基于灰度特性的海天背景小目标检测
2010-05-11 08:26董宇星刘伟宁
中国光学 2010年3期
董宇星,刘伟宁
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
基于灰度特性的海天背景小目标检测
董宇星1,2,刘伟宁1
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
针对复杂海天背景下的小目标检测存在海浪、云层干扰等问题,提出了先提取海天线,然后利用一维最大熵阈值分割法对出现在天空、海面或者海天线附近特定区域的目标进行检测的算法。该算法主要利用天空海面行灰度均值特性,结合梯度运算和形态学运算在海天线的潜在位置中检测边缘,进而用强鲁棒性的Hough变换直线检测法拟合海天线,实现对海天线的准确定位。实验处理分辨率为256 pixel×256 pixel的位图时,定位海天线需时4.1ms,检测到目标需时5.3ms,完全满足高帧频图像处理的实时性要求。实验结果表明,该算法能够快速、准确地检测出小目标,大大降低了虚警率。
小目标检测;海天线;灰度特性;背景分析;图像处理
1 引言
船载电视跟踪系统用于对海天背景下的小目标进行捕获和跟踪,主要是通过单帧图像处理捕获和跟踪结果,其难点在于消除海空背景所形成的强杂波,提高对单帧图像中小目标的检测能力。由于天空和海洋背景[1]的灰度、噪声特性差异较大,而且复杂的海天背景中,移动的海面和起伏的波浪反光会使图像的信噪比和对比度等信息都随着浪高、距离和太阳位置的不同而不断变化,背景变化复杂。如果对近海目标直接进行全局检测和处理,很可能会把海面附近的强噪声点作为目标,造成很高的虚警率。
单帧海空图像可划分为天空区域、海天线区域和海面区域。在海天线附近,云层干扰和海面杂波干扰组成的复杂海空背景使自动目标捕获、跟踪的困难较大。如果先检测出海天线区域,就可以在一定程度上降低后续小目标检测的难度。因此,本文提出首先确定海天线位置,然后针对目标出现的不同位置,在特定的区域中检测目标。传统的Canny[2]算子在对图像进行边缘检测时,需要对图像数据进行高斯平滑运算、梯度运算、非极值抑制及双门限检测运算,需要很大的存储空间和计算时间,很难做到高帧频图像处理的实时性。本文算法的实验结果表明,该方法简单、快捷,具有很强的鲁棒性,可满足高帧频图像处理的实时性。
2 海天背景特性分析
对于海天线附近的海空背景[3],由于云层和海浪在形成过程中受到物理规律的制约,它们在空间上往往呈大面积的连续分布状态,并且海洋背景和天空背景平均灰度分布一般都在不同的范围内,但在二者的交接处会有比较明显过渡带,即海天线的存在。总的来说,无论是从理论上还是通过对实际拍摄的图像的分析来看,海空图像[4]都具有以下的特性:
(1)天空、海面各自具有相对比较平缓的灰度变化。
(2)天空、海面平均灰度有一定的偏差。
(3)在垂直方向上存在比较明显的过渡带或者渐进的过渡带。
一般存在着两种情况:海面亮度较高,天空亮度较低;海面亮度较低,天空亮度较高,如图1所示。根据其灰度特性统计的行灰度均值曲线,如图2所示。在实际拍摄的海空背景图片中,可能会由于光照、天气等的影响,海天线呈现出一个渐进的过渡带,使行均值灰度曲线的峰值不明显,这时可以采用对行均值灰度曲线求梯度运算,使其具有更明显的峰点。如果能够准确检测出海天线的位置,就可以对小目标在单一背景下进行检测,这样可以明显提高准确度,而且可以减少检测区域的面积和计算时间,达到实时处理。
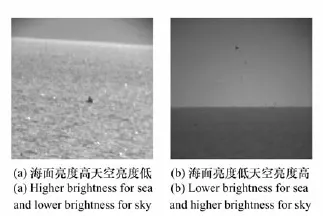
图1 原图Fig.1 Original images
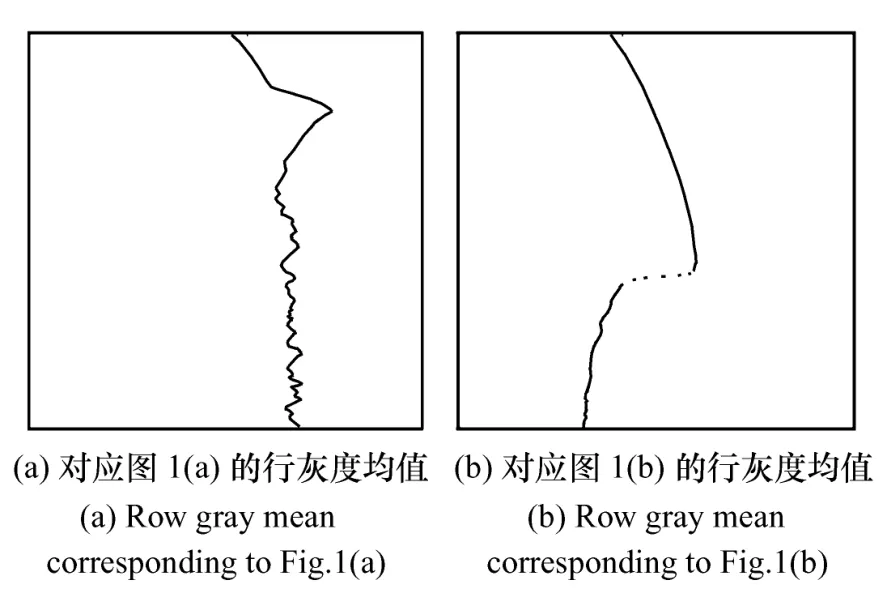
图2 行灰度均值曲线Fig.2 Lines of row gray mean
3 行映射法海天线粗定位
通过分析海天背景图像特性可知,海背景和天空背景在成像平面上的成像效果差别很大,即海背景部分和天空背景部分有各自的灰度聚集范围,两种背景之间有一条过渡带。如果fi,j代表点(i,j)处的像素灰度,而μi代表第i行像素灰度的平均值,计算公式如下:

以行数i作为横坐标,以行的灰度值(归一化)作为纵坐标,所画出的曲线就是行均值曲线。基于行映射曲线梯度算法的海天线提取算法,能够较好地定位海天线,计算量小、易于实时实现。但是这种算法仅能对行进行定位,对于倾斜的海天线,无法精确定位。
为了减少计算量和尽量减少海面、天空干扰信号的影响,这里仅对海天线潜在区域附近的子带图像进行二值化处理。首先通过以行均值曲线突变点或其梯度曲线[5]的最大值点所在的行n0作为分割点,分别计算以此区分的天空、海面灰度的平均值,如下式:
其中N为图像中的总行数,f(i)为第i行的灰度值,T即为所求得的分割阈值。
为了下一步利用直线拟合定位海天线,需要对二值化之后的子带图像通过Sobel算子检测边缘。由于海天线接近水平方向,这里仅利用3×3垂直Sobel算子检测水平边缘。
4 用快速Hough变换精确定位海天线
Hough变换[6]是对图像进行某种形式的坐标变换。它将原始图像中给定形状的曲线或直线变换成变换空间中的一个点,即原始图像中给定形状的曲线和直线上的所有点都集中到变换空间的某个点上形成峰点。这样,就把原始图像中给定形状曲线或直线的检测问题,变换成寻找变换空间中的峰点问题,即把检测整体特性(给定曲线的点集)变成检测局部特性的问题。
Hough变换检测直线的基本思想是点到线的对偶性。变换前在图像空间,变换后在参数空间,设在原始图像空间(x,y),直线方程为:

式中a为斜率,b为截距。对于这个直线上的任一点pi=(xi,yi)来说,它在由斜率和截距组成的变换空间(a,b)中应满足如下方程式:

从而可以看出,图像空间的一个点(xi,yi)对应于变换空间(a,b)中的一条直线;而变换空间中的一个点(a1,b1)对应于图像空间中的一条斜率为a1,截距为b1的直线y=(a1x+b1),变换关系如图3所示。
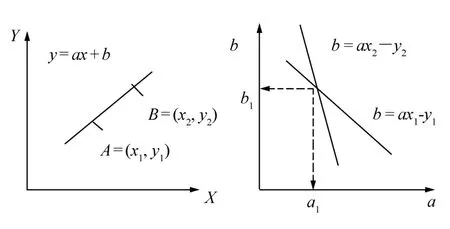
图3 Hough变换Fig.3 Hough transform
对于任意方向和任意位置直线的检测,为了避免垂直线的无限大斜率问题,往往采用极坐标(ρ,θ)作为变换空间,其极坐标方程可写成:

参量ρ和θ可以唯一地确定一条直线,ρ表示原点到直线的距离,θ是该直线的法线与x轴的夹角。对于(x,y)空间中的任一点(xi,yi)采用极坐标(ρ,θ)作为变换空间,其变换方程为ρ=xicosθ+yisinθ,这表明原图像空间中的一点(xi,yi)对应于(ρ,θ)空间中的一条正弦曲线,其初始角和幅值随xi和yi的值而变。若将(x,y)空间中在同一直线上的一个点序列变换到(ρ,θ)空间,则所有正弦曲线都经过一点(ρ0,θ0),ρ0为这条直线到原点的距离,θ0为法线与x轴的夹角。其中直线的倾斜角φ与θ之间的关系为:

从上述的步骤中不难发现,Hough变换的一个突出优点是抗干扰能力强。如果待检测线条上有小的扰动或断裂,甚至虚线,进行Hough变换后,在变换空间中仍能得到明显的峰值。
从上述原理可知:Hough变换可以将任意的直线通过变换映射到0~180°的θ变换空间中,原始Hough变换空间横坐标是180°范围的网格区域。实际中,由于船摇不会过大,海天线通常不会有过大的倾斜度,一般海天线会以水平面为基准上下摆动,因此,通过Hough变换原理检测海天线时,在变换域搜索极大值点时,只在θ的有限区域中寻找而不必浪费过多不必要的计算。根据式(7)直线的倾斜角φ与θ之间的关系:可知,如果设定海天线最大倾斜为φmax,即可以得到有效θ范围为:

假设海天线倾斜角φ为0~30°和150~180°,则有效变换域θ为90~120°和60~90°,即φmax=30°时,θ=[90°-φmax,90°+φmax]=[60°,120°]。
变换空间θ从0~180°变为60~120°,减少到原来的1/3。因此,根据海天线倾斜角的特点,采用式(8)开辟变换域空间,利用局部Hough变换拟合直线能够大大减少存储空间的开销和计算时间,更适合于实时处理。
5 实验结果及分析
采用本文的检测算法对实际拍摄的海空背景下的图片在VC++6.0环境中进行了仿真实验。图片分辨率为256 pixel×256 pixel。分别使用Canny算子处理及本文算法处理进行对比。图4中(a)、(e)是原始图像;(b)、(f)为对海天线区域进行二值化之后的结果;(c)、(g)为Hough变换法海天线检测结果;(d)、(h)为在单一背景下小目标检测结果。

图4 实验结果Fig.4 Results of the experiment
从以上实验结果可以看出:对于海浪干扰较小的图4(d),在二值化时,潜在区域中没有太多的干扰点存在,海天线提取效果最好;而对于图4(a),干扰较多,二值化可能会引入一些干扰点,利用形态学滤波可以去除大部分的干扰点。大量的图片实验表明,由于环境条件的变化,不同的图片干扰点的影响程度不同,有时可能无法全部去除,所以本文在直线拟合时采用Hough变换法而不是最小二乘拟合法,主要是为了尽量减少干扰点的影响,且Hough变换法具有更强的鲁棒性。最后利用一维最大熵阈值分割法[7]分别对海面和天空背景下的小目标进行检测,检测结果如图4(d)和图4(h)所示。从图中可以看到,利用简单的阈值分割法即可检测出小目标。与Canny算子处理时间比较,本文算法检测到海天线所用时间是Canny算子所用时间的1/4,表1是对图4(a)处理的时间,表2是对图4(e)处理的时间,结合检测目标所用的时间,可以满足实时高帧频图像处理要求。
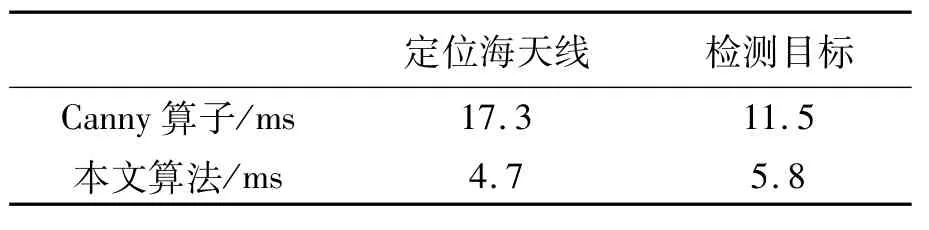
表1 图4(a)处理时间比较Tab.1 Comparison of processing time for Fig.4(a)
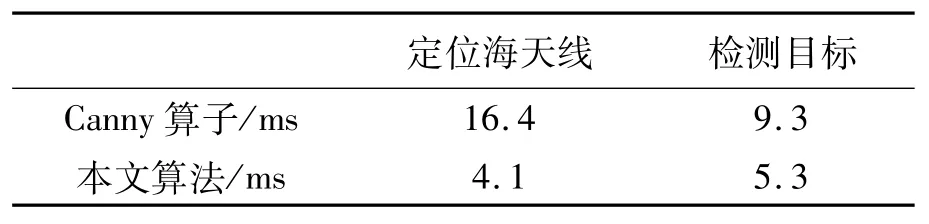
表2 图4(e)处理时间比较Tab.2 Com parison of processing time for Fig.4(e)
6 结束语
针对复杂的海天背景小目标检测,提出了先提取海天线,然后对出现在天空、海面或者海天线附近特定区域的目标进行检测的算法。该算法主要利用天空海面行灰度均值的特性,结合梯度运算和形态学运算在海天线的潜在位置中检测边缘,进而用强鲁棒性的Hough变换直线检测法拟合海天线,实现对海天线的准确定位。实验结果表明:该算法能够快速、准确地检测出小目标,大大降低了虚警率。
[1]刘松涛,沈同圣,韩艳丽,等.舰船目标海天线提取方法研究[J].激光与红外,2003,33(1):51-53.
LIU ST,SHEN T SH,HAN Y L,et al..Research on locating the horizontal region of ship target[J].Laser&Infrared,2003,33(1):51-53.(in Chinese)
[2]何新英,王家忠,孙晨霞,等.基于数学形态学和Canny算子边缘提取方法[J].计算机应用,2008,28(2):478-480.
HE X Y,WANG JZH,SUN CH X,et al..Edge detectionmethod based onmathematicalmorphology and Canny algorithm[J].J.Computer Appl.,2008,28(2):478-480.(in Chinese)
[3]WEIY,SHIZ L,YU H B.An automatic target detection algorithm based on waveletanalysis for infrared image small target in background of sea and sky[J].SPIE,2003,5082:123-131.
[4]DAVIESY D,PALMERY P,MIRMEHDIM.Detection and tracking of very small low contrast objects[J].Proc of the British Machine Vision Conference′98,1998:599-608.
[5]易大义,沈云宝,李有法.计算方法[M].2版.杭州:浙江大学出版社,2003.
YID Y,SHEN Y B,LI Y F.Computational Methods[M].2nd ed.Hangzhou:Zhejiang University Press,2003.(in Chinese)
[6]夏良正.数字图像处理[M].南京:东南大学出版社,1999.
XIA L ZH.Digital Image Processing[M].Nanjing:Southeast University Press,1999.(in Chinese)
[7]范宏深,倪国强,冯煜芳.复杂背景可见光图像中小目标探测的新算法[J].光电工程,2004,31(6):48-51.
FAN H SH,NIG Q,FENG Y F.A new algorithm for small and dim target detection of visible image under heavy clutters[J].Opto-electronic Eng.,2004,31(6):48-51.(in Chinese)
Detection of sea-sky line in comp licated background based on grey characteristics
DONG Yu-xing1,2,LIUWei-ning1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China 2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
To detect precisely small and dim targets in a complicated background with ocean waves and cloud clutters,a new algorithm is presented which picks up the sea-sky line at first,then efficiently detects the targets on the special region under sky,ocean,and nearby the sea-sky line.On the basis of the line gray characteristics of sea and sky,this algorithm combines the gradientmethod and morphologic operation to segment the sub-band image in a potential area of sea-sky line,further to fit the sea-sky line by Hough transform to implement the precise location of the sea-sky line.The experiment result shows that thismethod can extract the seasky line from the complicated sea-sky background and can detect the small targets fast and efficiently.For a 256 pixel×256 pixel file,the sea-sky line can be located in 4.1 ms and a small target can be detected in 5.3 ms,which demonstrates that the algorithm can meet the requirements of high frame image processing in real time.
sea-sky line;grey characteristic;morphologic operation;Hough translation;line fitting
国家863高技术研究发展计划资助项目(No.2006aa701410)
1674-2915(2010)03-0252-05
TP391.4
A
2010-04-16;
2010-05-07
董宇星(1979—),男,吉林大安人,助理研究员,主要从事弱目标捕获、跟踪等方面的研究。E-mail:dongyuxing@126.com
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
成都信息工程大学学报(2022年2期)2022-06-14
红蜻蜓·低年级(2021年2期)2021-07-20
天津医科大学学报(2021年1期)2021-01-26
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
中国交通信息化(2017年10期)2017-06-06
自动化学报(2017年5期)2017-05-14
电子制作(2016年1期)2016-11-07
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01