轴流式磁悬浮人工心脏泵驱动电机的研究
2010-06-04 09:14刘淑琴
中国机械工程 2010年8期
杨 晟 刘淑琴 关 勇
山东大学,济南,250061
0 引言
磁悬浮轴承由于其具有无接触、无摩擦和无润滑等优点,很好地满足了人工心脏的多种苛刻要求,能够解决使用传统轴承支撑的人工心脏设计中轴承对血液的碾压造成对血细胞的破坏以及轴承的密封等问题。所以磁悬浮轴承日益成为人工心脏泵研究领域的热点[1]。而泵的驱动问题是人工心脏泵的关键。目前,人工心脏泵的驱动电机国内主要采用直流电机或带变频装置的永磁同步电机。这些电机具有结构简单、输出转速高等优点[2-5],但都含有电枢齿槽,使其在转矩波动、运行平稳性、噪声、电枢电感、定位干扰力矩、径向尺寸等指标上略显不足。由于人工心脏泵事关病人的生活品质甚至生命安全,这就要求设计人工心脏泵时,在满足基本的高可靠性和高稳定性以及高的模拟活体心脏功能的逼真性的基础上,应逐步减小体积、降低噪声、改善运行性能。笔者设计了一种新型的人工心脏泵电机——永磁无槽直流无刷电动机。它采用了Microlinear公司生产的直流无刷电机专用芯片ML4425作为主控芯片,利用反电势法检测转子位置,通过IR2130控制开关管的导通,在电机气隙磁场内形成跳跃式的脉振旋转磁场,从而驱动电机和叶轮旋转。限于篇幅,本文不讨论反电势与转子位置间的逻辑运算关系和磁悬浮支撑的相关内容。
1 磁悬浮人工心脏泵及电机结构
1.1 磁悬浮心脏泵总体结构
设计的磁悬浮人工心脏泵的结构如图1所示。图中的心脏泵转子由两个组合式永磁被动径向磁轴承和一个永磁偏置主动控制轴向混合磁轴承实现完全的悬浮,转子四周除血液外没有任何的接触物质。心脏泵转子的位置将由内置式霍尔位移传感器实时监测,并通过外部的主动磁悬浮支撑控制系统实现位置的控制。
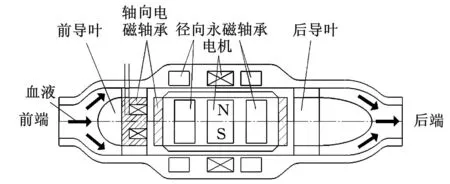
图1 磁悬浮人工心脏泵的结构图
驱动电机安装在心脏泵的中部,电机的定转子与血液接触部分用医用钛合金包裹,转子与磁轴承的转动部分组装为一体,电机转子在定子旋转磁场的作用下,将携带组合转子一同旋转。
1.2 驱动电机结构
心脏泵电机是由两个独立的定子和转子组成的无电刷、无传感器、无齿槽的永磁无槽无刷直流电动机,其结构如图2所示。加工完成的定子绕组如图3所示。本文研究的无槽电机由一个杯形绕组、两个定转子铁心和一个圆环形永久磁铁组成。在图2中,A、B、C三相绕组对称均匀分布成两层,每层每相绕组占据 120°的角度,每匝线圈跨过一个极距,绕组接线方式为星形。图2中间部分为圆环形永久磁铁(电机转子),采用Nd2 Fe14B材料,沿径向上某个方向平行充磁,极对数为2。电机定转子铁心均采用导磁性能好的电工纯铁。
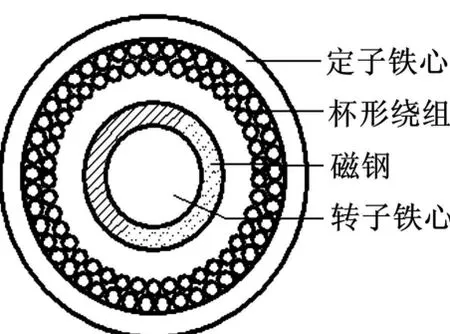
图2 电机截面图

图3 定子绕组
2 驱动系统设计
2.1 电机驱动原理[6]
磁悬浮人工心脏泵驱动电机采用两相导通星形三相六状态的运行模式。运行时,主控芯片根据定子绕组反电势判断转子位置,在换相时刻准确发出下一个时序的激励信号,使6个时序状态交替变换,三相绕组两两导通,形成脉振旋转磁场,从而带动电机转子旋转。
图4所示为永磁无刷直流电动机框图。永磁无刷直流电动机的基本构成包括电动机本体、控制器、转子位置检测器、逆变器、电源五部分。转子位置检测装置通过反电势法检测电机转子位置,将信号输送给控制器,控制器根据位置信号控制逆变器开关管导通,从而控制电机三相绕组的通断,驱动电机转子旋转。
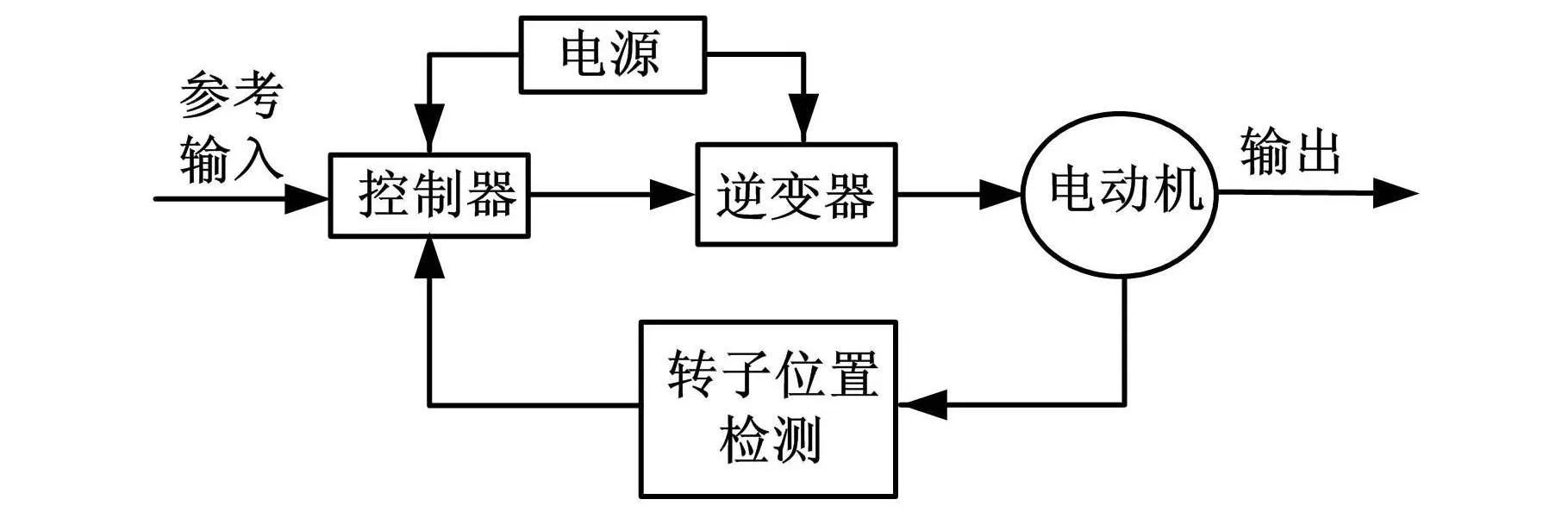
图4 永磁无刷直流电动机框图
图5 所示为理想反电势及相电流波形,此波形显示了电机三相绕组的导通顺序。电机工作原理如图6所示,当转子永磁体位于图6a所示的位置时,根据反电势法得到的转子位置信号,经过控制电路和逆变器,使绕组A、B相通电。这时A相电流为正向流进,B相电流为反向流出,电枢绕组在空间的合成磁动势F a与励磁磁动势F f之间的夹角为120°电角度。在定转子磁场相互作用下产生顺时针方向的电磁转矩,该转矩拖动转子沿顺时针方向转动。依次类推。
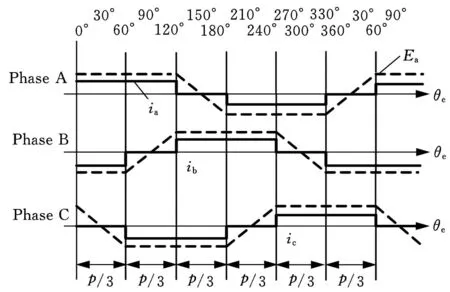
图5 理想反电势及相电流波形
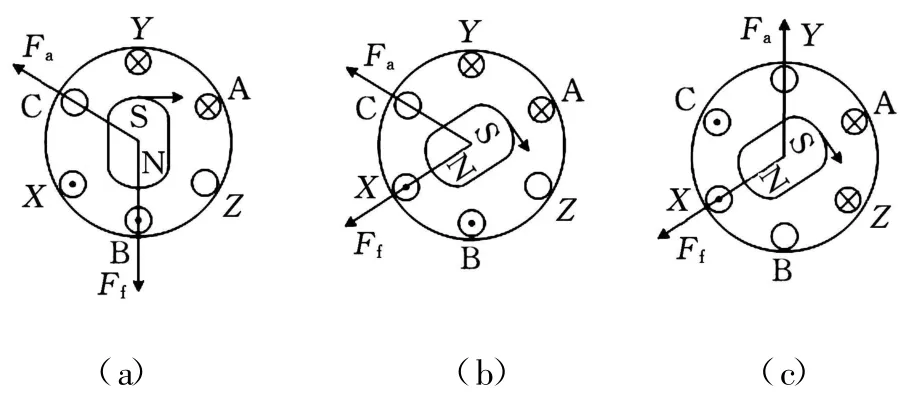
图6 电机工作原理示意图
2.2 驱动电路结构原理[7]
硬件电路部分采用 ML4425、IR2130、HCF4069等芯片组成方波产生与调频及开关管驱动电路,其驱动控制系统原理框图如图7所示。
ML4425内部含有压控振荡器(VCO)、PWM速度控制器、高端栅极驱动器、低端栅极驱动器、PWM电流控制器、换向控制器、反馈取样电路等单元。另外还能实现欠压锁定、温升控制、电流限制、报警等功能。芯片整个运行状态可分为 3种[7]。先是复位校准状态,此时两个上桥臂和另外一个下桥臂导通,电机转子在磁力线的作用下转动到某相绕组中心线位置;定位完成后,片内压控振荡器开始起振,系统进入开环升速状态;电机转速升至可产生足够大的反电动势后,系统进入闭环换相状态。在此期间,当20脚SPEED FB接近 8脚SPEED SET设定电压时,电机进入PWM稳定控制状态,通过调节线圈供电电压对电机进行速度控制。图8所示为ML4425芯片管脚图。
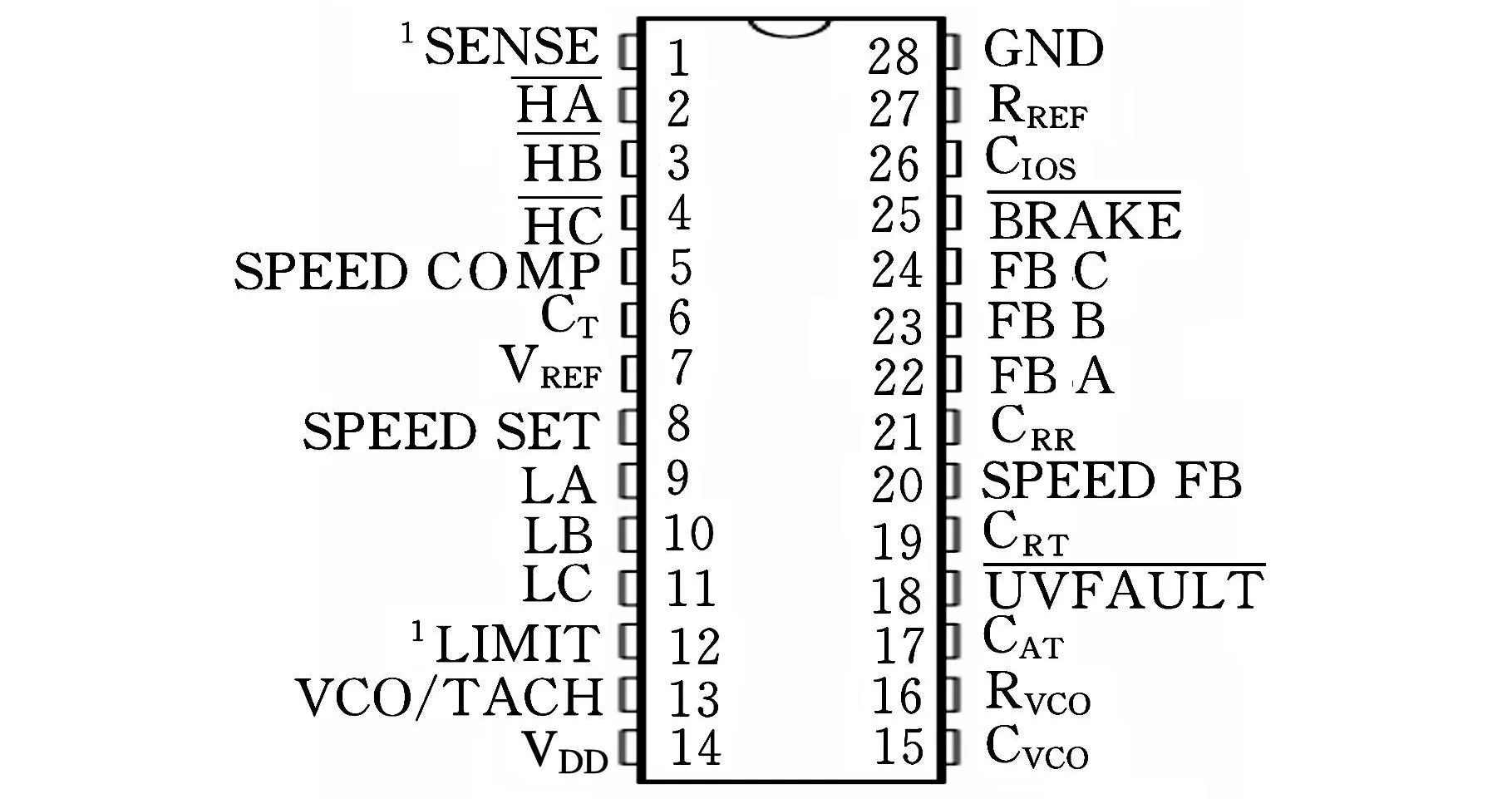
图8 ML4425管脚图
电机驱动电路由IR2130和MOSFET开关管组成。从ML4425出来的相差120°的方波信号,经反相器 HCF4069反相,输入给 IR2130。IR2130直接控制三相全桥开关管,进而驱动电机。
人机接口界面主要有电源开关、工作指示灯、转速显示窗口及转速调节旋钮。
3 关键技术分析与参数确定
电机额定容量为10W;额定电压为15V;磁极对数为1;因电源电压高于ML4425芯片规定的电机电压,所以外加了N沟道功率MOSFET栅极缓冲驱动电路。图9所示为电机速度闭环系统框图。
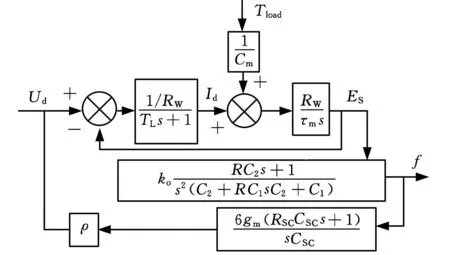
图9 速度闭环系统框图
3.1 环路滤波器参数计算
环路滤波器由R和C 2串联支路与C1并联组成二阶低通滤波器接在ML4425的20脚。其参数如下:
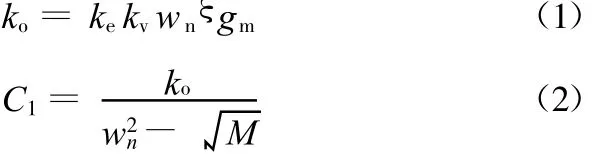
式中,ko为整个滤波电路传递函数系数;ke为反电势常数,V/(rad◦s-1);kv为VCO增益,rad/V;ξ为采样时的阻尼分压系数;gm为跨导放大倍数,A/V;wn、wz分别为电机额定旋转频率和滤波网络零点频率,通常取wz=wn/ M,M=10。
3.2 启动电路参数计算
转子定位电容参数为

通常优先选取1μF的电容,t s为定位时间,s。
转子加速时间电容参数为

式中,J为转子转动惯量;IMAX为电机启动时线圈中的电流,A;p为电机极对数。
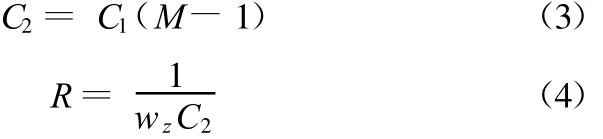
3.3 速度闭环补偿参数计算
式中,wp为滤波网络极点频率;τm为机械时间常数,s;RW为绕组电阻,Ω。
4 实验数据及结果
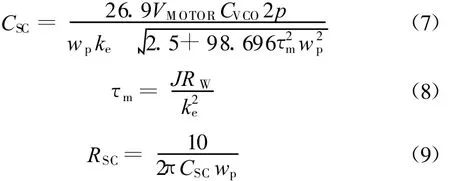
该电机的实验采用的驱动电压U s调节范围为9~25V,如图10所示。在转子稳定悬浮的状态下,开启电机控制器,实现电机的闭环锁相稳定旋转。在驱动电压调节范围内调节绕组线圈的供电电压,能够实现转速的平滑调节。通过示波器读取ML4425输出脚的激励信号,可以得到电机的驱动信号频率,从而可以得到转子转速n。实验测得的HA 脚的输出信号如图10所示(驱动电压为9V、15V、20V、25V),电压 —驱动频率 — 转速对应关系如表1,由此得到的n-Us调速曲线如图11所示。
实验结果表明,系统以较高的精度实现了闭环稳定运行,旋转平稳,噪声低,抗干扰能力强,调速曲线近似一条直线,满足了心脏泵的各项性能指标要求。
5 结束语
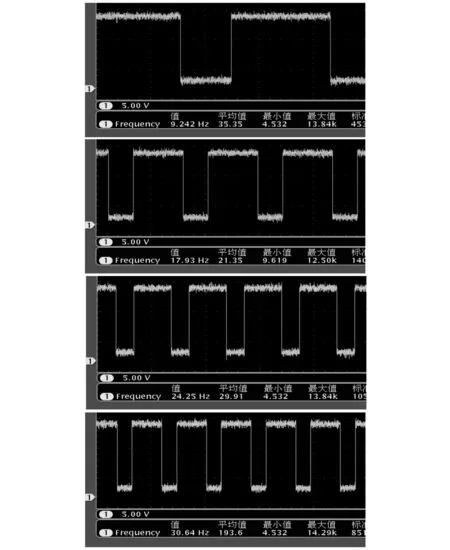
图10 HA脚在不同驱动电压(从上到下依次为9V、15V、20V、25V)下的输出信号

表1 实验数据
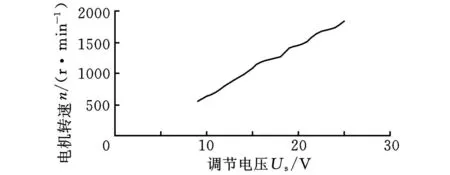
图11 电机调速曲线
本文介绍了一种应用于轴流式磁悬浮轴承心脏泵的新型电机,在基于ML4425的控制器作用下,能够实现快速平滑调速。这种电机具有噪声低、运行平稳、抗干扰能力强、体积小等诸多优点。本文中关于ML4425控制器关键参数的确定方法具有通用性,同样可以作为其他应用场合时的设计思想。
[1] 刘淑琴,边忠国,李红伟,等.磁悬浮轴承人工心脏泵的研究[J].中国科技成果,2009(4):14-16.
[2] 陈建伟,谭建平,龚忠良,等.微型轴流式血泵外磁驱动电路设计[J].微计算机信息,2005,21(2):88-89.
[3] 龚中良,谭建平,李国荣.基于血泵驱动外磁场产生方法的研究[J].生物医学工程研究,2004,23(4):201-203.
[4] 曾培,茹伟民,袁海宇,等.人工心脏血泵驱动电机的控制研究[J].中国生物医学工程学报,2001,20(4):342-345.
[5] 沈建新.永磁无刷直流电动机特殊绕组结构及无位置传感器控制的研究[D].杭州:浙江大学,1997.
[6] 黄国治,傅丰礼.中小旋转电机设计手册[M].北京:中国电力出版社,2007.
[7] 刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
新传奇(2022年6期)2022-02-22
小学科学(学生版)(2021年4期)2021-07-23
上海大中型电机(2021年2期)2021-07-21
自我保健(2019年11期)2020-01-09
上海建材(2019年3期)2019-09-18
科学导报(2018年17期)2018-05-14
军事文摘(2017年16期)2018-01-19
中国新闻周刊(2017年28期)2017-08-12
中国科技教育(2016年12期)2017-08-11