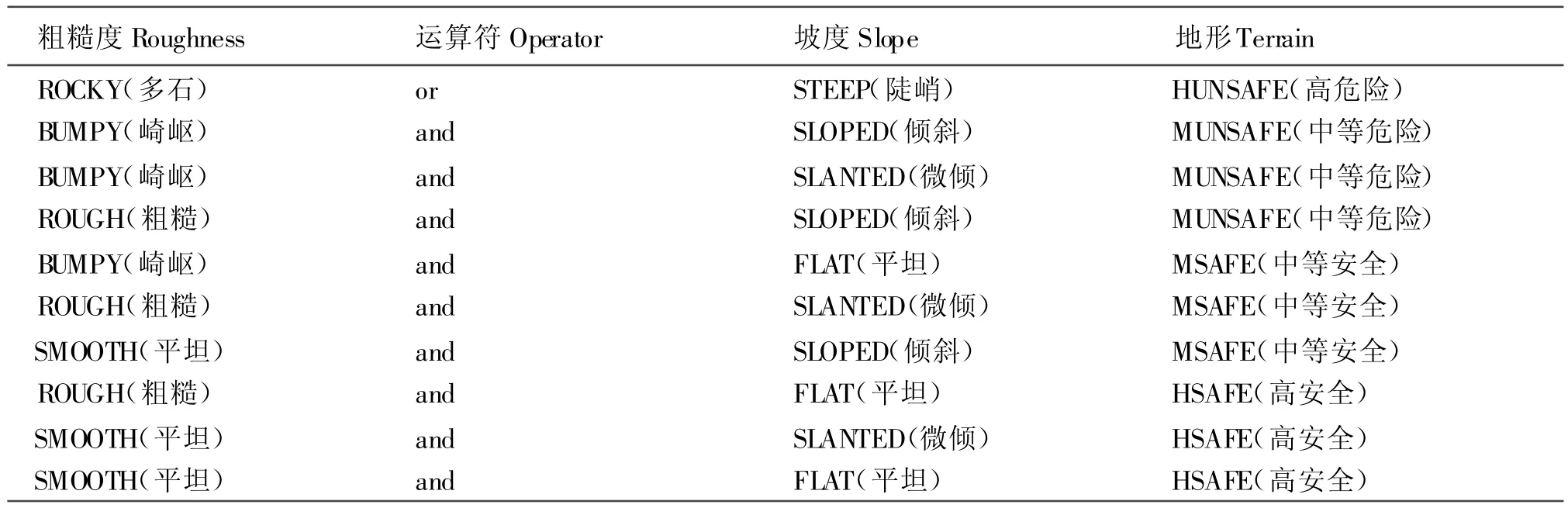
表3 普通雷达与激光雷达地形安全性模糊规则
在得到基于相机、普通雷达和激光雷达原始地形数据的地形安全性模糊语言判断后,通过解模糊分别获得相机的安全评分sc(x,y)、普通雷达的安全评分sr(x,y)和激光雷达的安全评分sl(x,y)。因为在着陆过程中,不同敏感器的测量数据的可靠程度不同,所以最终的安全性融合还需要考虑各自的地形安全性分析评分的确定性。表4和表5分别给出了普通雷达、激光雷达和相机数据确定性的模糊规则[1]。基于这些规则,经过推理和解模糊分别获得相机数据的确定性βc(x,y)、普通雷达数据的确定性 βr(x,y)和激光雷达数据的确定性β1(x,y)。
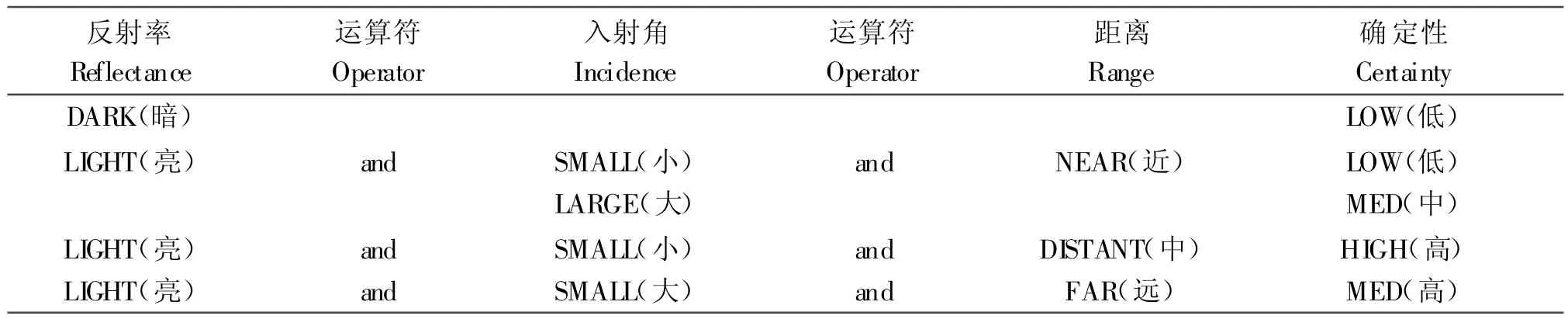
表4 普通雷达与激光雷达数据确定性模糊规则
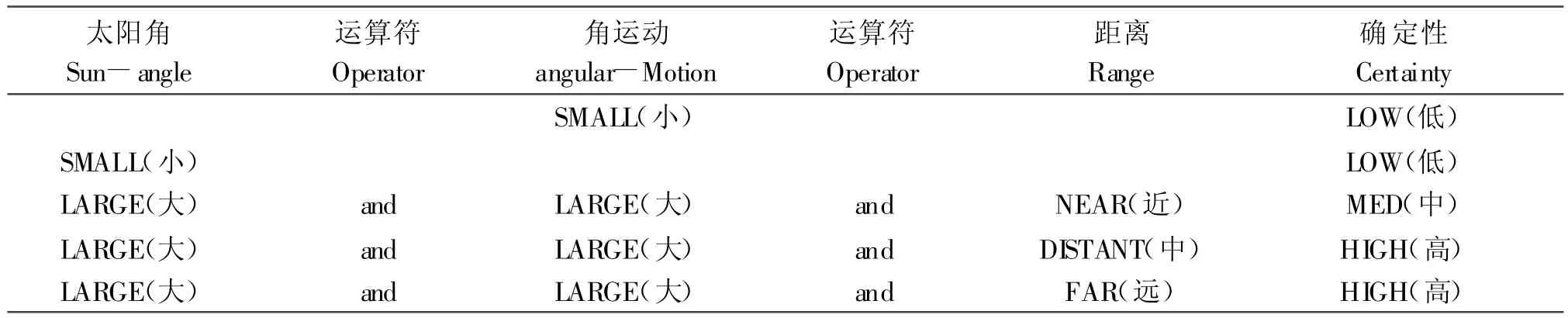
表5 相机数据确定性模糊规则
最后融合各敏感器地形数据的确定性和地形安全性评分得到最终的地形安全性评分,如式(10)[2]:

其中 βr(x,y)+βc(x,y)+βl(x,y)=1。
5 结束语
本文根据火星着陆实时地形探测的特点,介绍了两种基于多敏感器的地形安全性信息融合分析技术。这些技术都具有信息处理速度快、能够处理不精确数据等优点,能够适用于火星软着陆段安全着陆区的识别。
与上述介绍的第一种融合分析技术相比较而言,模糊地形安全性信息融合技术不依赖于预先得到的实验数据;能够基于人类专家知识,模拟其推理和判断过程;此外,它还能够方便的添加影响着陆点选择的其它因素,如燃料和科研人员的兴趣,作为着陆点选择的参考因素。所以它将成为未来着陆地形安全性分析技术的一个发展趋势。目前美国的JPL将模糊地形分类器应用于商业用途的“先锋号”探测车上,并基于类似的地形分析技术,实现了在着陆动力学仿真环境下的验证[3]。
[1]Howard A,SerajiH.Multi-sensor terrain classification for safety spacecraft landing[J].IEEETransactions onAerospace and Electronic Systems,2004,40(4):1122-1131.
[2]Bajracharya M.Single image based hazard detectionfor a planetary lander[C].In Proceedings of the WorldAutomation Congress,Orlando,FL,2002.
[3]KlumppA,Collier A J.A lidar-based hazard avoidance for safe landing on Mars[C].AAS/AIAA Space Flight Mechanics Meeting,Santa Barbara,CA,2001.
[4]Serrano N,Seraji H.Landing site selection using fuzzy rule-based reasoning[C].IEEE International Conference on Robotics and Automation,Italy,2007.
[5]Serrano N,Quivers A,Bajracharya M,et al.Evidential terrain safety assessment for an autonomous planetary lander[C].International Symposium on Artificial Intelligent,Robotics and Automation in Space,LA,CA,2008.
[6]Cheng Y,JohnsonA.A Passive imaging based hazard avoidance for spacecraft safe landing[C].i-SAIRAS,Montreal,Canada,2001.
[7]Huertas A,Cheng Y,Madison R.Passive imaging based multi-cue hazard detection for spacecraft safe landing[C].IEEE Aerospace Conference,Big Sky,MT,2006.
[8]Shafer G.A mathematical theory of evidence[M].Princeton University Press,1976.
[9]Seraji H.Safety measures for terrain classification and safest site selection[J].Autonomous Robot,2006,21(3):211-225.
猜你喜欢
北京测绘(2022年5期)2022-11-22
成都信息工程大学学报(2022年4期)2022-11-18
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年1期)2021-01-14
电子制作(2019年15期)2019-08-27
模具制造(2019年4期)2019-06-24
中国交通信息化(2019年1期)2019-03-26
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2018年16期)2018-09-26
汽车文摘(2017年4期)2017-12-07
