
火工品运料小车的自动控制系统
2010-05-11 03:48:34赵瑞玲陈朝春
自动化与信息工程 2010年3期
赵瑞玲 陈朝春
1 引言
民爆器材行业被称为“能源工业的能源,基础工业的基础”,因此民爆器材行业在国民经济发展中具有重要作用。而在生产过程中,我国大多数民爆器材生产厂家的生产原料和成品仍采用人工运输方式,工作人员劳动强度大,生产效率低,安全性差。为了提高生产效率,保证工作人员安全,实现危险工序无人操作,采用自动运料小车来运输生产原料和成品。
2 系统结构与工作原理
2.1 系统结构
自动运料小车由防爆车体、载货箱、光电开关、接近开关、警示灯、控制器、蓄电池等构成,该控制系统的采样周期是4.5ms,能够满足小车整体实时性的要求,其侧面框图结构如图1所示。
图1 运料小车侧面框图结构
运料小车采用四轮驱动方式,结构为两个直流电机驱动转向机构,如图2所示。运行过程中,四个驱动电机总是处于工作状态,便于小车负重运行,提高了工作效率。两个转向机构采用斜齿轮相啮合连杆传动,该机构能够改变力的传动方向,实现两两驱动轮同时同方向的转向,控制结构简单。而且直流电机具有优良的速度控制性能,实现了高速运行的平稳性、稳定性和沿曲线移动的灵活性。

图2 运料小车结构图
2.2 小车工作过程
运料小车能够沿着导引线自主前行,它是通过车头与车尾底部横向排列的4个光电开关检测导引线,再发送信号到控制器。控制器对检测信号进行处理,并控制直流电机校正偏移量,从而实现巡导引线行走。
巡导引线时如图3所示[1],黑色小圆圈表示光电开关,共有4个,车体前后各两个,椭圆表示接近开关,共有两个,车体前后各1个,当光电开关在导引线上时是低电平,给出0信号,不在导引线上时是高电平,给出1信号。
图3 小车巡导引线示意图
当运料小车自主向右(X1方向)前行时,接近开关S2作为小车停止控制信号,光电开关G3和G4起到巡导引线的作用,当小车处于 C状态时信号为(1,0),表示小车向左偏了,转向电机就向顺时针方向转动,至光电开关G3状态为0时止;B状态时信号为(0,1),表示小车向右偏了,转向电机就向逆时针方向转动,至G4光电开关状态为0时为止;A状态时信号为(0,0),表示小车在正确位置上,转向电机不工作,小车保持直行。如此实时纠偏,保证小车始终沿正确轨道前进。
同样,运料小车自主向左(X0方向)前行时,接近开关 S1作为小车停止控制信号,光电开关 G1和G2起到巡导引线的作用。
3 系统电路的设计
光电开关配以外围电路可以实现识别导引线的功能,光电传感器与控制器的连接框图如图4所示[1]。光电传感器将导引线存在的信号和电位器的信号,经比较器后输出电平信号给控制器,但这种电路稳定性差,识别精度不高。

图4 光电开关与控制器的连接框图
其电路图如图5所示[2]。当检测到导引线,比较器的输出LM324是低电平,其他输出是高电平,通过高低电平电压不同输出,把该信息交给控制器判断处理,指挥下一步的运行方向,从而达到巡导引线的功能。
图5 光电开关电路图
小车驱动电机的控制是通过控制器来实现的,而控制器输出的信号是一个低压信号,不能直接驱动电机的转动,因此需要运用共射极放大电路来驱动电机转动,其驱动电路图如图6所示。
图6 电机的驱动电路
4 软件设计
系统软件主要由传感器检测和电机控制处理程序,控制运料小车自主运行。程序在运行过程中,不断查询外部传感器信号,并对所采集的信号进行判断处理,其程序框图如图7 所示[3,4]。
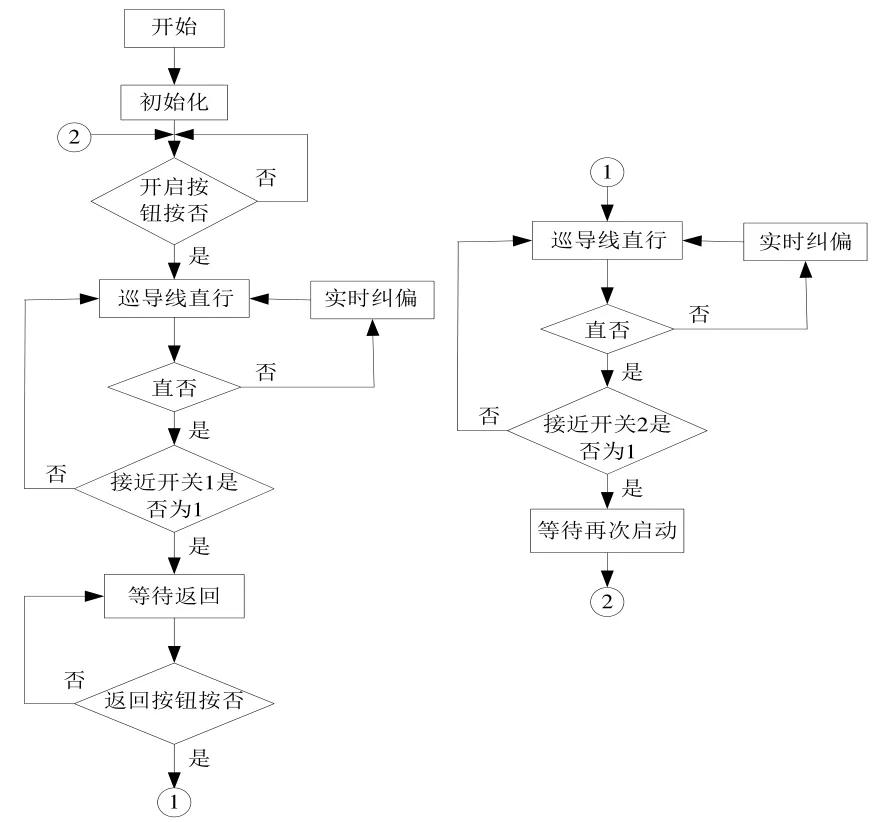
图7 程序框图
控制程序不断实时读取传感器的值,并进行判断,将相应的电机控制信号输出,最终控制电机驱动电路来驱动电机进行转动,该自动运料小车设计简单,易于实现。
5 总结
2010年3月,调试时采用光电判断器克服了外界光线干扰,而且选用锂电池作为电源克服了电源使用时间不长和寿命的问题,并将调试完的火工品运料小车进行试验运行,其具备自动巡线运行功能,但小车运行的可靠性与稳定性有待进一步提高。
[1] 卜弘毅,侯庭波,蒋鑫等.单片机实现自控机器人小车[J].电子世界.2003,1:44-46
[2] 朱俊.智能小车的自动化控制[J].常州信息职业技术学院学报.2006,5(4):16-18
[3] 肖立,佟仕忠,丁启敏等.基于 PIC单片机控制的智能巡线小车[J].中国仪器仪表,2005,3:95-96
[4] 狄敬国,程继兴,李秀美等.一种基于PLC的运料小车设计[J].农业装备技术.2006,32(3)
猜你喜欢
煤炭与化工(2022年3期)2022-04-08 05:53:10
商品与质量(2020年33期)2020-11-07 02:19:42
湖南工程学院学报(自然科学版)(2020年3期)2020-10-24 07:10:48
汽车维修技师(2019年7期)2020-01-16 04:33:04
山东工业技术(2019年4期)2019-10-14 22:29:56
现代商贸工业(2018年31期)2018-12-08 11:17:54
汽车维修技师(2018年11期)2018-05-11 02:38:32
科教导刊·电子版(2017年34期)2018-01-31 11:54:33
电子测试(2017年11期)2017-12-15 08:56:50
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
