火星探测器减速着陆技术分析
2010-06-11 01:53贾贺荣伟
航天返回与遥感 2010年3期
贾 贺 荣 伟
(北京空间机电研究所,北京100076)
1 引言
随着航天技术的不断进步和发展,深空探测作为一个国家综合国力和科学技术发展水平的重要特征与标志,引起了世界各国的极大关注。火星是太阳系九大行星中最为引人注目的一颗,它是地球外侧的第一近邻。在九大行星中,按与太阳的距离排列,火星是太阳的第4颗行星,属于外行星;由于火星紧靠地球,其自然环境与其他行星相比更接近地球,属于类地行星。因此,火星探测作为深空探测的一部分,成为现在和未来一段时间内人类进行宇宙探索的热点之一。
目前,世界航天大国均在制定各自的火星探测计划,以实现火星表面的着陆和取样返回,甚至载人飞行。我国作为航天大国之一,虽然已经在空间探测领域取得了举世瞩目的成就,但是在火星探测方面却刚刚起步。因此,我国要及时地借助目前的国际环境条件,充分利用已有的技术基础和条件,加速开展火星探测的研究,实现我国在空间探测领域的新突破。
火星探测器减速着陆系统可以借鉴许多地球上成熟的回收与着陆技术,但是由于火星环境与地球有很大不同,要实现火星探测的软着陆,完全掌握火星探测器减速着陆技术仍具有很大的难度和挑战性[1]。
2 火星的环境特征
火星处于地球轨道外侧,与太阳的平均距离为2.28×108km(1.524AU)。火星轨道形状近似圆形,轨道偏心率为0.093 5;平均轨道速度为24.1km/s;绕太阳的公转周期为687天,自转周期为24h37min23s;平均半径为3389.5km,是地球的0.53;质量为6.57×1023kg,是地球的0.11;平均密度为3.94g/cm3;表面重力加速度为3.8m/s2,相当于地球的 0.38;表面物体的逃逸速度为5.0m/s,漫反射系数为0.250,太阳辐射强度589.2W/m2,为地球的0.431。火星有2个天然卫星火卫1(福波斯)和火卫2(德莫斯)。
火星大气层很稀薄,一般分为上、中、下3层,200km以上为上层大气,45~200km为中层大气,45km以下为下层大气。平均大气密度仅相当于地球的1%。火星表面的大气压为700~1 000Pa,相当于地球上空30~40km高度处的大气压,其主要成分包括CO2(95.32%)、N2(2.7%)、Ar(1.6%)、O2(0.13%)、CO(0.08%),以及少量的H2O(2.1×10-2%)、NO(1.0×10-2%)、Ne(2.5×10-4%)、H2O2(0.85×10-4%)、Kr(0.3×10-4%)、Xe(0.08×10-4%)。平均分子摩尔质量为43.34g/mol。
火星的表面温度会随地理位置、时间和表面性质发生变化。根据记录,火星上的平均温度为-63℃,最高20℃,最低-140℃。火星上风的推动力跟地球上的风一样,都来自太阳。有数据显示,虽然火星表面空气稀薄,但由于温度分布不均匀,火星上大气的运动非常剧烈,平均风速达4.3m/s,且风向变幻不定,并常常伴有尘暴。火星表面地形起伏较大,呈北低南高的不对称结构,北半球是占总面积30%的低洼平原,南半球是遍布陨石坑的古老高地。
3 火星探测器减速着陆系统方案的特点
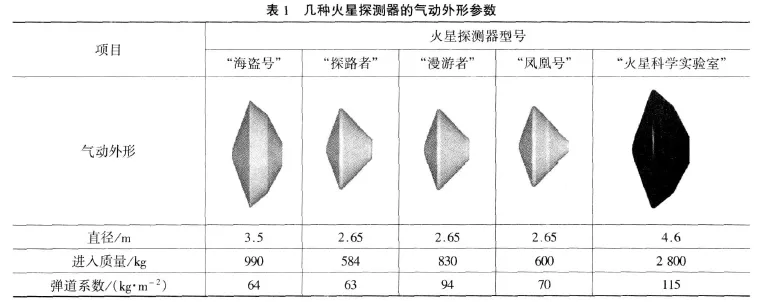
结合火星的环境特征,通过对国外典型火星探测器减速着陆系统方案的分析发现,“海盗1号”、“海盗2号”、“火星探路者”、“火星探测漫游者A”、“火星探测漫游者B”及“凤凰号”这6个无人火星探测器的减速着陆系统的大体框架及使用的主要技术差别不大,基本都是以“海盗号”火星探测器为主要设计基准,因此,可以把已成功应用的6个无人火星探测器的减速着陆系统称为“海盗号系的减速着陆系统”,其特点如下[2]:
1)探测器的进入质量均在1 000kg以下,着陆质量在600kg以下;
2)探测器的弹道系数较小,均小于100kg/m2;
3)探测器着陆点的误差均在100km左右;
4)着陆点高度都在MOLA-1.4km以下;
5)探测器的气动外形均是采用“海盗号”70°半锥角、钝度为0.5的球锥外形;
6)开伞速度马赫数在1.1~2.0间,处于超声速状态下开伞;
7)降落伞是基于“海盗号”所用的盘缝带伞,且均是采用弹伞筒直接弹伞和一次开伞。
到目前为止,火星探测减速着陆器的发展可以大致分为3个阶段。即:可行性研究阶段,“快、好、省”政策实施阶段和采样返回或载人火星探测减速着陆技术准备阶段。目前,正在研制的“火星科学实验室”(原计划2010年发射,现因故推迟)及载人火星探测论证,主要以进入质量大于1 000kg的探测器能够安全避障、精确着陆的相关减速着陆技术为研究对象。
目前,美国对于火星探测器减速着陆方面的研究工作,也主要是针对未来采样返回或载人火星探测的相关减速着陆技术的攻关研究。
4 火星探测器减速着陆技术分析
火星表面大气稀薄,可以利用气动力进行减速,以实现火星探测器减速着陆目的。但是,火星大气层的成分、物理性质与地球的大气存在较大差别,而且火星探测器减速着陆系统方案受其任务要求的影响较大,因此,火星探测器的减速着陆技术有其自身特点。由于在星际着陆方面,我国还没有系统研究,火星探测器减速着陆技术的很多关键和重点环节需要进行深入研究。本文对国外火星探测器减速着陆技术进行了重点分析研究。
4.1 减速着陆系统方案
由于火星大气密度稀薄(其密度是地球的1%),火星探测器依靠其自身气动外形进行减速时,相比地球上的飞行器需要在高度更低时才能达到明显的减速效果。在火星上,只有进入器的弹道系数小于50kg/m2,且高度非常接近火星表面(10km以下)时,才能将有效载荷的速度降低到亚声速阶段。或者说,在这种稀薄大气环境下,适合开伞时的高度相对较低,即留给减速着陆系统剩余部分的时间缩短,可能导致进入器没有充足时间做着陆准备。同时,火星大气密度是随火星年不断变化的,这使得很难研制出一种通用的减速着陆系统方案来适应所有火星大气环境的需要。当然,目前成功实现火星着陆的无人探测器着陆点的高度都在MOLA-1.4km以下,着陆点的高度也限制了无人探测器减速着陆系统的发展。
对于火星探测器而言,选择一个适合自身的减速着陆系统方案,对探测器的设计、成本以及具体的实施都十分重要。由于火星探测器一般都是以很高的速度进入火星大气层,如“探路者”进入火星大气层时的速度高达7.26km/s,所以要实现探测器的安全减速着陆,必须依靠探测器本身合适的气动外形、降落伞以及着陆缓冲装置等多种手段共同保证。此外,考虑到探测器的质量和弹道的简化,大多数火星探测器均以弹道式进入火星大气层,最近发射成功的“凤凰号”火星探测器计划采用升力控制进入的方式,但是由于各方面的原因,最终还是采用了弹道式进入[3]。原计划2010年将要发射的“火星科学实验室”探测器则需采用升力控制进入的方式,以求获得更加精确的着陆点。火星探测器在气动力作用下急剧减速,将会产生严重的气动加热和制动过载,探测器的各种减速装置必须能够承受这些恶劣环境条件的考验。尽管火星减速着陆系统外观上有很大不同,但是这些系统方案也都有着明显的共同点,即通过降落伞减速到达离火星表面1km处,接近最终速度时着陆器与伞分离(速度为55~90m/s)。但是,由于目前火星探测器的减速着陆系统方案还难以理想地处理火星表面潜在的随机危险[4],所以,要想更好、更安全地实现火星减速着陆,必须获取更加准确的火星表面参数和大气参数,合理选择一个适合探测器本身的减速着陆系统方案。
选择着陆系统最优的安全减速方案,不只是对无人火星探测减速着陆系统的要求,对于载人火星探测减速着陆系统更为重要。
4.2 气动外形减速技术
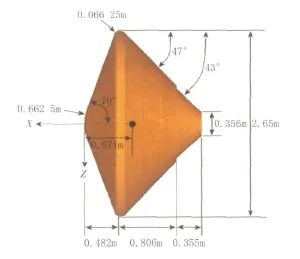
图1 “凤凰号”的气动外形
合适的气动外形是确保火星探测器安全通过高速高温飞行区,并最终实现火星软着陆的重要保障。根据现有火星探测器的数据,从进入火星大气开始,至降落伞开伞完成,探测器的速度由几千米每秒迅速降低到几百米每秒左右,这个阶段主要依靠探测器自身的气动阻力减速。但是由于火星大气非常稀薄,相比地球上的减速着陆,同样的有效载荷质量需要更大直径的外形结构和更好的防热材料,体积和质量也会增加很多。为了减少进入时的制动过载和气动加热,并能控制好着陆点,可以采用升力式或弹道升力式的外形和配置。
火星探测进入器的气动外形必须能够提供较高的阻力系数。在已成功实现无人火星探测的减速着陆系统方案中,均借鉴了“海盗号”成功的经验,如之后的“探路者”、“漫游者”以及“凤凰号”火星探测器的气动外形均采用“海盗号”70°半锥角的球锥形外部气动形状(其零攻角时阻力系数为1.68)。这种气动外形可以适应各种不同的进入轨道以及0°~11°的攻角范围。“凤凰号”的气动外形如图1所示。
进入器的减速及防热性能都是由进入器弹道系数决定的,低的弹道系数可以获得更低的热峰值和过载峰值。但是到目前为止,保证探测器能够安全进入并着陆到火星表面的弹道系数取值范围仍保持在63~94kg/m2之间。对于更大弹道系数的探测器,如何安全进入并着陆到火星表面是美国目前正在研究且亟待解决的难题。弹道系数取决于阻力系数、质量及参考面积,即探测器的气动外形结构,这就对探测器的气动外形结构设计提出了更高的要求。
目前,火星探测器上使用的防热材料为SLA-561V,但是如果气动热峰值超过100W/cm2,就需要对SLA-561V材料进行性能改进或者寻找一种可以适应这种新的飞行环境的新型材料。
可见,气动外形结构及防热材料的选择,也是限制火星探测器减速着陆技术发展的一个重要因素[1]。
?
4.3 降落伞减速技术
降落伞是航天器减速着陆系统最常用的减速装置之一,火星探测器也不例外。已成功实施的无人火星探测器减速着陆系统方案中,都包括超声速伞减速的部分。超声速伞的具体作用就是使进入器的速度减小至亚声速段。除此之外,超声速伞还可以为进入器在跨声速阶段提供足够的稳定性。
“海盗号”使用的最大降落伞直径为16m。在“海盗号”任务之前,美国就对火星着陆器使用降落伞进行减速的可行性进行了专题研究,其中对降落伞的选型、性能评估以及环境的模拟进行了大量的试验工作。“海盗号”任务正式开始后,又进行了一系列的风洞试验、空投试验和气球发射试验。这些试验积累了大量的试验数据和经验,为后来的火星着陆器的降落伞研制奠定了坚实的基础。“探路者”、“极地着陆者”、“漫游者”(包括“勇气号”和“机遇号”)以及“凤凰号”降落伞的设计都是基于“海盗号”降落伞的设计,并根据各型号自身的技术要求进行了相应改进,在研制过程中通过一系列对应的试验进行比较和验证。从“海盗号”到“凤凰号”几次火星探测着陆任务中,降落伞均工作正常,这表明美国已经掌握了一套比较成熟的火星探测用降落伞研制的工程实践经验和试验方法[5-7]。
对火星探测器使用的降落伞而言,其主要问题是火星大气密度低。在地球大气中能够正常工作的降落伞在火星上就会出现许多意想不到的问题,降落伞在超声速条件下还存在开伞困难、开伞不稳定、阻力系数下降等问题。20世纪60~70年代,美国对低密度条件下超声速降落伞进行研究,包括环帆伞、十字形伞、盘缝带伞,并做了风洞测试和全尺寸高空投放等试验。经过多个方案比较后,“海盗号”火星探测器最终选择了单个、不收口的盘缝带伞作为气动减速装置,该方案是在满足系统设计要求下最简单的方案。对于超声速条件下开伞的情况,前体尾流区的影响是关键因素,要求降落伞与前体间有足够的距离。“海盗号”设计的降落伞与前体相对距离大于前体参考直径的9倍。另外,为了保证降落伞能可靠弹出尾流区,采用了弹伞筒开伞的方案。“海盗号”的成功减速与着陆,验证了盘缝带伞能够适应火星大气稀薄的环境以及超声速开伞的条件,并一直被美国的其他火星探测减速着陆系统所采用。
未来的火星表面实验站和载人登火星计划都需要将更大的有效载荷着陆到火星,“海盗号”所采用的降落伞系统已经无法满足着陆系统的减速要求,这就需要设计全新的降落伞系统来满足火星探测器的发展。现在所采用的方法主要有2种:一种就是设计更大面积的超声速伞来承担更大的有效载荷,但是其地面验证试验比较困难,可靠性难以得到保证;另一种方法就是采用两级开伞的方案,一个超声速伞和一个亚声速伞相结合,从而达到为探测器减速的目的。
2003年,美国喷气推进实验室进行了SPTT(亚声速降落伞技术研究)项目的研究,以验证两级减速方案的可行性。但大型环帆伞在低密度大气下开伞、稳定性等问题还没有完全解决。此外,由于在研的“火星科学实验室”探测器着陆质量和气动外形直径的增大,使其降落伞直径也需要相应增大。目前,在地面做过验证试验的最大降落伞直径为19.7m,可以满足“火星科学实验室”的性能要求。但是,对于更大质量的无人火星探测减速着陆系统方案而言,必须确定一种新的地面验证方法来辅助完成直径大于19.7m的超声速伞的研制。对更大质量的火星探测器来说,采用分级的降落伞系统也可以完成任务需求,这也是解决尺寸问题的途径之一。
4.4 开伞控制技术
开伞控制技术是航天器减速着陆系统设计中的一项关键技术,这项技术能否成功应用直接关系到整个减速着陆系统工作的成败。火星大气与地球大气环境相比,气候更加寒冷、空气更加稀薄,如何确保在这种环境下顺利实现开伞控制是一个关键。开伞控制方案的设计需要考虑到各种可能的进入轨道,包括标准进入轨道和各种偏差轨道,同时还要考虑到可供选择的控制方法和器件精度,确保减速着陆系统开伞以及开伞后各个程序动作均能及时、可靠地完成,避免开伞时温度过高、动压过大和开伞高度过低等情况发生。
有关研究表明,回收航天器常采用的开伞控制方法有纯时间控制法、传统的过载-时间控制法和静压高度控制法,但这些方法难以满足火星探测着陆系统的开伞要求[8-9]。美国“海盗号”采用的是雷达高度控制法[10],其他探测器大多采用自适应过载控制法。目前,对于新一代无人火星探测器而言,随着其质量不断增加,弹道系数增大,导致其进入轨道的超声速伞开伞区域进一步减小,要想实现正常的开伞控制,面临着更大的技术挑战。开伞控制方法是我国未来火星探测着陆系统设计中必须研究和解决的问题之一。
4.5 减速着陆过程控制技术
“凤凰号”及其之前的火星探测减速着陆任务大都使用无制导进入方式,着陆器初始状态的偏差及火星大气参数的不确定性使得着陆点偏差高达100~200km。
随着火星探测任务的发展,探测的目标开始向建立火星基地、采样返回及载人登陆火星的方向发展,需要将探测器及其有效载荷精确着陆到一定范围之内,比如,采样返回任务可能使用可分离的进入飞行器用于样品的收集和返回;载人探测可能需要将成员的进入飞行器着陆在居住点和补给点附近,这对探测器着陆精度有很高的要求。而目前的减速着陆技术,尤其是在接近火星表面的阶段处于不可控状态,探测器很难实现一定精度的着陆。因此,为了提高火星探测器着陆点的精度,需要对整个进入减速着陆过程进行制导、导航和控制,从而补偿初始的进入误差和大气环境导致的误差,提高着陆精度。目前,美国在这方面已开始进行了一些研究[11],其研究内容主要包括以下6个方向。
(1)用于火星精确着陆的先进高超声速进入制导技术
这项技术的目标是研制一个高超声速进入制导算法,可以满足未来火星减速着陆系统的需求。目前,火星着陆器的进入飞行器的升阻比较低,还是属于弹道式进入。今后的火星任务需要将体积更大、质量更大的有效载荷着陆到火星表面,这就要求研制出具有高升阻比的进入飞行器,完成升力式进入。针对这些要求,制导算法应能完成高超声速气动的进入计算。
未来的火星探测任务需要将不同时间的多个着陆器着陆到同一区域,并且需要在相同的推进控制方案要求下,使着陆精度达到100m左右,这就对制导计算方法提出了新的要求。此外,制导算法还应该在不改变进入器防热设计和结构设计的前提下,通过计算得到更加精确的降落伞展开条件,即降落伞展开的高度、速度等参数[12]。
(2)轨道器和着陆器结合的进入减速着陆(EDL)导航技术
过去火星着陆任务使用的都是无制导进入方式,着陆器的初始状态偏差和大气参数的不确定性使其着陆点偏差达到100km以上。研究表明,在进入阶段的导航功能可以通过利用轨道飞行器和着陆器之间的无线电通信来完成,通过使用火星着陆器和轨道器之间的无线电数据可以大大提高EDL的导航能力。
该项技术原本计划应用在“凤凰号”火星探测器上,但是最终没有实现。该技术主要是检验不同的天线设计,并且开发出一种天线,对其进行热防护系统试验,从而验证它在进入火星大气前后的性能。还将对其进行等离子干扰分析,以用来验证其在进入阶段可能发生的通信中断情况。此外,“凤凰号”探测器原计划还开发一个卡尔曼滤波器用于降低进入大气前后的导航状态数据错误。着陆器和轨道器之间的多普勒测距仪也将在EDL过程中得到使用。使用该项技术后,火星探测器的着陆精度达到10km以内[13-14]。
(3)利用在轨信标机的精确着陆导航技术
着陆精度在1km以内的着陆技术可以提高探测器的安全性,并且使其具有降落在预定区域的能力。进入器上面安装的信标机发出的实时导航数据可以将着陆器原来3km左右的着陆误差降低到500m以内。
使用信标机进行导航有利于2个航天器(如着陆器与轨道器)之间的通信连接,特别是在2个航天器之间的速度与无线电波束平行的情况下,可以实时确定着陆器的位置和速度。信标机提供的导航修正数据可以大大降低超声速降落伞的开伞高度误差,从而提高着陆器的着陆精度[15-16]。
(4)用于精确着陆的舱上自适应导航技术
这项技术的目的是开发一个稳定的自适应导航系统,用于在高超声速阶段主动制导着陆器的EDL系统,使其满足降落伞的展开条件,并最终安全着陆到火星表面。这个自适应导航系统可以处理惯性测量单元(IMU)和外部传感数据,然后得出一个着陆器自身的状态估计,并且考虑了IMU的失效问题和大气参数的不确定性。其主要工作内容是完成一种算法,用来在高超声速阶段和气动加热阶段,处理最终制导传感器(如高度计)测量的IMU数据[17]。
(5)图像与惯性制导结合的精确着陆导航技术
这项技术的工作重点是估计着陆器着陆点的精确程度,其目的是研究开发对于着陆器运动和姿态的实时估计方法[18]。
(6)火星可控降落伞技术
火星可控降落伞(MGP)是美国喷气推进实验室火星技术工程(MTP)的一部分。其目的是验证在下降阶段利用降落伞的风飘补偿(WDC)控制,提高着陆点精度技术的可行性。这项技术将在火星EDL过程的下降段中使用,可以将着陆精度提高到几十米的量级,并将用于未来的无人着陆和载人登火星任务[19]。
4.6 自主避障着陆技术
迄今为止,所有的火星探测着陆器都尚未具备自主避障的能力。然而由于火星表面分布有火山坑、岩石、沟壑等,这些特殊地形对于火星探测器的安全着陆,特别是未来火星基地的建立、采样返回及载人登火星来说是非常危险的。这就为未来的火星探测器提出了自主避障能力的要求。
自主避障着陆技术主要涉及以下3个方向:1)地形特性信息的采集和处理技术;2)地形安全性的识别技术;3)避障技术。
4.7 着陆缓冲技术
一般火星探测着陆器经降落伞减速后,接近火星表面时的稳定下降速度仍在55~90m/s左右,如果直接采用缓冲气囊或着陆支架等机械式缓冲装置进行着陆都难以实现。因此,在触地缓冲之前,必须采用反推发动机将着陆器的下降速度进一步减小,最后再采用缓冲装置进行缓冲着陆[1]。目前,工程上比较成熟的航天器着陆缓冲装置有反推发动机、缓冲气囊、机械式缓冲支架和吸收能量的易损结构等。而采用何种缓冲着陆方案要考虑工程目标、探测方式、着陆点条件、研制成本以及可靠性安全性等方面的因素[4]。
目前,已经在火星上成功应用的2种方案是着陆支架和缓冲气囊。着陆支架方案在“海盗号”上成功应用,该方案借鉴了当时月球探测器“勘测者”的着陆技术。“勘测者”、“海盗号”和“凤凰号”采用的是三支腿着陆支架方案,“阿波罗”载人登月舱和其他月球系列都是采用4条支腿进行着陆支撑。着陆支架一般由3根支腿组成:1个主承力支腿,2个侧向的辅助支腿。着陆支腿的构型有倒三角式和悬臂式2种,如图2所示。倒三角式结构和受力简单,但相比悬臂式结构,质量大,稳定性差,对着陆地形的适应能力较差。在缓冲吸能设计上,“勘测者”和“月球系列”均采用液压缓冲结构,而“海盗号”是采用铝蜂窝缓冲材料。液压缓冲具有很高的能量吸收效率,但缓冲性能容易受到温度等环境影响,且结构较复杂;铝蜂窝缓冲方式结构简单,性能比较稳定。
倒三角式是主支腿和2个辅助支腿在主支腿内筒下端的足垫附近相连接,构成三角锥杆系。优点是适合于承受集中载荷。悬臂式是指2个辅助支腿在主支腿外套筒下端与主支腿相连。这种形式的主支腿承受压缩和弯曲载荷,最大弯矩在副支腿的连接处,副支腿承受压力或拉力。

图2 着陆支架的构型
着陆支架方案的优点是其技术已在月球和火星着陆工程中被多次验证,容易与着陆器结构集成,能够承受很大的质量;缺点是受支架高度和稳定性的限制,对着陆点的地形要求高,火星表面不能有大的坡度、岩石和凹坑等特殊情况。采用支架后,火星探测器离地面有一定的高度,过高的着陆器重心会增大着陆时危险发生几率。为了保证着陆安全,需要配备大推力的制动发动机进行减速,将垂直着陆速度减小到2m/s左右,水平着陆速度小于1m/s。同时,为避免对着陆姿态产生干扰,发动机需要在触地前关机,因此,会导致着陆器自由落下,使着陆速度增大。另外,由于支架高度较高,需要采用某种手段将巡视器安全降落到火星表面。
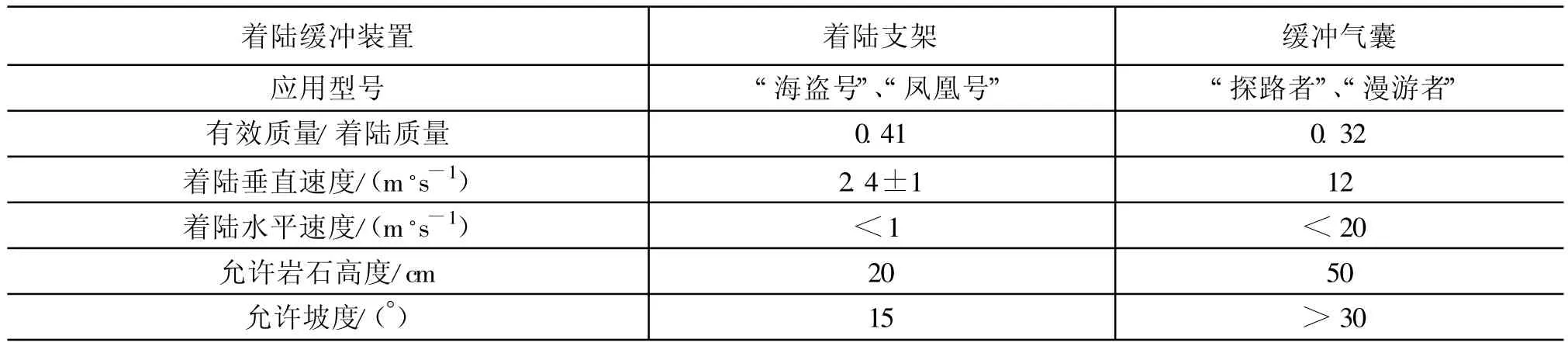
表2 着陆支架与缓冲气囊的比较
由于着陆支架方案的系统配置相对复杂,NASA在“探路者”、“漫游者”上采用缓冲气囊来实现缓冲着陆,并全部取得成功。缓冲气囊系统由4个气囊和气体发生器组成,气囊包裹着四面体结构的着陆器。由于探测器在进入火星大气时速度很高,首先需要利用飞行器的气动外形在高超声速阶段进行减速,当速度降低到Ma≈2时,降落伞展开工作,在距离地面一定高度后,利用反推发动机最后减速,然后释放包裹探测器的缓冲气囊,完成着陆缓冲。“探路者”首先采用了这种缓冲气囊的软着陆技术,其进入器直接进入火星大气层,在降落伞和反推火箭的协助下缓慢穿过稀薄的火星大气层,在距离地面100m左右时,“探路者”变为自由下落状态,并展开安全气囊,着陆后整个着陆器在火星表面弹跳,并慢慢平稳。平稳后,气囊放气,着陆器舱壁板展开,放出火星漫游车。
气囊的优点是简化了着陆系统的设计,可以以较大的速度进行着陆,对着陆姿态没有太多的要求,更适应相对复杂的着陆地形。缺点是气囊结构相对有效载荷质量较大,适合着陆质量小于1 000kg的着陆器。另外,由于受到承担的有效载荷的质量限制,全向气囊方案不适合将来的取样返回和载人登火星计划。
目前,NASA正在加紧研制新的火星着陆技术,例如原计划2010年将发射的“火星科学实验室”,其要求着陆点海拔高度1km,着陆器质量800kg,着陆精度为10km。为了满足这些要求,“火星科学实验室”设计了不同于以前的着陆缓冲方案——“空中吊车”(Sky Crane)精确着陆技术,如图3所示。

图3 “空中吊车”精确着陆技术
在该项技术中,由“空中吊车”直接将漫游车送到火星表面,无需安全缓冲气囊。主要工作原理是:探测器在大约离地面1 500m处动力下降段和后体分离,8个制动发动机点火工作,同时有8个小推力姿控发动机进行俯仰、滚动、偏航控制;在下降到离地面19.5m时,动力下降段的垂直速度减小到0.75m/s,水平速度为0,动力下降段通过3根吊带释放漫游车,吊带长7.5m;同时,动力下降段以0.75m/s的速度匀速下降,直到漫游车触地。漫游车着陆后切断吊带,动力下降段飞离摆脱着陆点。漫游车在着陆时靠6个车轮进行缓冲,类似汽车的减震设计,保证能以小于1m/s的垂直速度、0.5m/s的水平速度着陆在15°的斜坡上。这种着陆方式可使漫游车着陆在20~40km范围的区域,比以前探测器在火星的着陆范围缩小了很多[20]。
5 结束语
通过对目前国外火星探测器减速着陆技术的分析,可以发现,火星着陆的着陆精度要求越来越高,着陆有效载荷的质量越来越大,着陆过程的可控性越来越强,着陆方式越来越多。因此,我国应加紧对火星探测器减速着陆系统中的一些关键技术或环节进行研究,在充分研究关键技术的基础上,提出符合我国实际情况的火星探测器减速着陆系统方案,为进一步开展我国对火星探测的研究奠定基础。
[1]高滨.火星探测器着陆技术[J].航天返回与遥感,2009,30(1):1-9.
[2]荣伟,雷江利,姜毅,等.火星探测器减速着陆系统方案概述[C].中国空间技术研究院返回与回收专业组2009年学术交流会论文集,2009.
[3]Grover M R,Cichy B D,Desai P N.Overview of the phoenix entry,descent,and landing system architecture[R].AIAA 2008-7218,2008.
[4]Braun R D,Manning R M.Mars exploration entry,descent,and landing challenges[R].AIAA 2005-5915,2005.
[5]AllenW,Walter M,Yaro T.Mars subsonic parachute technology task system overview[R].AIAA 2005-1657,2005.
[6]Mitcheltree R,Bruno R,Slimko E,et al.High altitude test program for a mars subsonic parachute[R].AIAA 2005-1659,2005.
[7]Harold N M,Clinton V E.Low and high altitude tests of parachutes designed for use in low density atmospheres[R].AIAA 1970-1164,1970.
[8]荣伟.火星探测器减速着陆技术研究[D].中国空间技术研究院博士学位论文.北京:中国空间技术研究院,2008.
[9]荣伟,陈旭,陈国良.火星探测着陆系统开伞控制方法研究[J].航天返回与遥感,2007,28(4):6-11.
[10]Ewing E G,Bixby H W,Knacke T W.回收系统设计指南[M].吴天爵,马宏林,吴剑萍,等译.北京:航空工业出版社,1988.
[11]Cheng-Chih Chu,Samad A H,Udomkesmalee S.Mars base technology program overview[R].AIAA 2005-6744,2005.
[12]Tim B,Linda F,Dave G,et al.GN&C technology needed to achieve pinpoint landing accuracy at mars[R].AIAA 2004-4748,2004.
[13]Burkhart P D,Ely T,DuncanC,et al.Real-time EDL navigation performance using spacecraft to spacecraft radiometric data[R].AIAA 2006-6566,2006.
[14]Burkhart P D,Ely T,Duncan C,et al.Expected EDL navigation performance with spacecraft to spacecraft radiometric data[R].AIAA 2005-5949,2005.
[15]Ely T,Duncan C,Lightsey E,et al.Real time mars approach navigation aided by the mars network[R].AIAA 2006-6565,2006.
[16]Lightsey E G,Campbell T,Mogensen A,et al.Expected performance of the electra transceiver for mars missions[R].AIAA 2005-5948,2005.
[17]Matra O D,BishopH R.Multi-model navigationwith gating networksfor marsentry precision landing[R].AIAA 2004-5279,2004.
[18]Cheng Y,Ansar A.Landmark based position estimation for pinpoint landing on mars[C].2005 IEEE International Conference on Robotics and Automation(ICRA),2005.
[19]Anthony P T,McKinney J,Brown G.Mars guided parachute system[R].AIAA 2006-7430,2006.
[20]Way D W,Steltzner A D,Sell S W,et al.Mars science laboratory entry,descent,and landing system overview[C].2006 IEEE Aerospace Conference,2006.
猜你喜欢
英语世界(2022年5期)2022-05-18
空间科学学报(2021年2期)2021-07-21
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
小溪流(画刊)(2017年11期)2018-01-09
北京航空航天大学学报(2017年4期)2017-11-23
创新作文(1-2年级)(2016年12期)2016-12-26
中学科技(2015年7期)2015-07-03
高中生·青春励志(2014年11期)2014-11-25
航天器工程(2014年4期)2014-03-11