考虑驾驶员个体特性的汽车安全行驶间距模型
2010-06-04 09:15:22边明远
中国机械工程 2010年12期
边明远
清华大学汽车安全与节能国家重点实验室,北京,100084
0 引言
交通事故已成为现代社会的一大公害。据统计,汽车碰撞事故约占全部交通事故的60%~70%。而汽车碰撞事故大多是因为行车速度过快、行车间距过小、刹车不及时等因素造成的[1]。资料显示,有70%~90%的交通事故是由于驾驶员操作失误所致[2]。汽车主动避撞系统能够在事故发生前提醒驾驶员注意并在紧急状况下自动采取安全措施。
汽车行驶安全状态判断是汽车主动避撞系统功能实现的基础,而其核心内容之一是提出有效的安全车距模型。
从提高汽车主动避撞系统实用性出发,安全距离模型要保证多数交通情况下主动避撞系统正常工作,减小由于误判断造成误操作的可能性。在保证安全的基础上,应以实际交通情况下驾驶员的驾驶特点作为安全距离模型建立的基础。
具有不同经验技能的驾驶员对安全跟车车距有不同的衡量标准,而驾驶员不同的身体及心理状况等个人因素,以及路况、天气、行车环境等都对车辆安全行驶状态的判别有影响。因此,作为车辆行驶安全状态判断标准的安全车距模型也必须同时反映出人、车、行驶环境状态的差异,使车辆防碰撞安全预警系统能满足不同驾驶员的个性化特征或驾驶状态,这样才能降低避撞系统的虚警率、误警率,在促进交通安全的同时提高交通效率。
本文在总结国内外关于主动避撞安全车距模型研究的基础上,分析了影响跟随车辆减速避撞操作的人的各种因素,提出了一种考虑驾驶员个体特征的安全行驶车辆间距模型,并通过不同行驶工况下的仿真及对比分析验证了模型的有效性。
1 基于车辆制动过程的安全距离模型
在主动避撞系统安全车距模型和车辆安全行驶状态的判别方面,国内外进行了广泛的研究,但基本上都是参照理论上的安全跟车距离模型,较少考虑人的因素、车辆因素和环境因素对车辆安全行驶状态界定的影响,因此,往往会出现系统虚警率较高、可靠性不太高等问题。
下式为基于车辆制动过程运动学分析的安全距离模型[3-7]:

式中,v1、v2、a1、a2分别为自车及前车的速度及制动减速度;d0为两车静止时应保持的最小安全距离;tx为自车制动系统协调时间,对于采用液压制动系统的车辆,一般为0.2s;thum为驾驶员的制动反应时间,包括驾驶员看到危险报警信号的心理及生理反应、判断决策以及采取相应动作的时间,是驾驶员辨认行车情况并采取刹车动作的临界反应时间。
式(1)是主动避撞系统采用较多的行驶安全状态判定标准,它适用的典型交通情况是跟随行驶过程中前方车辆突然制动(减速)至停止这种极端工况,模型建立时仅考虑了保证车辆行车安全的要求,没有考虑道路交通效率方面的因素,因而利用该模型确定的安全距离趋于保守。同时,该模型建立过程中一个重要的参数 ——驾驶员制动反应时间,在国内外众多的模型研究中都无法精确地选取,只能设定一个大致的范围,约为0.3~2.0s,有的设为0.8~1.3s,这样就必然造成所推导出的安全车距模型存在较大的误差。
主动避撞系统的实质是搜集车辆及行驶环境的实时信息,对车辆的行驶安全状态进行判别,给驾驶员提供安全报警和决策辅助,在驾驶员不能够正确操作或决策时自动对车辆进行控制,保证行车安全。因此,作为核心的安全车距模型也往往据此分为提醒报警距离d w和极限报警距离d b两个级别。其中,提醒报警距离应保证驾驶员有较充足的反应时间,并能进行正确的习惯操作。而极限报警距离则设定为非保守型,一方面是因为考虑到驾驶员已处于高度警惕状态并做好了刹车准备,此刻不需要再加上驾驶员的反应时间,而只需考虑制动协调时间即可;另一方面,既要防止出现频繁报警影响驾驶员的正常操作,又要分析车辆在不同运动状态下的最危险时刻,保证在最危险时刻两车间尚能保持安全距离db[8]。
根据文献[8]的研究,设某一时刻在同一车道上行驶的2辆车辆,当自车发现前车紧急制动或减速而判断存在危险倾向时,采用的两级报警距离分别为

所以两级报警车距存在如下关系:

由上述安全车距模型可以看出,在车辆提醒报警距离d w的确定过程中,自车的运动状态和驾驶员的反应时间对模型的结果影响很大,而驾驶员的反应时间除了因驾驶员个体的驾驶经验和技巧而各异外,还与驾驶员当时的生理、心理状态,以及道路状况、天气状况等行驶环境信息有关。除此之外,车辆应保持的最小安全距离d 0实际上也应该随着驾驶员反应操作能力的差异而相应改变。
文献[1]分析了人、车、路等因素对安全车距模型确定的影响,并采用加权因子的方法对常规报警安全车距模型进行了修正,但并未区分极限报警安全车距与驾驶员提醒报警安全车距模型,也未充分考虑驾驶员个体特征及驾驶环境等因素对构成这两种车距模型的各部分参数的影响,而仅用一个加权因子乘以常规跟随安全车距,其修正后的车距模型显然是具有很大的局限性的。
2 基于驾驶员个体特征修正的安全车距模型
众所周知,“人、车、环境”是行车安全保证的三个基本要素,所以车辆安全车距的模型要能够反映这三个基本要素的变化。具体某车辆而言,“车”的因素相对稳定,所以本文重点研究“人、环境”对安全车距的影响,而环境的变化又往往通过对“人”的个体特征的影响表现出来。
不同驾驶员个体特征的差异主要包括驾驶经验和技巧、年龄、生理及心理状况等影响驾驶员对车辆操控能力和面对异常交通状况时的反应、判断和决策能力的个人状态,而驾驶环境对驾驶员个体特征的影响或干扰主要体现在由于驾驶视野的变化而造成的使驾驶员反应和判断能力的衰减。所以,要真实地反映实际驾驶工况的安全车距,必须体现以上因素的影响。
大多数安全跟车距离计算模型的推导过程一般是基于驾驶员类型、车辆状况、自然环境、路况4个指标评估值均为一般值的情况下的车辆安全制动距离,模型中往往采用一个固定的制动反应时间和最小安全距离值。但是,如前所述,不同类型的驾驶员(有经验的驾驶员、一般驾驶员、新手驾驶员),不同的生理状态(状态良好、疾病、疲劳等),不同的心理状态(情绪良好、低落、烦躁等),不同的行驶状态(低速、中速、高速等)、不同的行驶自然环境(雨天、雾天、冰雪天气、白天、夜间等),对驾驶员的反应能力、对安全跟车距离的要求都有或多或少的影响。如果将一般的安全跟车距离计算模型应用于实际的车辆防碰撞系统中,那么对于同样的车辆,在行驶过程中,一个具有丰富驾驶经验和很好反应能力的司机,他会感觉到系统设定的安全跟车距离过大,一方面频繁的不必要的报警提醒可能会使司机关掉系统,另一方面车辆在这种状态下行驶会在一定程度上影响道路交通能力、降低运行效率;而对于一个新手驾驶员,他反而会觉得系统所设定的安全跟车距离过小,对他来说这个安全距离并不安全,系统的报警提醒时间并不及时。另外,对于相同技能的驾驶员,个人状态良好时,他可能会感觉系统所设定的安全跟车距离过大,而在个人生理或心理状态较差时,他可能会感觉到系统所设定的安全跟车距离过小,这些都不利于行车安全和高效运行。再者,在不同行车环境中,驾驶员对安全跟车距离的需求也会有一定差别。因此,基于驾驶员个体特征并反映驾驶环境情况的安全车距模型才能够充分保障主动避撞系统的有效运行。
本文采用综合加权评定的方法,以普通的驾驶员及一般驾驶工况为基准,对影响驾驶员反应能力的各种因素进行分析,对驾驶员的动态反应能力和适应的安全车距模型进行分析。
2.1 驾驶员制动反应时间及最小安全车间距修正模型
在同车道的车辆跟随行驶过程中,当跟随车辆的驾驶员看到前方车辆突然制动或减速时,往往要经过一系列的反应或动作过程,然后才能对车辆进行操控以避免追尾碰撞事故的发生。这个过程包括对前方车辆减速信号的观察、前后车辆相对速度变化的对比、对未来时间前后车辆运动状态的判断、脚从油门踏板上放松及离开、脚踩上制动踏板并施加制动压力等。在这个过程中,车辆维持其原来的运动状态,其耗时称为驾驶员的制动反应时间,随驾驶员个体及状态的差异而不同。而驾驶员踩完制动踏板之后车辆制动系统还会有一个动作响应的延迟,时间长短由制动系统的型式决定。
由于跟随车辆在执行减速制动之前车速一般较高,所以制动反应时间的长短对安全车距的值影响较大,是避撞系统安全车距模型中一个重要的参数。如上所述,驾驶员制动反应时间随“人、车、环境”因素的变化而变化,因此,车距模型也必须进行相应的修正才具备良好的适应性。
一般来说,影响驾驶员反应能力的人的因素可以分为业务技能(驾龄)、年龄、生理状况、心理状态四大方面,而环境因素的影响主要为正常天气、雨雪天气、雾尘天气三方面加上昼夜环境等对驾驶员视野的影响。
以百分制为基础,对以上影响制动反应能力的各种指标进行打分评估,因而可以形成对驾驶员反应时间进行评估的状态向量:

假设上述各评价指标对驾驶员反应能力影响的权重指标为w,则各权重指标形成的权重向量为

采用综合加权法构造以上各因素对驾驶员反应能力影响评估的函数,则有

上述评估函数y的结果体现为一个考虑各种因素的百分制的评估值,以普通驾驶员状态指标为基础,参考文献[1],确定基于函数值y的驾驶员反应能力的修正因子为

参考多数文献的研究成果[9-11],取一般驾驶员正常状态下的制动反应时间t hum=1.25s,而驾驶员需求的最小停车安全间距d0=2.5m,则基于修正因子k的驾驶员制动反应时间和需求的最小停车安全间距的修正模型为

式中,tff为修正后的驾驶员反应时间;ds为修正后的最小停车安全间距。
2.2 基于驾驶员个体特征的安全车距修正模型
在主动避撞系统的两级安全车距模型中,报警安全车距的目的是提醒驾驶员针对将要发生的碰撞事故采取相应的规避操作,因此驾驶员个体特征的差异必然会对该模型值的大小有不同的要求;而极限安全车距则为跟随车辆针对即将发生碰撞的极限状态而要求车辆控制系统自动执行规避动作的前后车距离,该模型更多地是与车辆及运动状态相关,受驾驶员因素影响较小。基于以上分析,考虑驾驶员个体特性差异的主动避撞系统的两级安全车距修正模型分别为

该两级报警车距存在如下关系:

3 基于驾驶员个体特征安全车距模型的验证
根据对相关资料的分析以及对多名不同类型驾驶员样本的调查,确定了一组关于驾驶员驾驶经验X 1(权重系数w 1)、驾驶员年龄X 2(权重系数w2)、驾驶员身体状况X 3(权重系数 w3)、驾驶员精神状况X4(权重系数w4)、由驾驶环境引起的驾驶员视野状况X5(权重系数w 5)等5项影响驾驶员制动反应能力的评估指标的权重两两比较的比值,并由此计算出权重向量并进行归一化处理。假设不同个体状态的驾驶员在不同前后车跟随行驶工况下进行减速避撞操作,对以上过程进行了仿真,仿真结果如图1~图6所示。
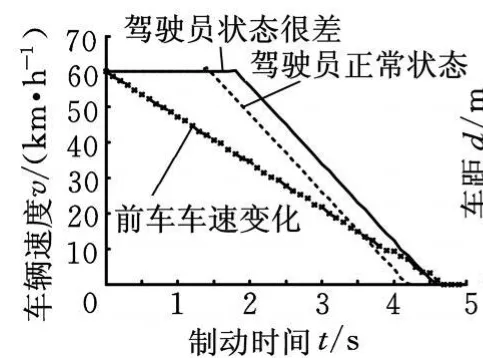
图1 驾驶员状态很差情况下的跟随车制动反应情况
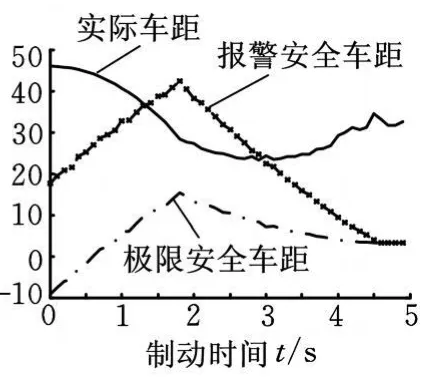
图2 驾驶员状态很差情况下的安全车距模型

图3 驾驶员正常状态下安全车距模型

图4 驾驶员状态很好情况下的跟随车制动反应情况

图5 驾驶员状态很好情况下的安全车距模型

图6 驾驶员正常状态下安全车距模型
图1 ~图2示出了驾驶员个体状态较差情况下前后车辆跟随行驶的情况。前后两车均以60km/h的初速度在良好路面上行驶,初始前后车距为46m,后车的驾驶员为新手,驾驶经验不足,同时其生理状态和心理状态都不佳,驾驶环境的视野也很差。在行车过程中前车突然以3.5m/s2的减速度行驶,后车为了避免发生碰撞事故随即采取制动减速操作。从图1可以看出,普通驾驶员在正常状态下经过约1.25s的反应时间后后车随即采取制动减速措施,而状态很差的驾驶员的反应时间较长,达到了1.62s,导致后车的制动操作延迟。从图2可以看出,由于驾驶员制动反应时间过长而导致制动操作有较大延迟,所以需要的报警安全车距也更大,因此在后车跟随行驶的过程中,在1.3~2.9s之间,前后两车的实际车距小于报警安全车距而引发避撞系统报警。而在图3所示的常规安全车距模型中,由于普通驾驶员的制动反应时间(1.25s)与状态较差的驾驶员相比较小,所以其需要的报警安全车距值也较小,在整个行车过程中都小于前后车的实际车距,因而不会发生报警。但就图2及图3比较来看,两者的极限安全车距的大小非常接近,显示该距离模型受驾驶员个体特性因素影响较小。
图4~图5示出了驾驶员个体状态很好情况下前后车辆跟随行驶的情况。前后两车均以60km/h的初速度在良好路面上行驶,初始前后车距为42m,后车的驾驶员驾驶经验丰富,同时其生理状态和心理状态均很好,驾驶环境的视野也很好。在行车过程中前车突然减速,以3.5m/s2的减速度行驶,后车为了避免发生碰撞事故随即采取制动减速操作。从图4可以看出,普通驾驶员在正常状态下经过约1.25s的反应时间后后车随即采取制动减速措施,而状态很好的驾驶员的反应时间则较短,约为了1.09s,因此后车的制动操作更加敏捷。从图5可以看出,由于驾驶员制动反应时间较短且制动操作快捷,所以需要的报警安全车距也较小,在整个行车过程中都小于前后车的实际车距,因而不会发生报警。而在图6所示的常规安全车距模型中,由于普通驾驶员的制动反应时间(1.25s)与状态良好的驾驶员相比较大,所以其需要的报警安全车距值也较大,因此在后车跟随行驶的过程中,在1.4~1.5s之间,前后两车的实际车距小于报警安全车距引发避撞系统报警。但就图5及图6比较来看,两者的极限安全车距的大小非常接近,显示该距离模型受驾驶员个体特性因素影响较小。

图7 普通驾驶员不同生理和心理状态下安全车距模型
图7 示出了驾驶员不同生理和心理状态下前后车辆跟随行驶的情况。前后两车均以60km/h的初速度在良好路面上行驶,初始前后车距为45m,后车为普通驾驶员,驾驶环境的视野一般,在行车过程中前车突然减速,以3.5m/s2的减速度行驶,后车为了避免发生碰撞事故随即采取制动减速操作。由图7可以看出,无论是在驾驶员生理状况还是心理状况较差的情况下,所需的报警安全车距模型的值都要比正常状态时偏大;但在驾驶员生理状况较差的情况下报警安全车距的值比正常状态有较大的偏差,而驾驶员心理状况较差的情况下报警安全车距的值比正常状态虽也有差距,但不太明显,表明就生理与心理这两种驾驶员个体因素而言,驾驶员的生理状况差异对其反应能力和报警安全车距模型的影响更大。而在上述两种情况下,极限安全车距的差距依然不明显,受驾驶员个体因素影响较小。
4 结论
(1)作为主动避撞系统安全车距模型中的一个重要参数,驾驶员的制动反应时间受到驾驶经验、驾驶员年龄、生理和心理状况、驾驶员视野等诸多个体因素的影响,相应地,安全车距模型也应该随驾驶员个体特性的差异而进行修正。
(2)运用综合加权的方法分析了驾驶员个体因素对安全车距模型参数的影响,获得了参数评估函数的状态向量和权重向量,提出了基于修正因子的考虑驾驶员个体特性差异的避撞系统安全车距修正模型。
(3)通过不同行驶工况下的仿真验证了提出的安全车距修正模型对不同驾驶员个体状态的适应性。分析说明了驾驶员个体特性的差异主要影响报警安全车距,对极限安全车距的影响较小。
(4)驾驶员个体的生理与心理状况两种因素中,生理状况因素对于安全车距模型的影响更大。
[1] 陈德海.真实环境下车辆行驶安全性综合评价及防碰撞系统研究[D].赣州:江西理工大学,2007.
[2] Yi Kyongsu,Woo Minsu,Kim Sung Ha,et al.An Experimental Investigation of a CW/CA System for Automobile Using Hardware in the Loop Simulation[C]//Proceedings of the American Control Conference.San Diego,California,1999:724-728.
[3] 李晓霞,李百川,侯德藻,等.汽车追尾碰撞预警系统研究[J].中国公路学报,2001,14(3):93-95.
[4] 杨伟,徐杰,李宗平.高速公路上跟随车安全距离的一种确定方法[J].四川工业学院学报,2001,21(1):20-22.
[5] 马骏.高速公路行车安全距离的分析与研究[J].西安公路交通大学学报,1998,18(4):90-94.
[6] 王文清,王武宏,钟永刚,等.基于模糊推理的跟驰安全距离控制算法及实现[J].交通运输工程学报,2003,3(1):72-75.
[7] 徐杰,杜文,孙宏.跟随车安全距离的分析[J].交通运输工程学报,2002,2(1):101-104.
[8] 肖梅.高速公路追尾碰撞预防报警系统再研究[D].西安:长安大学,2003.
[9] Genya A,John R.Alarm Timing,Trust and Driver Expectation for Forward Collision Warning Systems[J].Applied Ergonomics,2006,37:577-586.
[10] Zhang Yizhen,Erik K A,Karl G.A New Threat Assessment Measure for Collision Avoidance Systems[C]//Proceedings of the IEEE ITSC 2006,2006 IEEE Intelligent Transportation Systems Conference.Toronto,2006:968-975.
[11] Nakaoka M,Pongsathorn R,Nagai M.Study on Forward Collision Warning System Adapted to Driver Characteristics and Road Environment[C]//International Conference on Control,Automation and Systems 2008,in COEX.Seoul,2008:2890-2895.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
汽车实用技术(2022年4期)2022-03-07 03:47:54
科学与财富(2021年33期)2021-05-10 11:56:08
莫愁·时代人物(2018年7期)2018-09-12 11:19:18
莫愁(2018年20期)2018-07-19 08:44:52
汽车零部件(2018年5期)2018-06-13 08:42:18
电子测试(2018年1期)2018-04-18 11:53:56
公民与法治(2016年4期)2016-05-17 04:09:26
中国信息技术教育(2014年1期)2014-04-29 09:44:12