火星着陆器降落相机参数设计
2010-06-11 01:53王海涛黄巧林蒋万松
航天返回与遥感 2010年3期
王海涛 黄巧林 蒋万松
(北京空间机电研究所,北京100076)
1 引言
降落相机是着陆器在降落过程中获取降落图像的主要传感器,美国“勇气号”、“机遇号”和“凤凰号”等火星探测器都搭载了降落相机,并在其中发挥了很大的作用。目前,国内用于火星探测的降落相机仍然处于起步阶段,相关工程实践还很少。国外降落相机设计具有一定的前瞻性,可为我国降落相机的研制提供参考。
对于当前已有的火星探测器来说,降落相机是DIMES(Descent Image Motion Estimation System)系统的主要传感器之一[1],降落相机的主要功能是获取DIMES为计算着陆器的水平速度和垂直速度所需要的降落图像。而本文则对降落相机的功能进行了重新设计,并根据设计的功能分析了降落相机的工作过程,然后设计了降落相机的部分参数。
2 降落相机功能设计及工作过程分析
2.1 降落相机功能
降落相机的主要功能是拍摄计算着陆器水平速度和垂直速度所需图像,“勇气号”搭载的降落相机在降落过程中一共拍了3张图片,拍图片时着陆器的高度分别是1 983m、1 706m和1 433m,通过这3张降落图像之间的内部牵制关系可以估算出降落过程中着陆器的水平速度和垂直速度[2]。随着深空探测的进一步发展,着陆在火星表面进行实地考察是必然趋势,为安全着陆在火星表面,着陆器必须具有障碍识别和自主选择着陆点功能。而降落相机本身就是在着陆器降落动态过程中对着陆点地形地貌成像探测的主要手段,所以有必要重新设计降落相机的功能。本文设计的降落相机具备以下功能:
1)通过对在降落过程中拍摄的图像进行处理计算来获取着陆器水平速度,这项技术已经在火星探测的实际工程中得到应用。
2)获取着陆器降落过程中各个高度时降落区域的火星地形地貌图像,对火星表面的地形地貌图像进行存储和分析处理,得到地形地貌包括坡度坡向、石头、陨石坑等的实时信息[3]。并根据图像处理的结果,提供出备选的安全着陆区。
2.2 降落相机工作过程
重新设计降落相机功能之后,降落相机的工作距离和工作时间都会有所变化,本文设计的降落相机安装在着陆器底部,在抛弃隔热板之后(大约12km),降落相机就开始工作,结合火星探测器着陆过程,参考“凤凰号”火星着陆器弹道数据[4],本文对降落相机工作过程进行设计。
降落相机工作分为两个阶段:降落伞阶段和反推火箭阶段,在这两个阶段,降落相机的帧频、获取降落图像数量、积分时间等参数都不同。
1)降落伞阶段。从抛弃隔热板到着陆器分离[5],高度范围是11.3km~940m,持续时间为61s,隔热板抛弃时着陆器的弹道倾角为-40.5°,此时着陆器速度为115m/s,水平速度87.45m/s,垂直速度74.69m/s。着陆器分离时着陆器的弹道倾角为-75.7°,此时着陆器速度为56m/s,水平速度为13.83m/s,垂直速度为54m/s。在降落伞阶段,着陆器弹道倾角变换较大,本文设定降落相机每0.5s获取一幅落图像,由于降落相机的积分时间是ms级,所以进行障碍识别和安全着陆区选择的时间大约有0.5s,对于降落相机进行障碍识别和着陆区选择等各项功能实现已经足够。在大约2 000m高度时,降落相机的速度测量系统开始利用获取的降落图像来计算着陆器的水平速度和垂直速度,测速系统工作高度范围是2 000~51m,计算出着陆器任意时刻的速度信息,并送与着陆器导航系统。
2)反推火箭阶段。从着陆器分离到常速度阶段,高度范围是940~51m,“凤凰号”着陆器在常速度阶段的速度为8m/s,可以认为水平速度为8m/s,垂直速度为0。本文设计降落相机具有障碍识别和着陆区选择的功能,实现这些功能降落相机需要一些计算时间,所以要对整个反推火箭阶段的水平速度和垂直速度进行限制。本文设定在常速度阶段着陆器的水平速度控制在3m/s以内。
从降落相机开始工作一直到100m高度整个过程,降落相机的障碍识别和着陆点选择系统对每一幅降落图像进行障碍识别,在降落伞阶段,障碍识别和着陆点选择系统首先识别出体积较大的障碍物,同时选择几个相对比较安全的着陆区,并将信息送与着陆器的着陆导航系统以避开这些障碍,在反推火箭阶段,降落相机分辨率较高,障碍识别和着陆点选择系统能够识别出更小的障碍和更加安全的着陆区,同样将这些信息送与着陆导航系统。在200m高度时,降落相机已经能够识别出最小的能够对着陆器安全着陆构成威胁的障碍物,着陆导航系统接收到准确的障碍信息和备选的安全着陆点,从而实现安全着陆。其工作过程如图1所示。
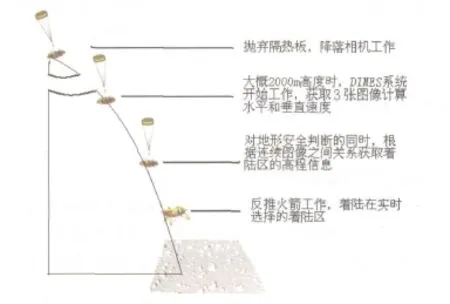
图1 降落相机工作过程
2.3 本文设计降落相机功能对降落相机性能参数的影响
本文设计的降落相机功能较目前已使用的降落相机有较大变化,其工作距离、工作时间和性能参数等都会发生改变。
1)工作距离。“勇气号”降落相机从约2km高度开始工作,功能扩展后的降落相机工作距离约为12km~0.1km。
2)工作时间。“勇气号”降落相机工作时间较短,仅仅是在大约2 000m高度时开始拍摄计算着陆器水平速度和垂直速度所需的3张降落图像,功能变化后的降落相机工作时间从隔热板抛弃之后开始,直到大约距离火星表面100m时工作结束。
3)功能。“勇气号”降落相机功能就是拍摄获取着陆器水平速度和垂直速度的降落图像;本文设计降落相机的功能有测速、障碍识别、安全着陆点选择等。
由于工作距离、工作时间和相机功能的变化,降落相机的诸多参数包括景深、焦距、视场角、帧频、积分时间、F数等也都需要重新设计。
3 降落相机参数设计
本文将根据降落相机应用的火星环境和新的功能要求设计降落相机部分参数。
3.1 降落相机工作环境及特点
3.1.1 工作环境
火星大气的主要成分是CO2,按体积计算占总量的95%;其次是N2,占2.7%;再次是Ar,占1.6%。大气的次要成分有O2、CO、H2O 、Ne、Kr、Xe和O3,此外还有微量的原子氧、原子氢和H2O2,这些成分与地球的平流层非常近似。
火星面貌与月球高地非常相似,到处都是古老的、非常密集的撞击坑地形,并分布有无数网格状的河谷系统。火星表面平原特征一般表现为荒凉的沙漠、连绵不断的丘陵和洼地。火星表面布满大量的砾石、陨石坑等。火星大气中有大量的浮尘,其主要特点是具有很强的侵入性、对器械的磨损和吸附性。火星浮尘的侵入性取决于浮尘颗粒的大小、硬度和形状,浮尘颗粒对着陆器械会有很大的磨损,严重影响其气密性;吸附在光学仪器上会影响其正常工作。而且,浮尘聚集在一起也会产生大量的静电,这对着陆器的电子元器件有很大的损伤。
3.1.2 特点
降落相机是高性能、微小型化光学成像探测设备,一般安装在着陆器底部,可以实现着陆器在降落过程中获取星体表面地形地貌高分辨率图像的科学目标。深空探测对着陆器的质量和有效载荷有很大的限制,考虑到着陆器的总体要求,降落相机具有以下特点:
1)体积小,质量轻。“罗塞塔号(Rosetta)”体积为90mm×63mm×86mm,质量为400g。本文设计的降落相机尽管在功能上较目前已用的降落相机多,但为减小着陆器的载荷,本文设计的降落相机在体积上要求越小越好。
2)视场角大。为保证降落相机在着陆器降落过程中抖动、晃动等不稳定情况下能够正常工作,本文设计降落相机的视场角为60°,而“凤凰号”降落相机视场角是66°。
3)工作距离变化较大。从大约12km高度时开始工作,一直到大约100m高度,“勇气号”降落相机工作距离大约是2~1.2km。
4)实时性特点。降落相机要实时获取着陆区地形信息,实时识别着陆区障碍。实时选择安全着陆点。
3.2 性能参数选择
根据火星大气成分,而且着陆器一般在白天着陆,所以本文选择大气窗口为0.4~1.1μ m。降落相机本身有体积小、质量轻的特点,探测器选择面阵CMOS探测器,因为CMOS探测器在集成度、功耗和体积上都较CCD探测器高。在作用距离为2km时,做到像元分辨率为0.8m;作用距离为200m时,做到像元分辨率为8cm,因为小于直径8cm的石头或者陨石坑不会对着陆器安全构成着陆威胁[5]。根据火星大气的成分和着陆要求,降落相机具体设计参数如表1所示,积分时间和帧频的选择对于降落相机成像至关重要,本文将对其进行详细分析。

表1 降落相机参数
3.2.1 帧频的确定
降落相机在降落过程中成像,物距一直在变化,在降落伞阶段和反推火箭阶段的水平速度和垂直速度是计算帧频的基础。假设着陆器做匀减速运动,根据降落相机的参数(表1),结合“凤凰号”火星着陆器飞行数据,在降落伞阶段和反推火箭阶段降落相机速度和覆盖范围及分辨率计算结果如表2所示:

表2 降落相机两个工作阶段相关数据
在反推火箭阶段,降落相机距离火星表面相对较近,如果速度过快,降落相机没有足够的积分时间获取足够的能量,造成降落图像像质下降,要获取足够能量可能对图像造成拖影,不利于着陆区障碍信息提取,所以在反推火箭阶段要控制着陆器的水平速度和垂直速度在一定的范围内:在100m高度,降落相机的水平速度必须控制在6m/s以内,垂直速度必须控制在11m/s以内。
为实现降落相机的选择安全着陆区和定位着陆器的准确位置的功能,降落图像应有一定的连续性和相关性,本文用嵌入率衡量,嵌入率是指后一幅图像和前一幅图像重叠面积与覆盖面积较大的图像面积的比值。
根据表2数据,本文假设:
1)用于避障的最后一幅降落图像拍摄高度为100m,此时地面分辨率为3.94cm;
2)100m高度时,着陆器水平速度可以控制在6m/s内,为降落相机整体参数设计有一定的冗余度,假设垂直速度控制在20m/s内。
根据积分时间内,运动造成像移小于0.3个像元则不影响图像品质的经验,根据前一帧后一帧之间的关系,如图2所示,经计算得到帧频的比较如表3所示。

图2 前一帧图像后一帧图像之间关系
图2中,第一、第三两个“×”号之间的长度代表前一帧图像对应的地面长度,第二、第四两个“×”号之间的长度代表后一帧图像对应的地面长度,第一、第二两个“×”号之间的长度代表水平允许移动的距离。

表3 940m高度时嵌入率同帧频的关系

表4 100m高度时嵌入率同帧频的关系
在同等速度条件下,需优先考虑近地面时对相机帧频的约束[6],在高度较高时的帧频比高度较低时帧频要小的多,比较表3和4数据,选择嵌入率为1∶1.2,帧频选择为3.12(帧◦s-1)。
3.2.2 积分时间的确定
在积分时间内的水平和垂直运动,会引起成像品质的下降,反过来,这两种运动也约束了相机积分时间的确定。因此,积分时间的确定主要由以下几个因素共同确定:
1)水平运动引起的像移量:在积分时间内的像移会引起图像的模糊,依据经验,像移小于0.3个像元时,对成像品质影响不大,这种模糊可采用传函下降来描述:

2)垂直运动引起的地面分辨率的变化量:在相机曝光期间由于着陆器的下降会引起地面分辨率的下降,这样也会使图像变得模糊,这里采用边缘中心像元产生的模糊来评判图像品质的下降,位置如图3和图4所示。
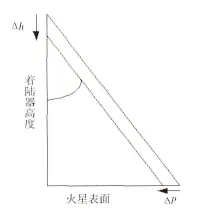
图3 高度变化同成像面积的关系

图4 垂直运动对成像的影响
这里同样采用像移传函来描述图像模糊:

降落图像都是在降落运动过程中获得的,分别考虑水平速度和垂直速度对降落相机成像的影响,具体分析如下:
“凤凰号”火星着陆器飞行数据在文献[4]中有详细介绍,根据表2中的数据可知,着陆器距离火星表面11.3km时,着陆器抛弃隔热板,垂直速度是74.69m/s,水平速度是87.45m/s;着陆器分离高度大约是940m,此时着陆器水平速度大约13.83m/s,垂直速度大约是54m/s,同样假设着陆器的降落过程是匀减速运动,则像移为0.3像元所对应的最大积分时间如表5:

表5 水平速度对积分时间的限制
降落相机开始工作之后的降落过程中,根据表2中关于速度的估计,在降落伞阶段的最大垂直速度不超过80m/s,垂直降落产生的边缘像移0.3像元所对应的最大积分时间如表6:

表6 垂直速度对积分时间的限制
在940~51m反推火箭阶段,反推火箭主要工作是减小着陆器的速度,并推动着陆器向安全的着陆区运动,根据表2中速度估计,像移为0.3像元所对应的积分时间如表7、表8:

表7 水平速度对积分时间的限制

表8 垂直速度对积分时间的限制
比较表5~8数据,尤其是表中黑斜体部分数据,我们得知在降落伞阶段允许的最大积分时间是3ms,在反推火箭阶段,最大允许积分时间是2.1ms,经过权衡比较,降落相机积分时间应不大于2.1ms。
4 结束语
本文主要设计了降落相机的功能和工作过程,在功能上,本文设计的降落相机较“勇气号”、“凤凰号”等降落相机增加了障碍识别和着陆点选择功能;在工作过程上,本文设计的降落相机较“勇气号”、“凤凰号”降落相机在工作高度、工作时间都有较大区别。最后,根据降落相机功能要求和所应用的火星环境要求,参考“凤凰号”弹道飞行数据,本文对降落相机的帧频、积分时间等参数进行了设计计算,计算结果表明:降落相机的帧频、积分时间都随高度、水平速度和垂直速度的变化而变化。所以,本文的计算结果并不对所有火星探测器降落相机适用,不同的弹道有不同的飞行数据,但是其计算方法却有普适性。
但是,降落相机设计是一个复杂的系统工程,不仅要考虑到降落相机工作过程,还要充分分析降落相机的应用环境、星体表面不同时间段的反射率变化、CMOS芯片的输出信号大小与反射率和F数以及不同的积分时间之间的关系约束,要结合总体要求和相机总体载荷以及各参数之间的约束综合选择降落相机的各项参数。
[1]Cheng Y,JohnsonA,MatthiesL.MER-DIMESA Planetary Landing Application of Computer Vision[C].IEEEComputer Society Conference on Computer Vision and Pattern Recognition,2005:806-813.
[2]Cheng Y,Goguen J,Johnson A,et al.The Mars Exploration Rovers Descent Image Motion Estimation System[J].Intelligent Systems,2004(5-6):13-21.
[3]Huertas A,Cheng Y,Madison R.Passive Imaging Based Multicue Hazard Detection for Spacecraft Safe Landing[C].Aerospace Conference,2006 IEEE,2006:1-14.
[4]王海涛,付丽璋,蒋万松.“凤凰号”火星探测器着陆过程[J].航天返回与遥感,2009,30(3):8-15.
[5]Desai P N,Prince J L,Wueen EM,et al.Entry,Descent,and Landing Performance of the MarsPhoenix Lander[D].AIAA 2008-7346.
[6]陈世平.空间相机设计与试验[M].北京:中国宇航出版社,2003.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25
海外文摘(2021年7期)2021-08-31
中学生百科·大语文(2021年4期)2021-05-12
大科技·百科新说(2020年10期)2020-03-01
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
发明与创新(2016年5期)2016-08-21
中学科技(2015年7期)2015-07-03
文苑·经典美文(2009年7期)2009-08-25