
基于机器视觉的船舶升沉检测方法
2010-05-11 03:48:36邹木春曾应坚
自动化与信息工程 2010年3期
邹木春 曾应坚
1 引言
船舶的工作环境十分复杂,受风、浪、流、潮的影响,不可避免地产生显著的升沉摇摆运动,给船上作业、水下作业带来一定的影响,甚至会导致安全事故[1]。因此准确检测船舶的升沉位移量,为生产系统提供合适的补偿是非常必要的。
目前检测船舶的升沉位移量方法主要有姿态传感器法、零波面超声波检测法和传感器系统检测法等[2~4]。姿态传感器法是为测量船体或水中拖体的动态变化而设计的,仪器需固定安装在船体上,可以提供实时高动态精度的运动测量数据。但它价格比较昂贵,固定安装后需作比较复杂的调试后方能使用;零波面超声波检测法基于零波面理论,利用超声测距原理进行测量。其在环境复杂的情况下,噪声和误差都比较大,而且该办法需安装三个具有恒深度自动调节功能的超声发射器,实际操作困难;传感器系统检测法则需在补给船(岸基)与被补给船上分别安装各种传感器,然后利用电脑系统来分析处理数据,调试系统时需考虑各传感器的安装位置与性能,对于经常变换被补给船只时,安装调试工作量大、准确度不高。综合上述办法的利弊,结合民用起重作业的特点,本文提出一种基于机器视觉的船舶升沉检测方法。
2 船舶升沉检测系统架构
在波浪补偿系统中,需要检测的数据是补给船(或岸基)与被补给船的相对位置。对于起重作业来说,需要的仅是被补给船上货物着落点与补给船(或岸基)上起重机吊臂间的相对高度。检测系统架构如图1所示,主要包括两个摄像头、一台电脑(或DSP系统)、一个特征物体。系统双目摄像头固定安装在起重机吊臂上,安装时两摄像头光轴平面与水平面垂直。在被补给船上的货物着落点附近放置特征物体,利用双目立体视觉三维测量的办法即可检测出摄像头与特征物体之间的相对位置,从而得出相对高度。为了便于图像处理,系统采用的特征物体是一圆形色块。
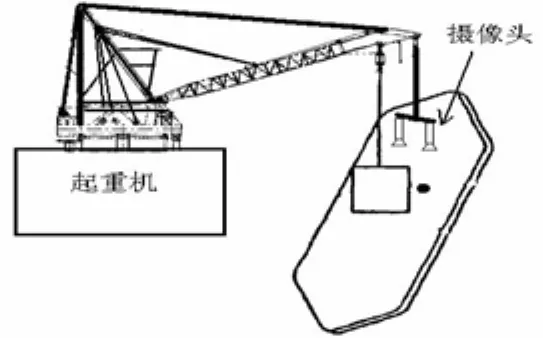
图1 系统架构图
3 基于机器视觉的船舶升沉检测方法
3.1 船舶升沉双目立体视觉三维测量机理
船舶升沉双目立体视觉三维测量原理如图2所示,设左摄像头O-xyz位于世界坐标系的原点且无旋转,图像坐标系为Ol-XlYl,,有效焦距为fl;右摄像头坐标为Or-xryrzr,图像坐标系为Or-XrYr,,有效焦距为fr。
对于船舶升沉过程同一特征点P,在左右两摄像机的图像坐标分别为Pl=(Xl,Yl)、Pr=(Xr,Yr)
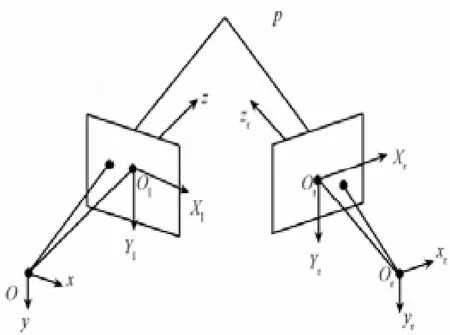
图2 双目立体视觉测量中空间点三维重建
则空间P点的三维坐标可以表示为
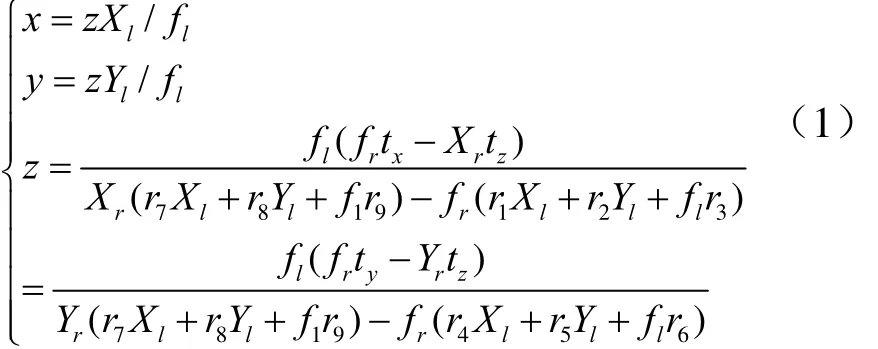
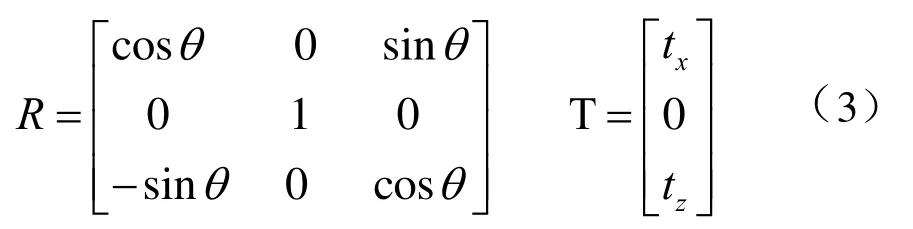
其中,O-xyz坐标系与Or-xryrzr坐标系之间的空间转换矩阵为Mlr,
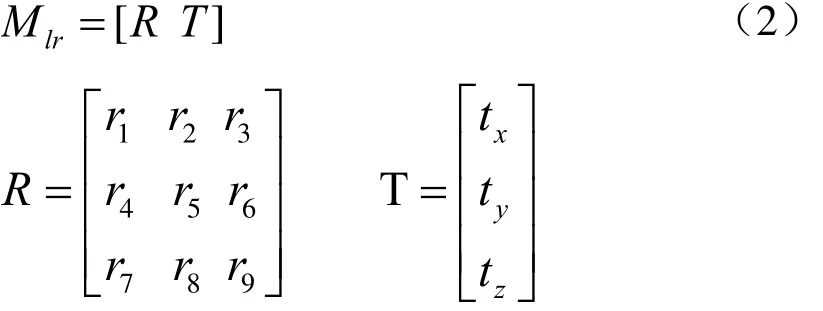
R,T分别为O-xyz坐标系与Or-xryrzr坐标系之间的旋转矩阵和原点的平移变换矢量。标定R、T参数,即可根据图像处理的输出结果求出 P的实际坐标位置[5]。本检测系统安装左右两摄像机时,因两摄像机光轴相交,且构成的平面与两摄像机图像平面垂直,Or-XrYr,系在与 O-xyz系重合的基础上绕 y轴旋转 θ角度并在xz平面上平移到(tx,tz),若旋转矩阵用欧拉角表示[6],则可得到如下R和T。
3.2 船舶升沉图像处理
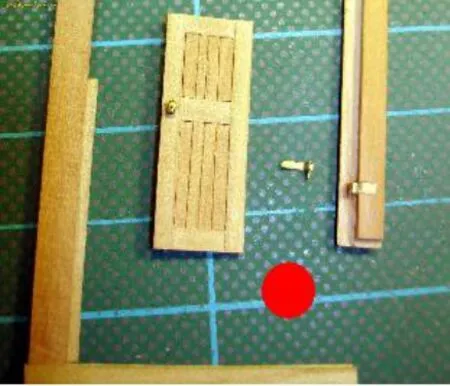
图3 获取的原图
在双目测距系统中,图像处理是关键,本系统中图像处理的办法如下:双目摄像头获取图像后(见图3),为使目标特征色块突出,先对图像进行针对特征颜色的色彩增强处理,尽量拉大图像色素值的差距。同时,为使后续图像处理节约时间和空间,把彩色图像转换为灰度图像,再二值化,效果如图4所示。接着对图像进行中值滤波,去掉离散的孤点,修补目标内部的一些空白点[7],效果如图5所示。最后在MATLAB中利用区域描绘子区域的质心求法[8],即函数 regionprops(L,’Centroid’),L 为图像矩阵,Centroid是各色块质心的 X、Y坐标向量,由此求得各区域质心坐标。根据特征色块面积最大特点,可得到目标特征色块点在左右两个平面图像中的坐标Pl=(Xl,Yl)、Pr=(Xr,Yr)。将 Xl、Yl、Xr、Yr代入经过标定后的双目测距公式(2),便可得到目标点在空间的坐标(X,Y,Z),从而得到直接反映了补给船(或岸基)与被补给船的相对垂直距离Z,即船舶的升沉量。系统数据处理流程图如图6所示。
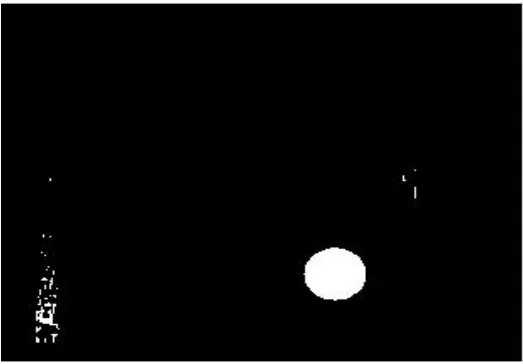
图4 色彩增强与二值化结果
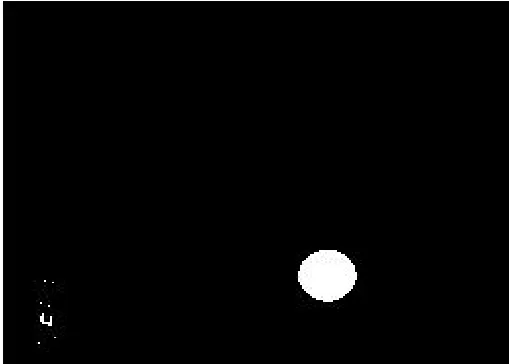
图5 去孤立点滤波结果
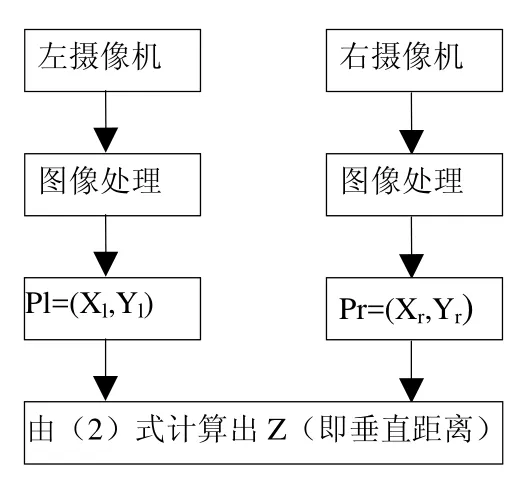
图6 系统数据处理流程图
4 应用试验
依据上述方法,先对本文所用的系统进行标定。试验时,将特征色块放在实验船舶中不同方位(即空间坐标X、Y)、不同距离(即空间坐标Z),获取特征点在左右摄像机摄取的图像坐标Pl(Xl,Yl)、Pr(Xr,Yr)后,利用MATLAB进行处理,即可计算出特征点到摄像头的垂直距离Z,如下表1所示。
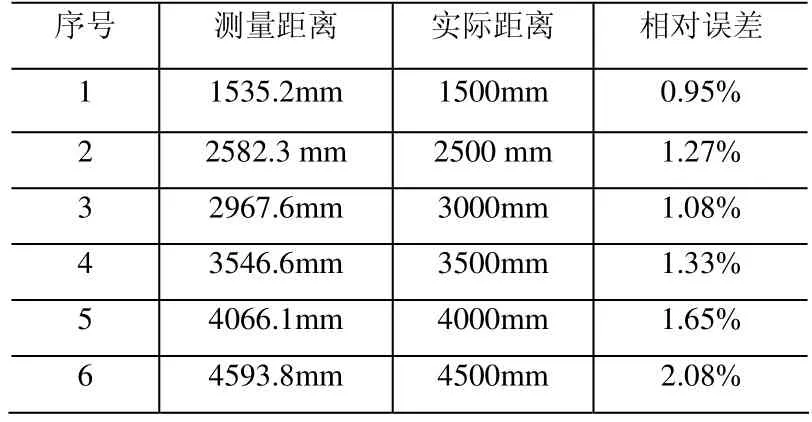
表1 双目测距试验数据
应用表明,该系统可以得到比较满意的效果。
5 结束语
由2个摄像机和计算机组成的机器视觉测量传感器是一种非接触式、测量快速的传感器,在一定的范围内具有较高的测量精度。这种基于机器视觉的船舶升沉检测方法安装调试简单、价格便宜,在民用起重作业的波浪补偿系统中,它既可以代替更优于其他测量办法,为波浪补偿系统提供船舶升沉量的数据,满足安全作业的要求。
[1] Wang Fan,Jin Hongzhang.Design a mini-type marine attitude measurement system for self-propelled model trials[J].Measurement: Journal of the International Measurement Confederation,2009,42(6): 954-962
[2] 郭发滨,张卫红.姿态传感器在水深测量中的应用[J].海洋测绘,2004,24(4):56-58
[3] 罗忠辉,吴百海,龙建军等.一种新型深海采矿船升沉信号采集系统设计[J].仪表技术与传感器,2003,(9): 20-22
[4] 徐小军,何平,陈循,等.基于DSP的主动式波浪补偿起重机控制系统设计[J].国防科技大学学报,2008,30(1):110-114
[5] 张广军.视觉测量[M].北京:科学出版社,2008:135-136
[6] 张瑞森,刘冀伟.基于双目机器人的实时测距与追踪系统[J].电子器件,2007,30(5):1619-1620
[7] 张铮,黄艳平,薛桂香.数字图像处理与机器视觉[M]. 北京:人民邮电出版社,2010-04:156-158
[8] 张铮,黄艳平,薛桂香.数字图像处理与机器视觉[M].北京:人民邮电出版社,2010-04:381-382
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
电子制作(2019年20期)2019-12-04 03:51:38
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
中国船检(2017年3期)2017-05-18 11:33:09
现代计算机(2016年11期)2016-02-28 18:35:20
汽车维修与保养(2015年8期)2015-04-17 03:32:59
机械与电子(2014年2期)2014-02-28 02:07:46
