双基站GPS差分在试验场中的应用
2010-04-26 06:38:02杨靖宝
全球定位系统 2010年6期
杨靖宝
(91404部队92分队,河北 秦皇岛)
0 引 言
近年来,随着高精度电子武器的飞跃发展,对试验场位置测量设备的精度要求越来越高。以往试验场均采用单基准站差分GPS作为真值测量设备,测量电子武器定位精度为分米级,测量范围为几十公里;现代高精度电子武器定位精度已经达到分米级,真值测量设备要求精度应达到厘米级,测量范围为近百公里,才能满足试验场测量需求。单基站差分GPS测量已经不能满足试验场高精度测量要求,必须采用多基站GPS差分技术应用于试验场,特别是双基站GPS差分技术在试验场中的应用更符合实际的试验场。
1 单基站及多基站定位原理
1.1 单基准站GPS差分基本原理[1-2]
在靶场测量中GPS单站差分定位技术得到广泛的应用。差分定位是根据GPS的相对定位概念,将一台接收机安置于己知点,即称基准站,另一台或几台接收机放置在用户移动站,如目标船、飞机等,同时采集几颗卫星的信号,基准站可以实时或事后将其载波观测值和测站坐标信息传送给用户移动站。利用相对定位原理,将这些观测值进行差分,削弱和消除轨道误差、钟差、大气误差等的影响,使移动站定位精度大大提高。与其它差分不同的是,基准台传送的数据是伪距和相位的原始观测值,用户移动接收机利用相对测量方法对基线求解、解算载波相位差分改正值,然后解算出待测点的坐标。
单站差分定位的精度在良好条件下,即星数至少为5颗,PDOP值小,无多路径效应,甚至用户接收机处于静态或准动态等条件下可以达到或接近厘米级。在实际情况中不可能有那么好的条件,何况海面是一个强反射面,多路径效应十分明显,因此影响单站差分在水上定位准确度和可靠性的因素很多。尽管单站差分定位技术是目前最为广泛使用的测量技术之一,但它的应用受到一些误差源影响的限制,这些误差源从性质上一般可分为系统误差和偶然误差两类。系统误差包括:卫星星历误差、卫星钟误差、大气延时误差(包括电离层延时和对流层延时)以及天线相位中心变化等。偶然误差主要包括信号的多路径效应。但是这种方法的应用受到大气层影响的限制,往往使原始数据出现系统误差,定位成果的可靠性随距离增大而下降。近年来GPS差分技术有了新的进展,这就是建立在单基准站差分GPS上的一种新技术,即多基准站GPS网络差分技术。
1.2 多基准站(虚拟基准站法)[3-4]
虚拟基准站是多基准站中一种较好的方法。针对上述的单站差分定位测量中的误差与可靠性的问题,在单站差分GPS的基础上研究、开发而建立起来的一种新技术。目前应用于多基站数据处理方法有:虚拟基准站法(Virtual Reference Station-VRS)、偏导数法、线性内插法和条件平差法,其中虚拟基准站(VRS)技术是最有前途的方法。到目前为止,在欧洲瑞士与丹麦之间的海上工程中已使用了虚拟基准站(Virtual Reference Station)技术,在日本也开始开发VRS GPS技术。我国深圳市连续运行GPS系统就采用了VRS技术。
1.2.1 多基准站系统工作原理
在试验航区域内,均匀布设两个以上连续运行的GPS基准站,构成一个基准站网,借鉴广域差分GPS和具有多个基准站的局域差分GPS中的基本原理和方法,经过有效的组合,移动站将其概略坐标播发给控制中心;然后,控制中心搜集周围基准站的数据进行网平差,算出移动站的虚拟观测值;又将这些观测值播发给移动站,从而,实时算出移动站精密坐标。这就是多基准站系统工作原理。信息实时传递方式称为网络RTK,事后时间对其比对差分称为事后多基站差分。
基准站上应配置双频全波长GPS接收机,该接收机能同时提供精确的双频伪距观测值。基准站按规定的采样率进行连续观测,并通过事后或实时数据链将观测资料传送给移动站进行数据处理,其通信方式可采用数字数据网DON或其他方式。流动站可以根据自身的概略位置及收到的各基准站原始信息重新计算所有GPS观测数据,并内插到与流动站相匹配的位置。根据流动站的近似坐标来判断该站位于哪两(三)个基准站所组成的区域内,然后,根据这两(三)个基准站的观测资料求出该流动站处所受到的系统误差,流动站结合自身GPS观测值,组成双差相位观测值,快速确定整周模糊度参数和位置信息,完成实时定位。流动站可以位于多基准站网络中任何一点,这样流动站接收机的定位系统误差就能减少或削弱,提高了定位的准确度、可靠度。这是一种为一个虚拟的、没有实际架设基准站建立原始基准数据的技术,故称之“虚拟基准站”(VRS)。
由此可知,虚拟基准站法是设法在移动站相距数米或数十米处建立虚拟的“基准站”。并根据周围各基准站上的实际观测值算出该虚拟“基准站”上的虚拟观测值,由于虚拟站离移动站相当近,故流动站只需采用常规RTK技术就能利用虚拟基准站进行实时相对定位,获得较准确的定位结果。据国外资料报道,当站间距离为70 km时,用VRS法进行实时动态定位,可以使移动站接收机的准确度(Accuracy of a meauring RTK Receiver)达2~3 cm量级。
1.2.2 多基准站差分的技术优势
与单站差分相比,多基准站的优势有以下几点:
1)扩大了移动站与基准站的作业距离(可达到70 km),且完全保证定位精度;
2)常规RTK的测量准确度1 cm+l ppm◦D中的l ppm◦D的概念取消了,在控制的测区范围内始终可以达到1~2 cm左右。
3)对于长基线GPS网络,用户无需架设自己的基准站,费用大幅度降低;
4)改进了OTF初始化时间,提高了作业效率;
5)提高了定位的可靠性,确保了定位质量;
6)可以进行实时定位,又可以进行事后差分处理;
7)应用范围更广泛,可以满足各种控制测量、水运工程测量、疏浚定位、施工放样定位、变形观测、工程监控、船舶导航、生态环保以及城市测量与城市规划等。
2 双基站差分在试验场的应用
在试验场,新型电子武器装备对海上及空中的航路范围要求由原来的几十公里增加到近百公里,定位精度要求厘米级。单站载波相位差分保精度测量范围为20 km,必须采用多站差分技术应用于试验场。
由于海上环境试验为新型电子武器重点考核项目之一,所以多数试验场位于海边或湖边。考虑到试验航路(不同试验项目)范围的不确定性,要求基准站的布设可根据实际情况变化位置,所以基准站布设不易过多。为了节省人力、物力、财力,试验场采用双基准站GPS差分技术完全能够满足位置精度测量要求。
利用双基站GPS差分处理软件进行试验场动态跑车测量数据如下:
将两套同型号的GPS基准站分别沿试验航路布设在适当位置(已知点),两套活动站GPS安装于双排座汽车上,用测量尺测定双排座汽车上两活动站GPS天线之间的几何距离。四套GPS设备同时开机,工作稳定后,记录数据。双排座汽车以80~100 km/h的速度沿预定航路往返航行两个航次。将数据下载处理,比对单站差分与双站差分数据的稳定性。利用网络平差算法,两活动站之间的距离测量值与测好的活动站之间几何距离比较,得出精度误差,验证双站差分的结果是否达到指标要求。测试结果如下:
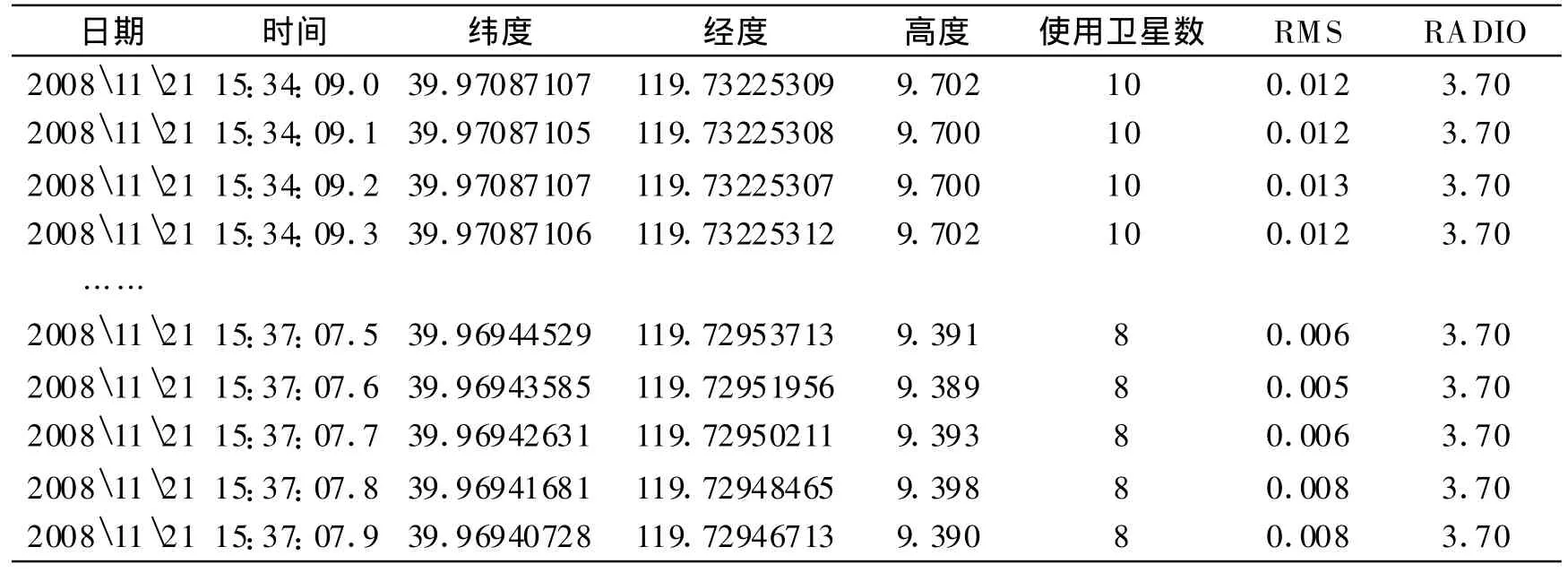
表1 活动目标1经双站差分后部分数据:(15:34-15:37)
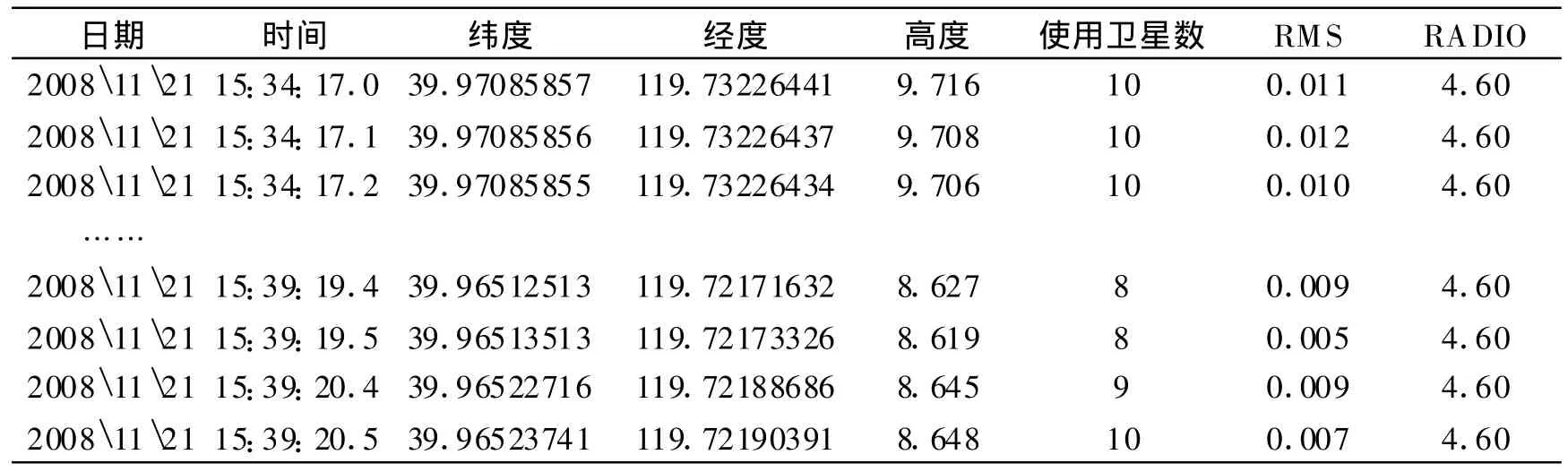
表2 活动目标2经双站差分后部分数据:(15:34-15:39)
两活动目标间距离为固定值:1.695 m。两活动目标利用双基站差分软件经过事后差分后的数据进行距离计算,结果与固定距离的一次差曲线如下:
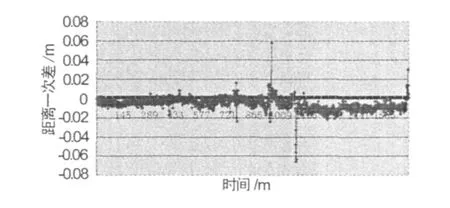
图1 距离一次差曲线
图1中,大于0.02 m的六个点为卫星受到环境遮挡时的定位数据误差,可以不予考虑。动态定位精度平均值为0.00555 m,中误差为0.008367 m,符合试验场对高精度电子武器位置真值测量精度要求。
3 结 论
双基站GPS差分在试验场高精度位置测量的实际需要。多基准站差分技术的发展与应用代表了GPS测量未来发展的方向。由于VRS技术的先进性,它一经问世便受到世界各国广泛关注。德国等国家已建成或正在建设,我国也已开始着手VRS技术的应用。作为试验场工程科技人员和管理人员要充分认识到采用VRS技术的必要性和紧迫性。如果能将试验场陆、海域连在一起,建立起VRS,环试验场网络差分工程建设的成果将会对靶场真值测量工程产生极大的军事效益和经济效益。
[1] Parkinson B W,Spilker J J.GPS理论与应用[M].吴晓进,谢洪华,刘乾富,译,陕西:西安导航技术研究所,1996.
[2] 徐绍铨,张华海,杨志强,王泽民.GPS原理及应用[M].3版.湖北:武汉测绘科技大学出版社,1998.
[3] 言 中,丁子民.卫星无线电导航[M].北京:国防工业出版社,1989.
[4] 吴俐民,丁仁学,李凤霞.GPS参考站原理与管理[M].陕西:西安交通大学出版社,2008.
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
石油沥青(2022年3期)2022-08-26 09:13:12
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10 10:18:36
加油站服务指南(2021年7期)2021-10-14 07:28:18
雷达与对抗(2021年4期)2021-03-18 02:33:16
汽车纵横(2021年3期)2021-03-18 01:29:24
测控技术(2018年10期)2018-11-25 09:35:40
无人机(2018年12期)2018-09-10 07:22:44
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13