北斗/INS组合导航关键技术分析
2010-04-26 06:36:38蒋庆仙田育民
全球定位系统 2010年6期
蒋庆仙,田育民,孙 葵
(1.西安测绘研究所,陕西西安710054;2.61363部队,陕西 西安710054)
0 引 言
导航是导引航行的简称,基本作用是引导飞机、舰船、车辆和个人,准确地沿着所选定的路线安全地到达目的地[1]。提高精度和可靠性是导航系统要解决的基本问题。目前,尚没有一种导航方式能够同时满足精度与可靠性的要求。解决这一问题的最佳方案就是采用多传感器融合技术,将多类信息按照某种最优融合准则进行融合,研制各种实用的组合导航系统[2-4]。因而,多传感器组合导航(包括多星座卫星组合、卫星导航与惯性导航组合和卫星导航与天文导航组合等)成为导航系统的发展趋势。
组合导航系统是将航行体(飞机、舰船等)上的导航设备组合成一个统一的系统,利用两种或两种以上的设备提供多重信息,构成一个多功能、高精度的冗余系统。惯性导航系统(INS)不仅可以连续、实时地提供位置、速度和姿态等多种导航信息,而且具有快速、动态性能好、短期精度高等特性。在组合导航中,多以INS作为基准导航系统,且以GPS与INS组合的系统最为理想。使GPS与INS组合的最优方法是深组合方法,即采用一个滤波器来统一处理GPS测得的伪距与伪距率以及从INS组合来的误差状态信息,用GPS测量值校准惯性器件的漂移值,同时利用校正后的INS速度信息对接收机的载波环、码环进行辅助跟踪,获得比单独GPS系统更高的精度和更强的抗干扰能力[3-9]。国外在1990年前后已经进行了深组合系统的实验研究,并在1997年得到了应用。从2001年开始,美国绝大部分主战飞机上已经采用深组合技术的EGI(Embedded-GPS/INS)逐步取代单GPS接收机,并最终淘汰单GPS接收机。
我国正在建设和运行的Compass/北斗导航系统是全球导航卫星系统(GNSS)的重要组成部分。北斗系统的发展分为三步:验证系统、扩展的区域导航系统和全球导航系统[10]。目前,其整体性能低于GPS,主要不足有:定位精度低;易受无线电干扰;保密性与安全性差;数据输出率低等,而这些不足正好可以由INS来弥补。北斗系统与INS的组合是发展趋势,此组合导航系统不依赖于GPS,具有完全的自主性,对我国国防建设具有极大的现实意义。北斗导航系统与INS的组合主要表现为位置信息的组合[11-13],为了实现北斗导航系统与INS的最优组合,采用深组合方式是必由之路。但是,由于受接收机研制能力的限制,对深组合方案的研究较少,基本停留在仿真设计阶段[13]。通过分析、评述国外INS/GPS深组合系统的发展现状,提出我国自主研制INS/北斗深组合导航系统需要解决的关键技术。
1 卫星导航与惯性导航的组合方式及特点
根据不同的应用要求,INS和GPS有不同层次的组合。目前对组合导航的体系结构还没有统一的划分标准,按照GPS组合介入的深度,可分为松组合(松耦合)方式(Loosely-Coupled Integration)、紧组合(紧耦合)方式(Tightly-Coupled Integration)和深组合(也称极紧耦合、超紧耦合)方式(Deeply-Coupled Integration)[3-9]。
1.1 松组合方式
松组合方式是利用INS和GPS的位置和速度信息进行组合。如图1所示,INS和GPS输出的位置和速度信息的差值作为观测量。以INS为主,在GPS可工作时,GPS的导航解作为观测量输入数据融合滤波器,通过扩展Kalman滤波(Extended Kalman Filter)对INS的速度、位置、姿态以及传感器误差进行最优估计,并根据估计结果对INS进行输出或者反馈校正,使其保持高精度的导航;在GPS不可工作期间,INS单独工作,输出惯性导航解。该组合方案结构简单、易于工程实现,且导航信息有一定冗余度。但是,当载体进行高动态机动或GPS接收机受环境干扰影响而长时间不能工作时,该系统的精度将随时间增加而急剧下降,可靠性和抗干扰能力较差。
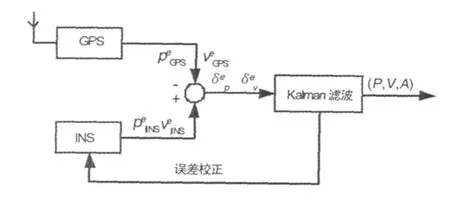
图1 GPS/INS的松组合方式
1.2 紧组合方式
如图2所示,GPS接收机与INS作为传感器分别输出伪距、伪距率及加速度、角速度信息。根据GPS接收机收到的星历信息和INS输出的位置和速度信息,计算相应于INS位置的伪距和伪距率,把该值与GPS接收机测量得到的伪距和伪距速率的差值作为观测量。通过EKF对INS的误差和GPS接收机的误差进行最优估计,然后对INS进行输出或者反馈校正。由于不需要得到GPS的独立导航解,并可对GPS接收机的测距误差进行建模,因此紧组合方式具有更高的组合精度,而且在可见卫星少于4颗时也可以使用。紧组合的优点是对GPS信号的抗干扰能力大大增强,整个组合导航系统的结构更为简单,从而提高了系统精度。
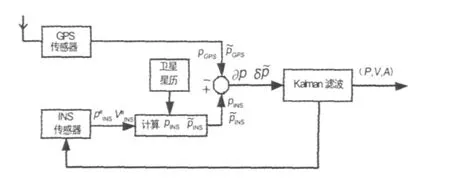
图2 GPS/INS的紧组合方式
1.3 深组合方式
深组合是使用惯性导航信息对GPS接收机进行辅助导航的组合方式,突出强调针对GPS接收机的辅助,如图3所示。观测量由INS导航结果推算的伪距、伪距率与GPS观测得到的伪距、伪距率作差得到。通过EKF对INS的误差进行最优估计,同时利用校正后的INS速度信息对GPS接收机的载波环、码环进行辅助跟踪,消除载波跟踪环和码跟踪环中载体的大部分动态因素,以降低载波跟踪环和码跟踪环的阶数,从而减小环路的等效带宽,增加GPS接收机在高动态或强干扰环境下的跟踪能力。嵌入式组合将INS和GPS进行一体化设计,通过共用电源和时钟等措施进一步减小体积、降低成本和减小非同步误差的影响。
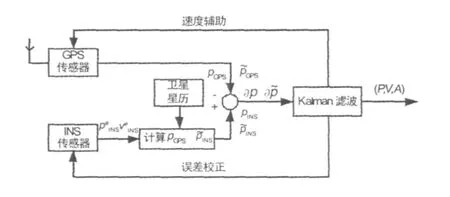
图3 GPS/INS的深组合方式
深组合方式的优点是:无量测输入相关问题,GPS接收机充分利用INS提供的辅助信息,组合系统导航精度高、抗干扰能力强;在可见卫星少于4颗的情况下,也能在较短的时间内正常工作。其缺点是:需要进行繁琐的星历计算和延迟误差补偿,计算量较大,降低实时导航的性能;需要严格的时间同步设计;要求GPS接收机输出伪距、伪距率和卫星星历等原始测量数据。
2 国外深组合导航技术的发展现状
2.1 国外采用的深组合方案
国外普遍采用以下5种深组合方案[14]:
1)常规模式
根据INS信息和GPS卫星星历计算载体相对GPS卫星的伪距和伪距变化率,与GPS接收机输出的伪距和伪距率作差,作为Kalman滤波器的测量信息,对INS的误差进行滤波估计,以提高GPS的精度;同时,校正后的INS速度信息用于辅助GPS码环锁相过程,增强了GPS接收机快速捕获GPS卫星信号和抗干扰的能力。该方案原理简单,较容易实施。但存在一个正反馈过程,容易导致系统不稳定。GPS接收机码环处于窄带状态,时间常数较大,跟踪误差和时间与INS的状态相关;而且Kalman滤波器的量测噪声是有色噪声,必须对有色噪声精确建模才能提高INS/GPS组合系统的性能。
2)对码环跟踪误差建模
该模式是针对常规模式存在的问题提出的,即对有色噪声精确建模,并消除正反馈作用。相应于GPS接收机一阶或二阶码跟踪环,可建立一阶或二阶跟踪误差模型。该模式的优点是提高了Kalman滤波器量测模型的精度,可改善INS/GPS组合系统的不稳定性,但没有消除问题的根源,且增大了计算量。
3)解相关伪距法
该模式改变了GPS码环编排方式,添加了跟踪误差估计器,获得具有白噪声特征的量测残差,使得Kalman滤波器的估计结果最优,消除了跟踪误差相关问题,去除了Kalman滤波器不稳定的根源。其缺点是对GPS码环进行了重新编排,实施难度较大。
4)滤波跟踪法
该模式取消了解相关伪距法中的比例控制环节,让Kalman滤波器在估计INS与GPS误差的同时,参与码环滤波,并将Kalman滤波器的最优估计结果作为初值提供给码环C/A码发生器。其优点是在获得理想量测输入的同时,增强了回路的抗干扰能力。但因取消了比例控制,动态跟踪性能较解相关伪距法稍差。
5)码误差跟踪法
该模式用相关器控制回路取代码环,Kalman滤波器直接跟踪码误差,INS的伪距和伪距率分别加入C/A码发生器和驱动码数控振荡器NCO,Kalman滤波器的量测残差直接来自GPS接收机的相关检测网络。其优点是Kalman滤波器的量测输入取自伪距残差,消除了误差根源,根据量测残差的大小控制相关器的过零点。因而,大大提高了系统对INS误差的容限;同时,Kalman滤波器被包在跟踪环路之中,带宽很窄,提高了系统对干扰的容限。
上述国外流行的五种深组合模式中,常规模式是传统的做法,存在一定的缺陷;其他四种模式都不同程度地涉及GPS接收机内部的编排,甚至重新设计,要求精通北斗接收机的原理和内部结构,并在研制接收机时进行内部编排,实施难度较大。
2.2 未来深组合发展的关键技术
2.2.1 信息融合技术的应用
任何单一传感器的导航均可能在特定时间、特定地点失效,多源传感器融合导航是导航应用的重要研究课题。在组合导航系统中,如何将两种数据进行融合是决定导航定位精度的关键问题。多源传感器数据融合的基本原理是通过对多传感器及其观测信息的合理支配和使用,把多传感器在空间或时间上的冗余或互补信息依据某种准则来进行组合,以获得被测对象的一致性解释或描述。
最经典的融合导航思想是基于集中式Kalman滤波的设计思想。多源传感器数据融合的算法有分布滤波法、联邦滤波法、动、静态滤波法、基于观测信息的融合导航、基于局部几何导航解的融合导航等,但不同算法之间存在理论和计算方面的差异,得到的效果也是不一样的。在硬件确定的条件下,软件算法是决定组合效果的关键因素[15]。
2.2.2 自适应Kalman滤波技术
Kalman滤波器作为一种最优的估计工具,已经在组合导航中获得了广泛使用。美国空军航空电子实验室在为下一代军用飞机进行的 CFK(Common Kalman Filter)研究计划中指出,组合导航信息处理的关键技术仍然是Kalman滤波[1]。
可靠的Kalman滤波算法要求有可靠的函数模型、随机模型以及合理的估计方法。然而运动物体一般难以确保规则运动,因而构造精确的函数模型十分困难;随机模型先验信息的获取一般都是基于验前统计信息,而任何统计信息都有可能失真,尤其是难以精确表征当前物理现实和观测现实。对于Kalman滤波的不稳定问题,目前的主要研究工作是针对由于模型不准确以及观测噪声或模型噪声方差阵不能反映实际噪声而引起的滤波发散问题。
基于此目标函数,配电网重构是为了使网损尽可能小,即求解目标函数最小值。但评价个体时一般用其适应度函数,习惯将算法优化方向对应适应度值增加方向,所以选择将目标函数的倒数作为适应度函数,考虑到不可行解,因此个体适应度函数确定为:
自适应滤波是解决由于模型及噪声统计不准确而引起估计误差的一种方法。由估计过程自适应地调整和更新先验信息,代表Kalman滤波具体实现问题中的一个重要研究方向[16-17]。统计学界和工程应用领域已经构造了多种自适应Kalman滤波算法,如基于开窗逼近法估计观测信息和状态误差协方差阵的Sage-Husa滤波、动态偏差去耦估计、模型方差自适应补偿法、虚拟噪声补偿法等。这些方法在一定程度上提高了Kalman滤波对噪声的抗差性。为了抑止模型误差对滤波导航解的影响,相继提出并使用的滤波方法有衰减记忆滤波方法、有限记忆滤波方法、快速自适应滤波算法、渐消滤波法和抗差自适应Kalman滤波法等[16]。
2.2.3 并行处理技术
并行处理技术的研究促进了分散化Kalman滤波技术的发展。分散化滤波是通过分解和简化算法来提高Kalman滤波的实时性的,是并行处理的软件实现。心动阵列的提出是解决Kalman滤波实时性问题的又一次质的飞跃。它由功能相同或相近的处理单元,按照某种规则构成一种阵列结构,很适合于VLSI技术来实现。自 Andrews和Jover-Kailath开拓性的工作以来,并行Kalman滤波及其心动阵列的实现至今已提出了许多新的不同结构形式的实现方案。对组合导航系统Kalman滤波实时性问题的研究,已经引起了专家和学者的重视,并做了一些尝试性的工作[1]。
3 我国自主研制深组合导航系统的关键技术
根据我国目前相关技术的发展水平和实际情况,自主研制INS/北斗深组合导航系统需要突破以下关键技术:
1)北斗导航系统的兼容性与互操作
包括北斗导航系统的频率兼容性与互操作、时间系统的兼容性与互操作、坐标系统的兼容性与互操作。北斗导航系统由于起步较晚,其发展面临严峻的挑战,为了提高性能在日益竞争的导航定位市场中占有优势,系统建设必须注重与其他导航系统的兼容性与互操作[10]。
2)深组合方案研究
采用不同的组合方案,实现的难易程度和组合效果是不一样的。目前,虽然国外已经实现了有关方案,但没有相关的详细报道,而国内只是停留在仿真阶段。因而,可参考的资料不多,有必要对深组合方案进行详细研究[14]。
3)硬件实现
由于深组合模式不同程度地涉及北斗接收机内部的编排,甚至重新设计。因此,要求精通北斗接收机的原理和内部结构,在研制接收机时进行内部编排,且不显著增加接收机的成本和复杂性,从而实现INS、北斗接收机和导航计算机的一体化。
4)信息融合技术
在深组合系统中有INS辅助信息和北斗输出信息,对其采用不同的融合方案,得到的效果也是不一样的。国内的研究机构在系统实现、组合算法和算法的软件实现等方面已作了大量工作[15,17]。
Sigma-Point Kalman滤波与扩展 Kalman滤波相比较,更适合于深组合系统。在最小二乘原则下,多传感器动、静态合成滤波、基于各传感器观测信息的融合滤波、基于各传感器局部导航解的融合滤波均等价。动、静态合成滤波和基于各传感器观测信息的融合滤波具有更强的容错能力,容易应用方差分量估计平衡各传感器信息对导航结果的贡献。联邦滤波和基于局部几何导航解的融合滤波纠错能力相对较弱。在实践中应尽量使用动、静态合成滤波和基于观测信息的融合滤波[15]。基于抗差估计原理和自适应估计原理构造的抗差自适应Kalman滤波,对观测信息采用抗差估计原则,若观测信息含有粗差,则相应的等价权矩阵元素减小,从而可以控制观测异常对状态参数估值的影响;自适应因子作用于预测状态向量的协方差矩阵,若动力学模型异常,则相应的自适应因子减小,从而可以控制状态模型预报信息异常对状态参数估值的影响,自适应因子起着调节动力学模型信息与观测信息的功能[16]。
5)试验验证
由于实际应用环境比较复杂,往往很难达到理论分析或实验室所得到的效果,进行各种复杂环境下的试验验证是改进设计和提高性能的保证。
4 结 论
组合导航系统有利于充分发挥各导航系统的优势,可以获得优于单一导航系统的性能,是目前导航系统发展的方向。深组合方式是导航系统组合的最优方法,可以获得比单独导航系统更高的精度和更强的抗干扰能力。在现代高技术战争的背景下,INS/北斗组合导航系统的作用和地位日益突出。为了充分发挥北斗导航系统与INS的组合优势,应根据我国目前相关技术的发展水平和实际情况,预先研究INS与北斗导航系统的深组合方式,突破自主研制INS/北斗深组合导航系统的关键技术。
[1] 衣 晓,何 友.多传感器组合导航系统评述[J].火力与指挥控制,2003,28(4):1-4.
[2] 张国良,曾 静.组合导航原理与技术[M].西安:西安交通大学出版社,2008:31-46.
[3] Goda S,Cannon M E.GPS/MEMS-INS integrated system for navigation in urban areas[J].GPS Solut,2007,11(5):193-203.
[4] Jonathan M N.A Tightly-Coupled INS/GPS Integration Using a MEMS IMU[D].Air Force Institute of Technology Air University,2004.
[5] 周星伶.GPS/INS组合导航系统松、紧耦合性能比较[J].航空电子技术,2007,38(4):1-6.
[6] 周坤芳,李德武,周湘蓉.干扰环境下GPS/INS组合模式研究[J].中国惯性技术学报,2004,12(4):24-27.
[7] 周坤芳,孔 键,周湘蓉.紧耦合GPS/INS组合导航能力的分析[J].中国惯性技术学报,2005,13(6):50-54.
[8] 韩军海,谢 玲,陈家斌.INS/GPS组合导航方式及应用前景[J].火力与指挥控制,2002,27(4):66-68.
[9] 谭述森.卫星导航定位工程[M].北京:国防工业出版社,2007.
[10] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6.
[11] 刘子民,何广军,白 云,金凤杰.SINS/北斗双星组合导航系统研究[J].战术导弹控制技术,2006,54(3):41-42.
[12] 乔 洋,赵育善,赵金才.惯性导航/双星组合导航的可行性研究[J].上海航天,2003(4):34-37.
[13] 罗建军,袁建平.惯导/双星定位组合导航方案与精度分析[J].全球定位系统,2005,30(2):41-46.
[14] 陈 偲,王可东.惯性导航与卫星导航紧耦合技术发展现状[J].全球定位系统,2007,32(3):21-26.
[15] 杨元喜.多传感器融合导航方法的比较[J].测绘科学与工程,2006,26(2):1-3.
[16] 杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006:186-215,281-307.
[17] 唐康华,吴江平,胡小平.MEMS-IM U/GPS组合导航中的多模态Kalman滤波器设计[J].中国惯性技术学报,2007,15(3):307-311.
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
测绘科学与工程(2017年3期)2017-08-16 02:46:08
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
测绘通报(2016年12期)2017-01-06 03:37:13
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04