
在虚拟环境下分析车群行为安全的方法
2010-06-02 08:01纪廷婷陈少军陈雨人
重庆交通大学学报(自然科学版) 2010年1期
纪廷婷,陈少军,陈雨人
(1.同济大学交通运输工程学院,上海 201804;2.同济大学建筑设计研究院(集团)有限公司,上海 200092)
在虚拟环境下分析车群行为安全的方法
纪廷婷1,陈少军2,陈雨人1
(1.同济大学交通运输工程学院,上海 201804;2.同济大学建筑设计研究院(集团)有限公司,上海 200092)
利用虚拟化平台研究车群的运动特征规律。内容包括软硬件平台结构,试验过程,数据采集,分析计算和数据可靠性分析等几个部分。试验中由15个驾驶员在同一场景中进行模拟驾驶,同时采集各自车辆的运动参数,包括车辆的行驶轨迹、各种速度加速度、刹车使用情况以及方向盘使用情况等。运用模糊神经网络及风险概率矩阵分析上述数据,计算出车群发生风险的情况概率,提出了一种研究车群行为安全的方法。
虚拟驾驶;车群风险;模糊神经网络;风险概率矩阵
车辆是人、车、路系统中很重要的一部分,车辆运动规律对交通事故的发生影响很大,目前对车辆运动规律的研究一直是热点,围绕车辆速度、汽车轨迹、车辆动力学仿真的各类研究层出不穷,如文献[1],总结了多个运行车速预测模型,并提出了自己的研究方法和模型;文献[2]讨论了汽车轨迹与行车安全的关系,而文献[3]的作者更是对车辆动力学,包括行驶轨迹、驾驶员视觉特征等多方面对车辆运动规律进行了研究,但是这些研究基本上都是考虑单车运动规律的,事实上随着车辆数目增加,由于车辆间存在相互影响,交通事故发生的规律和特征大不一样了,因此车辆相互之间的运动特征对于保障交通安全,减少交通事故都有重要意义。
运动特征的研究除依赖必要的推导计算以外,还需要大量的数据支持。目前对于汽车行驶状态数据的采集方式主要有现场采集和计算机仿真两种。现场试验采集得到的数据准确、真实,具有很高的实用性,但是这种方法成本高、代价大,在某些小数据量的试验中使用较为普遍,而对于大量数据的采集或者某些危险情况下的数据采集是不适用的。因此大多数学者的目光都投向了模拟仿真。
国外的研究人员较早的开始了模拟系统的研究,20世纪80年代,随着大型模拟器的建成,就有学者对虚拟驾驶模拟器在科研中的适用性进行了探讨[4]。国内虽起步较晚,但仍有很多学者积极讨论建立仿真系统的方法,并建立了可供使用的模拟系统[5-6]。
近年,虚拟技术已较为成熟,研究多集中在了模拟器的使用上,对驾驶员的各种驾驶行为进行了模拟以及研究。如文献[7],运用模拟平台讨论了疲劳驾驶与方向盘使用情况间的关系;还有文献通过试验研究了使用模拟器和在真实情况下驾驶速度的差异[8]在此基础上,展开了进一步的研究工作。如前文提到的文献[2],在仿真平台上通过研究驾驶轨迹偏离道路中心线的距离,提出了一种评价道路安全的方法。但目前的研究针对车群的较少,大多数都是针对单车展开研究;早期有一些针对车群运动特征的研究,但是由于技术手段有限,与实际情况还是有一些差异[9];而部分涉及到多车辆系统的,也都是虚拟一辆车模拟驾驶,其他车辆使用的是模型车,并不能表达真实的驾驶情况,如文献[10],并不涉及到较为真实的车群的运动特征。文献[11]是建立了一个能够提供多车群同时进行模拟驾驶的虚拟平台,并且在这个基础上建立了一些车群行为的基本模型。笔者是在此基础上同样的试验平台上,尝试对车群的运动特征进行进一步的研究,提出更加具体的试验方法及数据分析方法。
本文中,车群的定义是指以某一个单车为中心,周围一定范围内对其具有一定影响的所有车辆。单车的行驶特征常常用速度、加速度、制动距离、方向盘转角、航向角等参数来描述[12],从目前的研究来看,车群范围的指标定义主要集中在速度、加速度、车距和可能碰撞时间方面。其中后两个参数是区别于单车行驶特征的重要指标,而第4个因素将被作为车群范围确定的一个主要指标。
1 试验平台及试验方法
1.1 平台简介
试验所采用的硬件设施包括15台带操作系统的计算机及一台服务器,每台计算机配备专用方向盘及刹车等装置。计算机之间有局域网互相连接。
所选用的软件系统是法国达索公司旗下的Virtools软件。它能够对3D模型、2D图形以及音效等文件进行整合,轻松建立模型。Virtools Sever能够为使用者提供方便的联网功能。使用户仅通过简单易用的互动行为模组就实现网络连接。
根据试验要求,在此平台上构造了4个主要模块:道路模块、交通环境模块、驾驶员汽车模块以及车群行为模块。其中道路模块是系统的运行基础;交通环境模块包括道路设施的管理和可变的环境因素;驾驶员汽车模块是驾驶员与道路以及其他运输工具信息交流的主体;车群行为模块是用来研究车群之间行为、运动特征及判别车辆是否安全的重要模块,是整个系统的核心,也是本研究重点关注的部分。
1.2 试验方法
试验选取了一段立交模型作为研究对象,根据相关研究[13],将试验路面的摩擦系数设定为0.9。并且,考虑有关研究得到的关于车辆比例与通行能力的结论[14],本组试验中的车群均由小车构成。参与试验的15名驾驶人员均具有中等驾驶水平,天气条件为良好,道路设施齐全,路面平整。
事先并不告知驾驶人员试验的目的,有一定时间让被测人员熟悉操作系统,在对模拟驾驶器操作较为熟练的情况下,展开试验。在虚拟驾驶过程中,驾驶人员需控制车辆的行驶速度及方向,要严格遵守交通法规。此外,对于驾驶员操纵车辆时的换道、超车等行为并无控制,驾驶员完全凭个人需求与经验进行驾驶。
此外,还可以改变试验中的某些条件,针对一些特定的影响因素进行试验,例如,可根据驾驶员对驾驶的熟练程度,将其分为初等驾驶技术者、中等驾驶技术者以及熟练驾驶技术者。在保持其他方面试验条件不变的情况下,将设定不同的驾驶人员所占比例,根据所占比例进行模拟驾驶,记录相关数据,考察人这一因素对车群运动特征的影响。也可分别模拟小型车、中型车、大型车、重型车不同的物理属性设定。变化每种车在车群中所占比例,进行试验,考察车辆变化对车群运动特征的影响。还可进行路(环境)对照组试验,改变道路条件或是自然环境。选择不同线形组合、不同道路设施,或者不同天气状况作为模型,考察各种环境因素对车群运动特征的影响。
2 数据采集
2.1 数据采集方法
使用Virtools的速度采集行为模块和物理属性采集行为模块可以直接在试验中得到所需数据,所得数据将与车辆ID关联,直接存放在数据库表中。
2.2 所得数据情况
获得数据的情况如表1。

表1 数据类型Tab.1 Data format
表中直接采集到的数据在试验中能立刻获得,而间接采集到的数据则需要依靠直接采集到的数据进行一定的计算才能得到,这些数据都将为进一步的分析研究提供支持。计算间接数据的具体情况如下:
1)车辆间距计算。虚拟试验中得到的大地坐标,可带入以下公式,以求得连续数据采集时刻中出现的任意两辆车之间的距离:

式中:d为数据采集时刻两辆车坐标之间的距离;(xi,yi,zi)为第 i辆车坐标;(xj,yj,zj)为第 j辆车的坐标。
2)瞬时速度值计算。运动目标在相邻的数据采集时刻移动的距离可通过下面公式计算出来,数据采集间隔为已知,因此可以计算出车辆在这段时间之内的平均速度,由于时间间隔很小,可将该速度作为物体在数据采集时刻的瞬时速度。

式中:vt为采集时刻的运动目标的瞬时运动速度;(xt,yt,zi)为前一数据采集时间时运动目标的坐标;Δt为连续相邻的数据采集时间间隔。
3)加速度计算。计算出瞬时速度之后,可再进一步计算出加速度,公式如下:

式中:at为驾驶器加速度;vt,vt+1为驾驶器在连续数据采集时刻的瞬时速度;Δt为连续相邻的数据采集时间间隔。
2.3 可靠性分析
误差主要来自两个方面,一方面来自虚拟平台的系统误差,另一方面来自计算过程中的计算误差。系统误差主要是由于模拟过程中的差异造成的,这方面的问题可通过进一步细化模型来解决。另一方面,在用直接获得的数据进行推算的时候也存在一定误差。在计算瞬时速度的时候采用了短时间内的平均速度来作近似。尽管如此,考虑到1/60 s也是一个很小的值,计算结果在工程上可用,所以试验所得数据仍然具有很高的可靠度。
3 数据分析
3.1 基本理论
单车之间碰撞可用简单的计算模型计算,已知两车坐标,速度及前进方向的情况下,可以计算出潜在的交叉位置坐标,再根据交叉位置算出两车到达交叉位置的时间差,对比驾驶员正常的反应时间,便可得出潜在驾驶风险概率。在整个驾驶过程中,可以随时计算该概率。而由于车群风险受到单车影响很大,通过检测单车及车辆之间的相互影响,便可以得出车群风险情况。
3.2 数据分析方法
由于车辆的风险不能即刻用是非逻辑来进行区别,往往可以将风险级别分为好几种感受程度,所以本文采用模糊逻辑进行分析,在多个输入指标与不同风险级别之间建立模糊规则,以计算不同级别的风险概率。选取三角函数座位模糊逻辑隶属函数,在建立隶属函数时使用了神经网络,对已有的一些数据进行训练,以便能够计算出各种情况下的风险值。
3.2.1 模糊规则的建立
首先根据可能出现的情况将风险分为安全、低风险、中等风险和高风险4个级别,用于描述车辆的安全状况。采取的输入指标包括前车速度、后车速度、前车加速度、后车加速度以及两车间距。
在单输入单输出情况下,计算模糊子集隶属函数的过程如下:
论域 V-l(速度)={0,40,80,120}和 P(风险)={1,2,3,4},其中 V-l表示前车速度,km/h,1,2,3,4 分别代表了碰撞风险等级。假设在汽车高速行驶情况下模糊子集的隶属函数,μA(高速)=0/0+0.3/40+0.6/80+1/120,μB(高风险)=0/1+0.2/2+0.6/3+1/4;在此条件下,次高速度时(次高速)=0.1/0+0.5/40+1/80+0.7/120;可以推算出(次高风险)的隶属函数(次高风险)=0/1+0.2/2+0.6/3+0.6/4。
使用相同方法,引入多个论域,可推导出多输入单输出的隶属函数,建立完整的多个指标输入的模糊规则。举例说明如下:
If(V-f is Vf-4)and(V-l is Vl-3)and(A-f is not A-f-1)and(A-l is not A-l-1)and(D-v is D-V-1)then(PROBILITY is HIGH-RISK)
这个规则的解释是如果后车速度在120 km/h左右,前车速度在80 km/h左右,车辆的加速度在较小值附近(无紧急刹车现象发生数值在1 m/s2),车间距在最小值附近(30 m),那么这两辆车的碰撞风险处于峰值阶段,取值在(3-4)之间。
按照这一规则,可以推出在特定速度、加速度及距离的情况下的风险等级,但要进一步算出车辆风险在各级别的分布概率,还需要作进一步的分析。
3.2.2 推理数据
由于神经网络具有很强的学习能力,能通过学习规则解决非线性问题,所以将神经网络结合起来,通过使用前文得到的数据,可以自主生成隶属函数和规则,进一步对模糊规则和隶属函数进行修正。
用前文所得到的数据作为基础数据,加以训练,就可以运用采集到的数据得到最终的单车风险数据了。
3.2.3 车群风险分析
车群状态处在不断的变化之中,但整个变化过程具有一定的连续性,潜在的驾驶风险必定是个累积的过程。风险变化率表征了车辆风险变化的剧烈程度,变化达到峰值,则表明风险情况发生了急剧突变,可能超出驾驶员应对能力,此时,车群可能爆发,变化率矩阵格式如下:
3.3 算例
以3辆车的小车群为例,结合试验采集到的数据,对车群安全性进行了分析,过程如下:原始数据情况如表2。

表2 原始数据Tab.2 Initial data
经计算成为可供使用的数据如表3。

表3 处理后的数据Tab.3 Treated data

表4 风险数据Tab.4 Risk data
其中的数值表示任意两辆车之间处于每个风险级别之间的概率。
通过一段时间的数据累积可得出车辆的高风险概率随时间的变化曲线图如图1、图2。
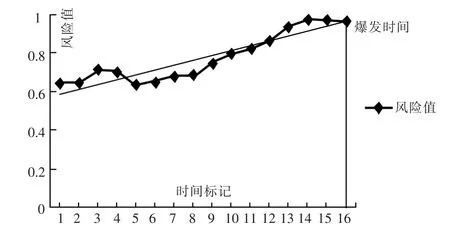
图1 客观风险变化Fig.1 Objective risk change

图2 驾驶员的感官风险变化Fig.2 Sensory risk change of drivers
用贝叶斯矩阵变化率法,建立分析矩阵,可计算出各时刻的变化率矩阵如下:

3.4 小结
由图1、图2可以看出,单车的风险是一个逐渐累积变大的过程,在此过程中,由于驾驶员的感官风险增加,可能会采取措施,导致客观风险降低,但是若驾驶员感觉不到风险存在,客观风险就会持续累积,导致风险爆发。
而由矩阵(2)~(4)可以看出,车群风险的爆发点是车群中风险变化率最大的那辆车,如矩阵(3)中的2-2,然后,此风险将传递给车辆3,如矩阵(4),导致整个车群安全性降低。
4 结论
目前,道路安全问题已经引起了很多人的关注和思考。研究车群的行为能够很好的帮助人们更加综合的认识和判断交通事故。本文所述的试验平台能够让15名驾驶员同时独立的操纵自己的车辆,同时采集多种数据,这是本文最大的创新点。在采集得到数据的基础上,还进行了相应的数据分析,提出了一种研究车群风险的计算方法。
在今后的进一步研究工作中还将继续对驾驶平台的进行细化,让驾驶人员有更加真实的驾驶感受。包括对车辆性能的更真实的再现、道路各种属性的模拟,以及交通环境、自然环境的进一步模拟再现。另外一方面,文中给出的分析方法只是简单的针对了最常见的一些数据,而如文中所述,在某些特殊的试验条件下,由于驾驶员、环境、车辆的不同所带来的影响,还可以做更深入地研究。总之,在这样一个平台建立的前提下,很多从前限于条件而未能解决的问题有了解决的可能性,这样的研究尝试是非常有益处的。
[1] Gibreel G M,M.Easa S.State of the art of highway geometric design consistency[J].Journal of Transportation Engineering,1999,125(4):305-313.
[2] 丁立,张勇刚,李欣,等.基于虚拟驾驶轨迹的高速公路安全评价[J].公路,2007,52(10):157-161.
[3] 杨轸.行车动力学仿真模型研究[D].上海:同济大学,2004.
[4] Alm H.Driving Simutators as Research Tools-a Validation Study Based on the VTI Driving Simulator[M].Unpublished,1995.
[5] 汪璇,陈定方,蒋云.虚拟驾驶系统运行仿真及控制的设计与实现[J].湖北大学工业学报,2007,22(3):71-74.
[6] 陈涛,魏朗.人-车-路虚拟仿真中驾驶数据采集系统开发[J].计算机应用研究,2007,24(7):229-231.
[7] Mortazavi A.Effect of drowsiness on driving performance variables of commercial vehicle drivers[J].International Journal of Automotive Technology,2009,10(3):391-404.
[8] Francesco Bella.Driving simulator for speed research on two-lane rural roads [J].Accident Analysis and Prevention,2008,40(3):1078-1087.
[9] 黄小原,樊治平,张文江.高速公路车辆群模型与控制[J].东北工学院学报:自然科学版,1990,11(4):377-382.
[10]陈涛,魏朗.道路行车安全虚拟评价方法研究[J].安全与环境学报,2006,6(6):115-118.
[11]陈少军,陈雨人,顾丁奕.基于多人驾驶虚拟平台研究车群行为的基础模型设计[J].交通与计算机,2008,26(5):14-18.
[12]邵毅明,胡燕,徐进,等.道路事故多发路段动力学仿真识别系统[J].交通运输工程学报,2008,8(1):123-126.
[13]谢静芳,吕得宝,王宝书.高速公路路面摩擦气象指数预报方法[J].气象与环境学报,2006,22(6):18-21.
[14]李爱增,李文权.路段多车型混合车流通行能力[J].东南大学学报:自然科学版,2007,37(5):926-929.
Method to Analyze Behavior Safety of Vehicle Group in Virtual Condition
JI Ting-ting1,CHEN Shao-jun2,CHEN Yu-ren1
(1.School of Traffic & Transportation Engineering,Tongji University,Shanghai 201804,China;
2.Research Institute of Architectural Design(Group)Co.Ltd,Tongji University,Shanghai 200092,China)
The moving characteristics and rule of vehicle group are studied in the virtual condition,which includes the framework of the software and hardware,the experiment process,the data collection,analysis and calculation,as well as the data reliability analysis.In the experimentation,15 drivers simulate driving in one scene,meanwhile,the moving parameters of vehicles are collected respectively,including the running track,all kinds of velocity and acceleration,and the use of brake and steering wheel of the vehicles etc.Fuzzy neural network and risk probability matrix are used to analyze the data mentioned,and the risk probability of the vehicle group is calculated;furthermore,the method to study behavior safety of vehicle group is proposed.
virtual driving;vehicle group risk;fuzzy neural network;risk probability matrix
U491.3
A
1674-0696(2010)01-0125-04
2009-09-17;
2009-10-17
纪廷婷(1984-),女,四川成都人,硕士研究生,主要从事道路安全方面的研究。E-mail:amulet1984@hotmail.com。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
汽车实用技术(2022年4期)2022-03-07
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
公民与法治(2016年4期)2016-05-17
汽车文摘(2015年11期)2015-12-02
汽车与新动力(2012年1期)2012-03-25
军事历史(1985年2期)1985-01-18
