一种卫星多光谱图像亚像元波段配准精度自动评价方法
2010-06-11 01:53王洪海徐建艳龙小祥
航天返回与遥感 2010年3期
王洪海 徐建艳 龙小祥
(中国资源卫星应用中心,北京100094)
1 引言
多光谱图像波段配准精度是多光谱影像数据的一项重要指标。波段配准精度反映了波段间变形的一致性,直接影响图像的分类精度、镶嵌等。多光谱遥感图像在获取、传输、处理等过程中受到传感器、成像平台、成像条件、处理水平等各种因素的影响,会产生各种畸变,导致图像波段间并不完全配准;而实际应用需要,又不得不花费大量时间来配准不同波段图像,由此影响了遥感图像的应用范围和应用水平。因此,有必要准确评价其多光谱图像波段配准精度,分析波段间的失配规律,并对其进行校正。
图像波段配准精度评价的关键在于图像配准方法的选择。常用的图像配准方法分为基于图像灰度和基于图像特征两大类[1]。基于图像灰度的方法是直接利用图像的灰度信息,建立两幅图像之间相似性度量,不需要对图像进行特征提取,省去了特征匹配这个难点。由于用到了全部的图像信息,因此提高了配准的精度和鲁棒性,但同时也存在计算量大、速度较慢等缺点。基于图像特征的方法,是通过提取参考图像和待配准图像的一些共同特征,建立特征之间的对应关系,从而提取控制点对,实现图像的自动配准。这类方法的优点是它提取了图像的显著特征,大大压缩了处理的信息量,使得计算量小、速度较快,而且对图像灰度的变化具有鲁棒性,但特征匹配的难度较高,易出现误匹配。与基于灰度的方法相比,基于特征的方法不是直接在图像的灰度层次上计算两块图像之间的相似性,而是在图像特征的层次上进行配准,因此它对图像灰度变化不太敏感,更适合于灰度相差较大的多光谱不同谱段图像之间的配准。
本文将基于相位一致特征的遥感图像自动配准方法[2]应用于多光谱图像波段配准精度自动评价,提出一种基于相位一致特征的卫星多光谱遥感图像波段配准精度自动评价方法。并利用该方法自动评价了CBERS-02B卫星CCD多光谱图像波段配准精度。
2 基于相位一致特征的多光谱图像波段配准精度自动评价方法
2.1 相位一致特征检测原理
在频率域,图像的相位谱比幅度谱包含有更重要的信息,并且具有亮度和平移不变性。本文选择的相位一致特征检测方法正是利用了傅立叶变换的相位信息进行特征提取的,其基本原理是:人类视觉感知的图像特征出现在图像傅立叶谐波分量叠合的相位最大处,且特征类型可由相位的值决定[3]。实验和理论也已证明相位一致与人类视觉系统对图像特征的认知基本相符[4]。因此,与空域特征检测算子,如Roberts,Sobel,Canny,Förstner,LOG,Harris,SUSAN等[1]相比,相位一致特征对遥感图像亮度和对比度具有不变性,能捕捉图像的不变特征,同时适用于多种边缘特征的检测,并且相位一致是量纲为1的量,可以对大多数图像使用较为固定的阈值[5]。另外,相位一致特征检测算法对线特征产生单线响应,抗噪能力强,检测到的特征不会因为噪声而出现波动,因而具有更稳定的特征定位精度。
本文选用改进的相位一致模型特征检测公式[4]:

可见,相位一致是量纲为1的量,这个特性使得可以对大多数图像设定一个通用的特征阈值。
图像中某一点的局部频率信息通过Log Gabor滤波器在多尺度和多方向上计算获得。经二维Log Gabor小波计算的二维信号相位一致由式(2)给出:

式中 下标o表示滤波器的方向;n表示滤波器的尺度,对应n次谐波分量。
本文采用相位一致最大矩[6]描述点特征。相位一致最大矩值越大表明边缘点特征显著性越大。相位一致最大矩计算式为:

式中 P(θ)为滤波器θ方向的相位一致。由于仿射变换能够处理卫星遥感图像中的绝大多数几何畸变,因此本文实验选择仿射变换进行参数估计和变换。相位一致特征检测算法选择4个尺度,6个方向共24个滤波器,最小尺度滤波器的带宽为3个像素,相邻尺度间的带宽比为2.1,噪声估计取2,ε取0.000 1。另外,考虑到检测到的特征点数量对自动配准系统的精度和性能影响,本文通过变化提取阈值来提取一定量的特征点。
2.2 相位一致特征点匹配方法
对于特征匹配,文献[7]中提出了一种用于面特征匹配特征相似与空间一致性相结合的特征匹配方法,并将其与特征相似、穷尽搜索、随机采样一致,特征相似与空间一致组合等匹配方法比较,获得了非常好的匹配效果。这种匹配方法优点是不受特征类型、相似准则和变换模型限制。
特征匹配策略描述如下:假设待配准图像和参考图像中分别提取的点特征数量分别为NS和NR,FS和FR分别表示对应特征点集,即:


本文中的变换模型T,采用的是参数NT为6的仿射变换模型。
(1)特征点对空间一致性定义
令NS×NR维空间一致矩阵C表示任意特征点对间的空间一致性,即:


则:

其中,函数F(a)选择一维递减高斯函数:

由以上定义可知,利用参数 σ可方便控制空间一致度量。本文中参数 σ取0.5。特征点对间空间一致性越好,则 d(,,T)越小 ,相应F(d(,,T))越大,即 Cij越大 。
(2)特征点对特征相似定义
令NS×NR维相似矩阵S表示任意匹配特征点对间相似度量,即:

与匹配特征点对空间一致类似,特征相似度越高,Sij值越大。本文选取以特征点为中心的特征窗口间的相关系数作为图像相位一致特征间的相似测度。
(3)空间一致与特征相似结合
当所有特征点对间的空间一致和特征相似都最大时达到最佳匹配。因此定义如下函数:

当m最大时,匹配矩阵和变换模型参数均达到最佳。本文为了有效降低计算复杂度,提高计算效率,将其两步迭代计算方法加以改进,实现了单步迭代来完成特征匹配。
2.3 基于相位一致特征的多光谱图像波段配准精度自动评价方法
评价区域选取如图1所示。波段配准精度测试评价流程如图2。因均匀选择的评价区域不能保证每个区域有足够的特征点,因此可能出现匹配失败区域,如果在某个区域没有获得匹配点对,则舍去该区域。计算每个区域匹配特征点间的偏差均值作为该区域的配准精度指标,不同波段图像间的配准精度数据为5×5共25个值,这样可以比较完整反映该景图像数据的不同波段间整体配准精度及不同区域配准偏差规律。

图1 每景图像评价区域选取示意图
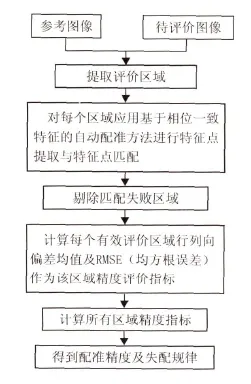
图2 波段配准精度自动测试评价流程
3 CBERS-02B卫星CCD多光谱图像波段配准精度自动评价结果
CBERS-02B卫星CCD相机是其最重要的遥感器,在可见光和近红外光谱段产生幅宽为113km的4个多光谱谱段和1个全色谱段的地面景物图像。然而,在未进行波段配准精度改进前,CBERS-02B卫星CCD相机多光谱影像经地面处理系统处理后的不同波段影像间存在超过1个像元配准偏差,与设计指标0.3像元精度相差较大,严重影响了图像的应用。因此,需要仔细分析其波段配准精度和失配规律,并据此进行校正。
考虑到地面处理系统处理的多光谱1级影像波段间也可能存在偏差,而这些偏差在图像系统几何校正后将会成为2级影像的内部几何畸变,造成2级影像波段配准偏差变得更大且难以校正。由此,为减小2级影像的内部几何畸变和提高波段配准校正精度,不仅测试评价CCD多光谱2级图像的波段配准精度,同时评价相应的1级图像的波段配准精度,有效定位波段间失配误差来源,为后期的校正提供依据。
3.1 CCD多光谱1级图像评价结果与分析
选取CBERS-02B星不同成像位置、不同时相CCD多光谱1级图像15景进行测试。测试均以图像的第1波段为参考。自动评价结果实例如表1所示。

?
表中数值均以图像左上角为坐标原点,表中Y为各评价区域特征点行方向平均配准精度,X为各评价区域特征点列方向平均配准精度,配准精度单位为像元大小。表中黑框区域因为没有提取到有效特征点,相应的偏差值无效,应舍弃。X均值为所有特征点的X向偏差平均值,Y均值为所有特征点的Y向偏差平均值。所有特征点RMSE显示了所有特征点的位置一致性。
评价过程中显示行向配准偏差一致性比较高,列向配准偏差不均匀,因此将行向各评价区域平均作为该方向精度指标。测试的15景图像(图例1~15)统计结果如图3~图6所示。图中横坐标位置为评价区域位置,由于CBERS-02B卫星CCD多光谱图像分2个通道下传,通道1下传波段3数据标识为3A,通道2下传的波段3数据标识为3B,地面处理系统分发的数据为波段3A数据。

图3 波段2行列向偏差变化规律

图4 波段3A行列向偏差变化规律

图5 波段4行列向偏差变化规律

图6 波段5行列向偏差变化规律
测试评价结果显示1级图像:
1)波段2、3A相对于波段1行向(Y)存在整像元平移偏差;
2)波段2相对于波段1列向(X)偏差较小,偏差为±0.25像元;
3)波段3A相对于波段1列向(X)存在不均匀斜线偏差,偏差从左偏1像元逐渐到右偏1像元;
4)波段4相对于波段1行列向(X,Y)偏差均较小;
5)由于波段5与其它波段成像不在同一光学视场,另外受姿轨控等因素影响,配准偏差不具有规律性。
由图3~图6可以看出CCD 1级图像波段间存在较大的偏差,并呈现了一定的规律性,波段1与波段2、3A、4间配准偏差存在不稳定性,而波段2、3A、4间的配准偏差一致性非常高,说明波段2、3A、4数据间的配准偏差为稳定的系统误差。利用本文方法对不同通道下传的波段3的0级数据间的同步性进行测试,结果显示存在不同步现象,且行偏差不稳定。
3.2 CCD多光谱2级图像评价结果与分析
根据1级图像偏差规律,选取上述15景1级图像中对应于1景异常景(图7、8中7号线)和3景规律一致(图7、8中1、2、3号线)的2级图像进行测试,结果如图7~图8所示。测试评价结果显示2级图像的波段配准精度与1级对应一致,但经系统几何校正后沿轨方向左右两侧边缘配准偏差发生了变化,左侧偏差变小,而右侧偏差增大,使得波段间沿轨方向的配准偏差增大。

图7 行向偏差变化规律

图8 列向偏差变化规律
3.3 CCD多光谱图像波段配准精度校正过程及结果
根据1级影像偏差规律在沿轨和垂轨两个方向对系统误差进行修正,为了避免多次重采样,这里主要校对整数平移偏差;然后在此基础上,把与探元位置有关的不均匀斜线偏差,通过修改相机探测元的坐标来校正2级影像波段配准精度。校正后的2级图像波段配准精度如图9、图10所示。图9和图10中波段2、3A、4间行列向配准偏差处于相同水平,说明了利用检测结果对系统进行校正提高了波段2、3A、4间配准精度,使得行列配准精度除局部边缘外达到了0.3像元水平;波段1图像X向与波段2、3A、4图像X向也被校正到了0.3像元水平,而波段1因与波段2、3A、4间误差不稳定,无法通过修改系统坐标参数校正Y向偏差。

图9 波段2、3A、4行方向配准精度
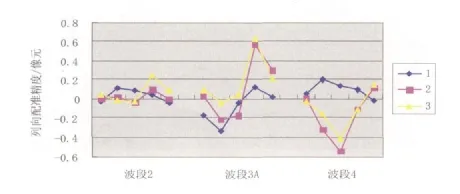
图10 波段2、3A、4列方向配准精度
4 结束语
本文实现了一种高精度自动化的波段配准精度评价方法。通过对CBERS-02B卫星CCD多光谱图像自动评价和校正,表明该方法对于亮度和对比度具有不变性,能均匀稳定提取多光谱数据不同波段影像大量同名特征匹配点,自动给出影像的不同区域的亚像元配准精度,实现对整景影像数据的配准精度较为完整准确的评价。并根据CBERS-02B卫星CCD多光谱图像自动评价结果进行了地面处理系统校正,使其波段2、3A、4图像间行列方向及与波段1图像列方向间除局部区域外均达到了0.3像元配准精度。对于不同数传通道间数据存在不同步现象,需要进一步分析不同通道间时间一致性和分景误差等影响因素,确认误差源。
[1]Zitova B,Flusser J.Image registration methods:a survey[J].Image and Vision Computing,Department of Image Processing,2003,21:977-1000.
[2]王洪海.基于相位一致特征的CBERS-02B遥感图像自动配准[J].遥感信息,2009,5:47-53.
[3]Kovesi P.Image features from phase congruency[J].Videre,1999,1(3):1-26.
[4]Kovesi P.InvariantMeasures of Image Features From Phase Information[D].Petrh:Department of Computer Science,The University of WesternAustralia,1996.
[5]肖鹏峰,冯学智,赵书河,等.一种基于相位一致的高分辨率遥感图像特征检测方法[J].遥感学报,2007,11(3):303-310.
[6]Wong A,Clausi D A.ARRSI:Automatic Registration of Remote-Sensing Images[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(5):1483-1493.
[7]Wen Gongjian,Lv Jinjian,Yu Wenxian.A High-Performance Feature-Matching Method for Image Registration by Combining Spatial and Similarity Information[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(4):1266-1277.
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
商界评论(2022年1期)2022-04-13
学生天地(2020年6期)2020-08-25
国学(2020年1期)2020-06-29
家庭影院技术(2018年11期)2019-01-21
电子制作(2018年2期)2018-04-18
摄影之友(影像视觉)(2017年10期)2017-11-07
制导与引信(2017年3期)2017-11-02
摄影之友(影像视觉)(2017年1期)2017-07-18
电子制作(2017年8期)2017-06-05