GNSS自适应抗干扰软件研发平台
2010-04-26 06:36文贵宏吴仁彪刘海涛
全球定位系统 2010年6期
文贵宏,李 晓,吴仁彪,刘海涛
(中国民航大学天津市智能信号与图像处理重点实验室,天津300300)
0 引 言
GPS是具有海、陆、空全方位实时三维(时间、速度、方位)导航与定位能力的新一代卫星导航系统。它是美国从上世纪70年代初开始规划研制,历时20余年,耗资200余亿美元。作为一种通用的导航定位系统,GPS有着许多其他导航系统无可比拟的特性,在民用和军用定位与导航中获得了广泛的应用。但是由于信号到达地面时极其微弱,GPS极易受到环境和人为的干扰。有关研究表明[1]:一个发射功率为1W的GPS干扰机可使100 km范围内民用/粗捕获码的(C/A码)的接收机失灵,而10 km的干扰机就可使10 km的精码(P码)接收机失灵;在二次海湾战争中[2-3],伊拉克使用了俄制GPS接收机对美国的GPS系统实施了有效干扰,使美国的巡航导弹发生了不同程度的偏离,有的甚至落到土耳其境内。因此,提升GPS的抗干扰能力已成为当前研究的一个热点。
目前,大量GPS抗干扰研究工作仅针对一两种算法进行比较研究,算法性能主要通过仿真数据验证比较,且不同研究工作所使用的仿真环境及参数差异较大,因此,无法对该领域内的抗干扰算法有一个准确、完整的认识。本课题组在国家863项目支持下,研究实现了多种抗干扰算法,并已获授权国家发明专利3项,申请国家发明专利9项,在此基础上,设计实现了卫星导航系统自适应抗干扰软件[4]研发平台。该研发平台集成了数据产生单元、自适应抗干扰算法单元、GPS软件接收机单元及定位结果显示单元;它可仿真验证、评测不同类型抗干扰算法对GPS接收机捕获、跟踪及定位性能影响;此外,借助该平台可开展GPS抗干扰接收机工程设计、实现及算法优化等方面的工作。
介绍了自适应抗干扰研发平台的组成与功能,并对平台所集成的算法思想及特点做了简单介绍,最后,用仿真数据与实测数据对其中的几种算法进行了验证。实验结果表明:自适应抗干扰研发平台对仿真数据及实测数据定位误差均在可接受范围内。
1 系统组成
图1为自适应抗干扰研发平台框图,平台主要由数据产生单元、抗干扰算法单元、GPS软件接收机单元、定位结果显示单元组成。
1.1 数据产生单元
自适应抗干扰研发平台的数据产生单元包括实际数据采集模块和仿真数据生成模块。实际数据采集模块主要由采集前端、A/D转换器和干扰源构成。采集前端采用加拿大Novatel公司生产的SUPERSTARII GPS接收机OEM板卡;A/D转换器采用台湾凌华公司的PCI-9812采集卡,采集卡具有四个输入通道,其最高采样频率可达20 MHz,采样位宽为14 Bit,中频频率为4.309 MHz;干扰源为惠普8657B型信号发生器,产生一个频率为 1575.42 MHz的调频信号,利用天线发送到GPS接收天线附近。仿真数据生成模块可根据需要,通过选择卫星星号、改变信噪比、改变干扰源类型、选择阵列类型来生成所需的阵列数据。
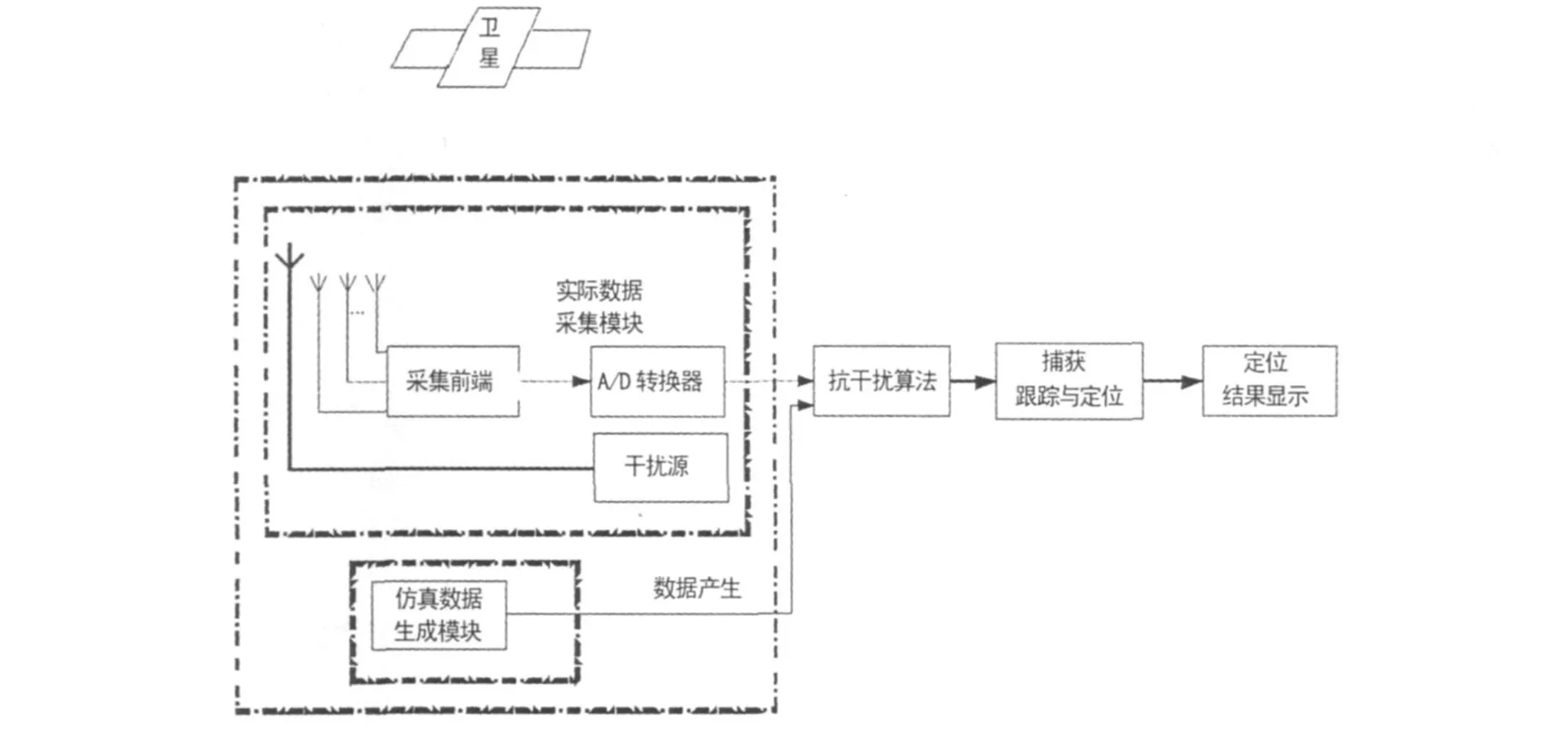
图1 自适应抗干扰研发平台框图
1.2 抗干扰算法单元
自适应抗干扰研发平台集成了十种抗干扰算法,十种抗干扰算法分为三类:时域抗干扰算法、空域抗干扰算法、空时域抗干扰算法。时域算法包括自适应FIR滤波器;空域抗干扰算法包括:空域最小功率算法;空域CAPON算法;空域解重扩算法;通用的多类干扰抑制算法;C2AB算法;常规多波束形成算法。空时域抗干扰算法包括:空时最小功率算法;空时CAPON算法;空时解重扩算法。限于篇幅,这里仅简单介绍各个算法的基本思想及特点。
1)自适应FIR滤波器
自适应FIR滤波器是在保证某一支路加权值为常数的条件下,使横向滤波器输出功率最小。该算法具有无须知晓干扰信号的先验信息,就可以在干扰频率处形成零陷,达到抑制干扰的目的。它具有运算复杂度低、运算速度快的优点,算法的不足之处在于不能抑制同频干扰。
2)空域最小功率法[5]
空域最小功率法是直接将阵列的输出作为误差信号,追求均方误差最小从而使列输出最小。其优点在于不需要预先知道信号结构和方向就可在强干扰的情况下获取微弱的有用信号,算法流程比较简单。但该算法对信号不形成增益,并且,对信号有一定的衰减。
3)空域CAPON算法
空域CAPON算法的基本思想是在保证有用信号无失真通过的条件下使输出功率最小化。该算法流程比较简单,对信号能形成增益,抗干扰能力较强,抗干扰后的数据定位精度高;不足之处在于需要知道卫星信号来向。
4)空域解重扩算法[6]
解重扩算法的基本思路是在接收端对发射信号进行自适应波束形成时,发射信号在时间周期内的信号波形可以利用该发射信号的扩频码对检测出的数据进行重新扩频来得到。解重扩算法的优点在于不需要知道任何信号的先验信息就可以有效的去除干扰,抗干扰能力较强;但算法流程比较复杂。
5)通用的多类干扰抑制算法[7-8]
该算法的基本思想是将阵列接收数据向干扰正交补空间投影以抑制欺骗式干扰和压制式干扰,并对投影后的无干扰数据进行低副瓣常规波束形成来减轻多径干扰的影响,达到同时抑制多类干扰的目的。该算法能够同时抑制欺骗式干扰、压制式干扰和卫星多径信号干扰,并对GPS信号提供信号处理增益,不足之处在于,需要已知信号来向信息,并且需要采用较大阵列,一般适用于多类干扰共存的地面场景中的GPS干扰抑制。
6)C2AB算法[9-11]
C2AB算法的基本思路是先利用干扰正交补空间投影方法抑制干扰,采用CLEAN算法估计卫星来向信息,从而获得静态加权矢量,对阵列数据加权来增强GPS信号。本算法适用于卫星来向未知的环境;由于是估计信号来向,其抗干扰能力相对较差。
7)常规多波束形成算法[12-13]
常规多波束形成算法的基本思路是先利用干扰正交补空间投影方法抑制干扰,根据俯仰角(-60°,60°)之间假定的卫星来向获得静态加权矢量,对阵列数据加权来增强GPS信号。本算法不需要知道信号来向,仅适用于小阵元数的情况。
8)空时最小功率算法
空时最小功率算法的基本思想与空域最小功率算法相同,但具有更多空域时域自由度,能够更有效地消除干扰,但不足之处与空域最小功率法相同,即不能够在信号方向形成增益。
9)空时解重扩算法[14]
算法基本原理与空域解重扩算法基本相同,但具有更多空域时域自由度,能够更有效的消除干扰。由于STAP的结构使之在处理带宽上不能有一致的频率响应[12],会造成接收到的卫星信号失真,使阵列输出和本地信号间的互相关函数出现主瓣展宽,互相关峰值偏移等现象,影响GPS信号的捕获及用户位置的确定。为了补偿这种影响,必须对信号进行均衡处理,才可能做到全盲自适应处理,提高算法的鲁棒性。本平台采用同态滤波[15]、权值约束[16]、最小二乘逆滤波[17]三种均衡方法,文献[12]对三种均衡方法的性能做了深入的分析研究。
10)空时CAPON算法
基本原理与空域CAPON算法基本相同,但具有更多空域时域自由度,能够更有效的消除干扰。空时CAPON算法存在与空时解重扩相同的问题,即由于STAP的结构会造成接收到的卫星信号失真,影响GPS信号的捕获及用户位置的确定。因此,自适应抗干扰研发平台采用同态滤波、权值约束、最小二乘逆滤波三种均衡方法对空时CAPON算法进行均衡。
1.3 GPS软件接收机单元
该单元对抗干扰后的基带信号进行捕获、跟踪与定位处理,最后,获取GPS终端的位置信息。捕获过程利用具有快速算法的FFT在频域内完成,主要功能是搜索GPS信号中存在的卫星星号,并得到其载波初始频率与C/A码码相位;跟踪环利用捕获得到的码起始相位和载波频率作为跟踪环的起始值,通过码跟踪环和载波跟踪环(Costa环)进行跟踪,实现本地参考信号对输入信号的准确同步,从而对GPS信号进行解扩和解调,获得进一步精确的载波频率、C/A码相位以及准确的导航电文;定位过程从跟踪解调后的导航数据中提取卫星星历并计算伪距信息,通过最小二乘法计算出用户位置。
1.4 显示单元
GPS软件接收机单元得到的定位结果转换成NMEA-0183格式,并通过计算机串行口发送出去。显示单元从计算机串行口读取定位信息并显示在以下图形界面中。
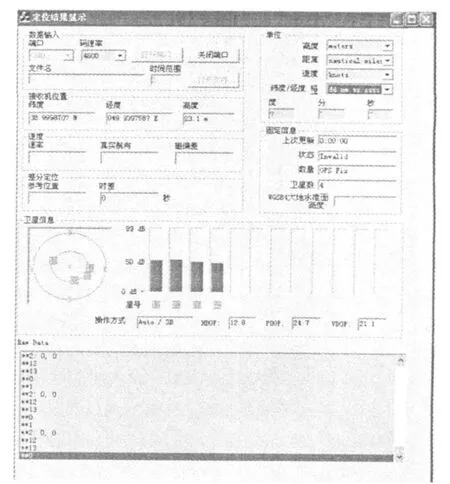
图2 显示单元的图形界面
2 数据测试验证
只介绍三种算法的验证结果。对仿真数据选择空域最小功率法、空域解重扩抗干扰算法与空域CAPON算法;对实采数据选用空域最小功率算法、C2AB算法及空域解重扩算法进行抗干扰处理。
2.1 仿真数据验证
利用仿真数据生成模块所生成的卫星数据参数为采样率为6 MHz,中频为4.309 MHz;干扰信号为窄带干扰,干扰来向为-20°,信噪比SNR为-18 dB,干噪比JNR为20 dB;经纬度设为北纬39°、东经50°;加入四颗卫星的信号,卫星星号分别为1#、13#、20#、22#;其信号来向分别为-40°、10°、40°、70°。选用空域最小功率算法、空域解重扩抗干扰算法与空域CAPON算法进行抗干扰处理。
图3为三种方法的阵列方向图,从图中可以看出,空域最小功率算法在干扰方向形成零陷,在卫星信号方向上没有增益;空域解重扩算法在干扰方向形成零陷,并在卫星信号方向上形成增益;空域CAPON算法在干扰方向上形成零陷,并在卫星信号方向上形成增益。图3说明了三种算法都对干扰进行了抑制,空域解重扩算法和空域CAPON算法对信号形成了增益。
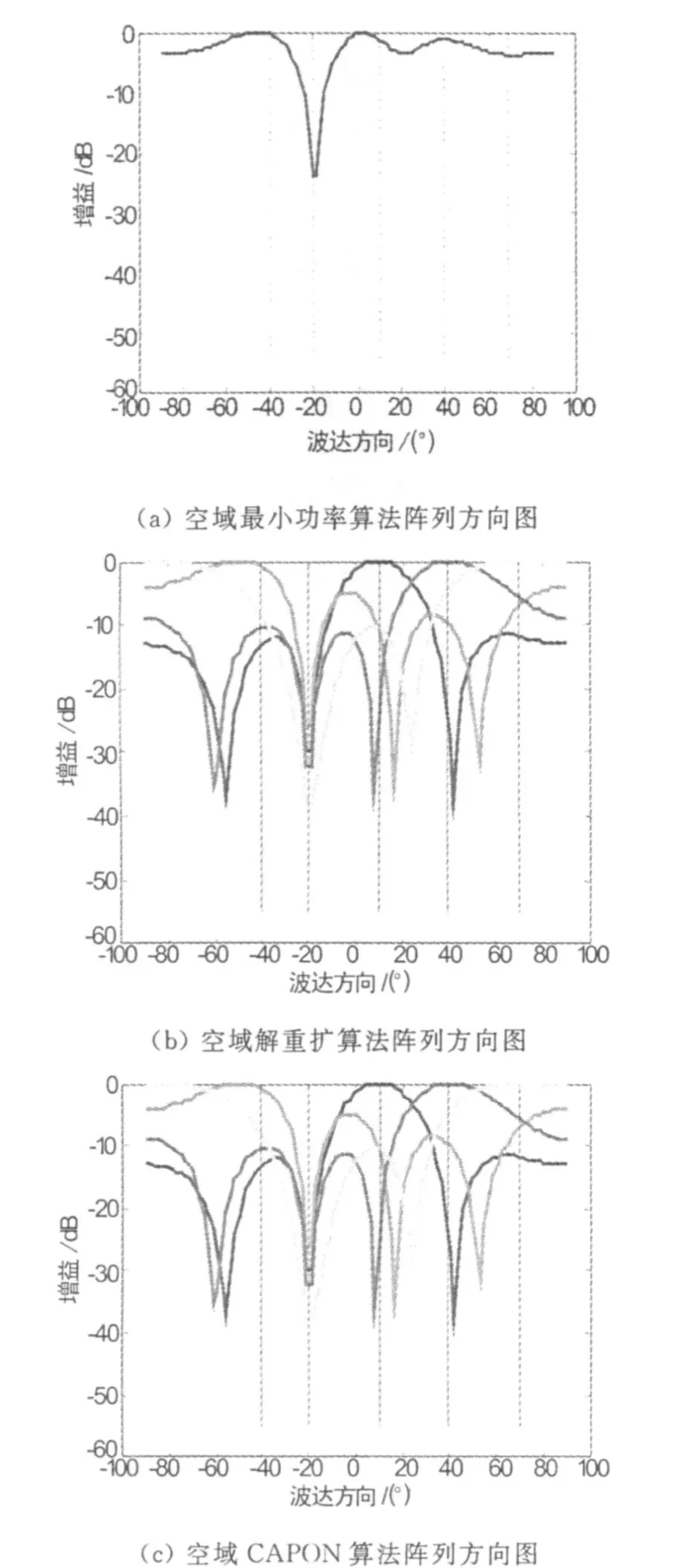
图3 三种抗干扰算法的阵列方向
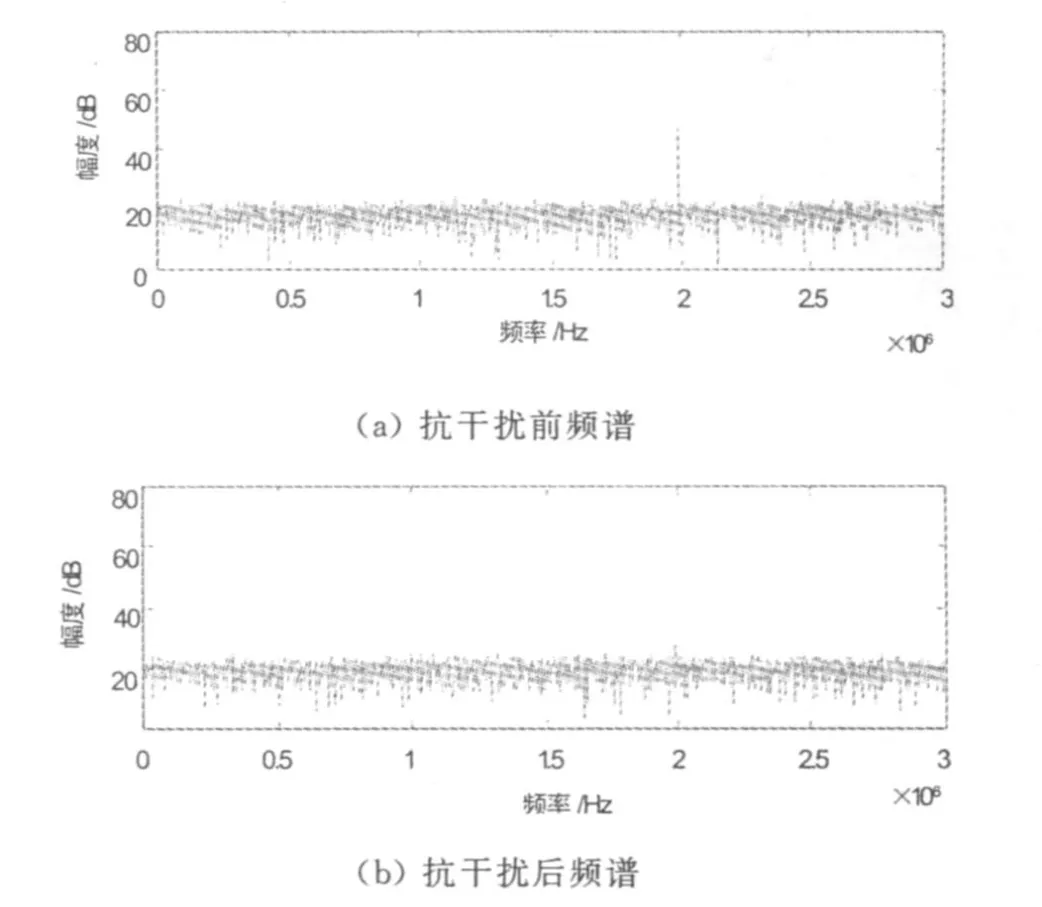
图4 空域最小功率法抗干扰前后的频谱图
图4为空域最小功率法抗干扰前后的频谱图,从图中可以看出,抗干扰之前信号在中频上有一个干扰,经过抗干扰处理,干扰得到了有效的抑制。
固定其他参数,改变随机噪声,多次计算得到统计定位误差如表1所示。
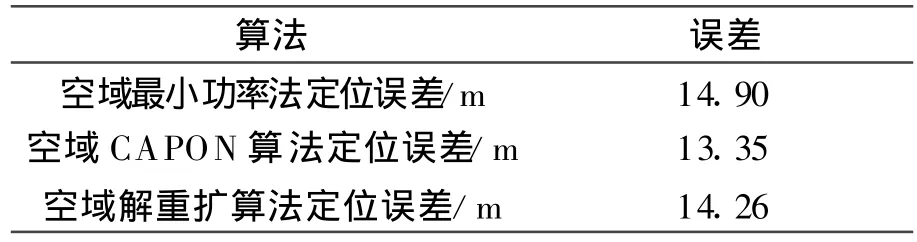
表1 仿真数据定位误差(二维平面误差)
从实验结果可以看出,研发平台对仿真数据的定位误差较小。
2.2 实测数据验证
利用实际数据采集模块采集数据,实采数据采样率为5.714 MHz,中频为4.309 MHz,干噪比为15 dB。选用空域最小功率算法、C2AB算法及空域解重扩算法进行抗干扰处理。图5为空域最小功率法抗干扰前后的频谱图,从图中可以看出,带干扰的卫星信号经过抗干扰处理后,干扰信号得到了有效的抑制。表2所示为实测数据的定位误差,从实验结果可以看出,研发平台对实采数据的定位误差较小。
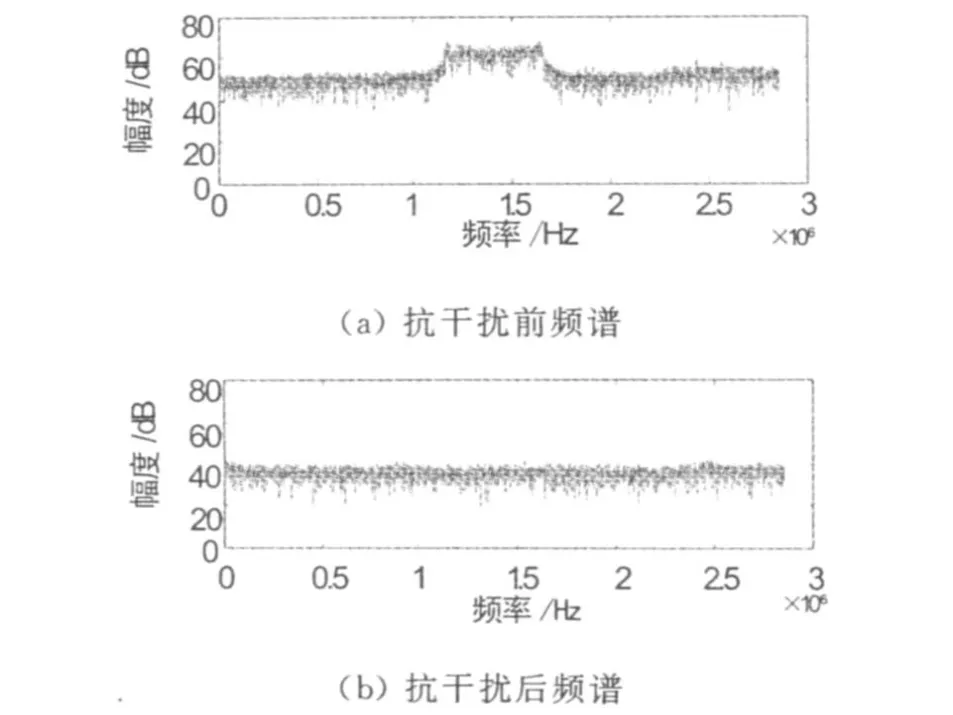
图5 空域最小功率法抗干扰前后的频谱比较
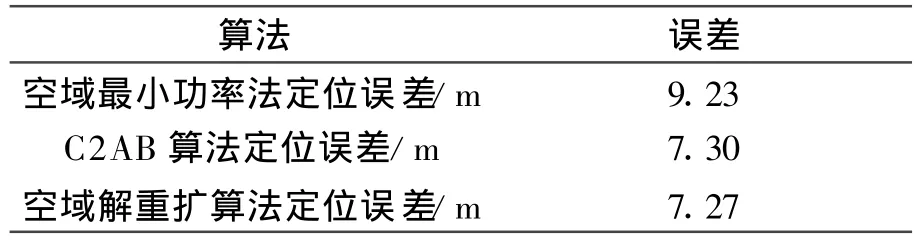
表2 实采数据定位误差(二维平面误差)
3 结 论
介绍了卫星导航自适应抗干扰研发平台的功能及其组成,重点介绍了十类自适应抗干扰算法的基本思想及抗干扰性能。最后,通过计算机仿真及实采数据验证了自适应抗干扰研发平台的抗干扰性能。自适应抗干扰研发平台对GPS抗干扰算法的工程设计实现具有重要意义,相关研究也可应用于伽利略等卫星导航系统与北斗二代导航系统。
[1] 李文革,黄小利,谢世富.导航战在信息化战争中的作用[J].信息与电子工程,2004,2(2):153-156.
[2] 何立萍.从伊拉克战争看GPS干扰和抗干扰的发展[J].航天电子对抗,2004(1):15-18.
[3] 孙智信.GPS导航系统的电子攻防对抗研究综述[J].航天电子对抗,2001(1):5-11.
[4] 吴仁彪,刘海涛,胡铁乔.卫星导航系统自适应抗干扰软件:受理号:中国,2010R11S006079.
[5] Compton R T.The Power Inversion Adaptive Array:Concept and Performance[J].IEEETrans.on AES,1979,15(6):803-814.
[6] 卢 丹,吴仁彪,王 磊,等.一种基于码字结构的盲自适应GPS干扰抑制方法:中国,200910069091.3[P].2009-10-21[2010-02-16].
[7] 吴仁彪,卢 丹,李 婵.通用的卫星导航系统中多类干扰抑制方法:中国,200910067774.5[P].2009-07-08[2010-02-16].
[8] 卢 丹,吴仁彪,王 磊.一种通用的GPS多类干扰抑制方法[J].信号处理,2010,26(5):682-686.
[9] 吴仁彪,卢 丹,刘海涛.基于单通道单延迟互相关处理的GPS干扰抑制方法,中国,201010100159.2[P].2010-01-22[2010-02-16].
[10] 吴仁彪,卢 丹,胡铁乔,等.基于单通道多延迟互相关处 理 的 GPS干 扰 抑 制 方 法:中 国,201010102833.0[P].2010-01-02[2010-02-16]
[11] 吴仁彪,卢 丹,刘海涛,等.基于多通道单延迟互相关处 理 的 GPS干 扰 抑 制 方 法:中 国,201010102866.5[P].2010-01-29[2010-02-16].
[12] Huang W,Lu Dan,Wu R B,Su Z G.A Novel Blind GPS Anti-jamming Algorithm Based on Subspace Technique[C]∥2006 8th International Conference on Signal Processing Proceedings(ICSP'06,proceedings),Guilin China,2006:447-450.
[13] 王 磊.基于子空间技术的常规多波束形成抗干扰算法[C]∥北京:第一届全国卫星导航学术年会论文集,2010.
[14] 吴仁彪,卢 丹,李 杰,等.一种基于解重扩技术的空时盲自适应 GPS干扰抑制方法:中国,201019102025.1[P].2010-02-08[2010-02-16].
[15] 吴仁彪,徐如兰,卢 丹.基于同态滤波的GPS空时自适应处理补偿技术[J].中国科学:物理学力学天文学,2010,40(5):554-559.
[16] Hatke G F.Adaptive array processing for wideband nulling in GPS system[C]∥In:Signals,Systems Computers.Conference Record of the Thirty-Second Asilomar Conference.PacificGrove,California:Omnipress,1998:1332-1336.
[17] Li S G,Cheng Z,Huang F K.A compensating approach for signal distortion introduced by STAP[J].Communication Technology,2006(11):1-4.
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
军民两用技术与产品(2021年10期)2021-03-16
导航定位与授时(2020年5期)2020-09-23
科技视界(2020年8期)2020-05-18
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
中学生数理化·八年级物理人教版(2019年6期)2019-06-25