
双馈风力发电机的变论域模糊控制
2010-04-25 13:39李树江
电气技术 2010年12期
李树江 周 玲
(沈阳工业大学信息科学与工程学院,沈阳 110870)
1 引言
双馈风力发电机在结构上类似于绕线式异步发电机,在连接上,它的转子侧通过双向变频器接到电网上,双向变频器充当交流励磁装置,进行交流励磁,定子侧是直接接在电网上,定子和转子两侧都能与电网进行能力的馈送,“双馈”由此得来。它之所以能被得到广泛的应用,是因为它既具有异步发电机的优点,又具有同步发电机的优点。双馈风力发电机与同步机一样,具有独立的励磁装置,该励磁装置是由电力电子器件组成的,通过调节励磁电压的频率、幅值、相位等控制系统的有功和无功。双馈风力发电机由于其优良的特性,具有良好的发展前景。
许多文献采用不同的控制方法对双馈风力发电机进行控制,文献[1]、[2]和[3]对功率控制采用的是普通PI控制,其控制性能的优劣和PI控制器参数选择有很大关系,系统自适应能力差,文献[4]采用的是常规模糊控制,由于模糊控制的不精确,系统存在一定的误差。而且双馈风力发电系统是很复杂的系统,风速的突然变化捕获到不同的功率使得发电机运行在不同的工况下,不同工况定会引起电机参数的变化,并且系统在运行时存在干扰,而文献[1]、[2]和[4]没有将这些因素考虑进去。
针对前面控制器存在的问题,自适应能力差以及控制精度不高,根据模糊控制器的本质就是插值器,采用变论域模糊控制形式可以使模糊控制达到高精度的控制效果[5]。本文设计了一套基于变论域模糊控制的高性能双馈发电机有功功率和无功功率解耦控制系统,基于Matlab/Smulink环境,在不同工况、参数改变情况下进行了试验。试验表明基于变论域模糊控制策略是可行的,实现了有功功率和无功功率的解耦控制,并具有自适应能力强和控制精度高的良好动态特性。
2 双馈风力发电机的数学模型
2.1 双馈风力发电机的基本模型
当定子和转子采用电动机惯例规定正方向,则可得双馈电机的数学模型[6-7]:
电压方程:
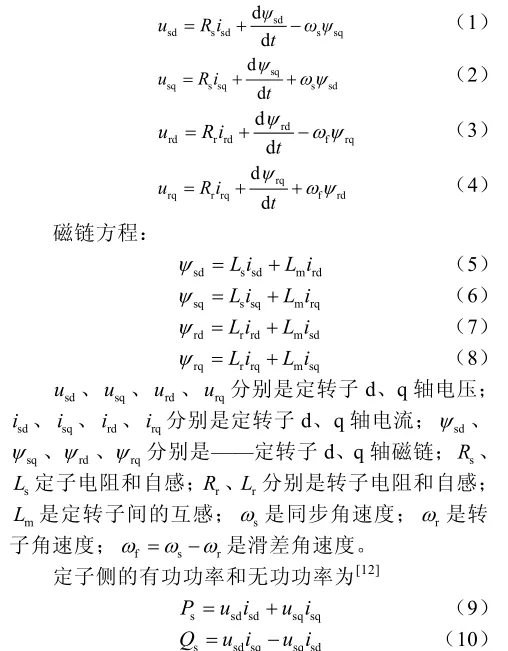
2.2 基于定子磁场定向的矢量模型
矢量控制技术是交流电机系统实现解耦控制的核心,而矢量控制的核心是要对电机定子电流的两个正弦交变分量进行独立控制和调节[8]。鉴于双馈风力发电机的定子侧是直接接电网,则定子侧电压等于电网电压,定子侧相对比较稳定,因此本文采用了定子磁场定向的矢量控制技术,即定子磁链ψs的方向与同步旋转坐标系 d轴的方向一致,则有ψs=ψsd,ψsq= 0,在正常工作状态下,发电机的定子绕组的电阻相对于它的电抗要小的多,可以忽略不计,即Rs=0;电网电压矢量比定子磁链矢量超前900,正好在q轴的正反向上,所以有usd= 0,usq=Us,其中Us为定子电压矢量的幅值。当电机的定子接在恒定的电网上时,Us为常数。由此可得:


将有功功率和无功功率当做被控制量,则被控系统[9]如图1所示。
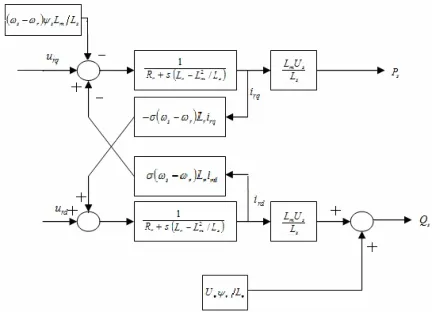
图1 被控系统框图
2.3 基于定子磁场定向矢量控制系统结构的简化
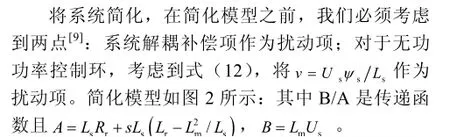

图2 DFIG的简化模型
3 双馈风力发电机变论域模糊控制器的设计
模糊控制具有良好的控制效果,但常规模糊控制器控制精度不高,存在稳态误差,而变论域模糊控制恰恰弥补了这一缺点,它通过加入伸缩因子,根据误差e和误差变化率ce调整彼此的论域,其实质就是在一定区间增加控制规则,从而达到更高精度控制。本文采用了双输入单输出的变论域模糊控制器,对系统功率环进行控制。
3.1 可变论域思想
控制规则对模糊控制效果的影响很大,并不是控制规则越多控制效果越好,因为变量过多,规则过于复杂,会使控制算法难以实现。考虑控制的目的:使系统的误差等于零或尽可能地趋于零,如果现在的误差初始论域为X=[−E,E],随着控制过程的动态变化,系统的误差也一定在变化,那么当误差向零靠近时,我们仍采用原来的论域进行推理控制的话,必然会造成控制精确的降低。因此,“可变论域”的思想被李洪兴教授在文献[5]中首次提出:所谓变论域是指论域Xi随着变量xi的变化进行自行调整,记之为


图3 变论域示意图
3.2 伸缩因子的选择

3.3 变论域模糊控制器的设计
本文采用双输入单输出的变论域模糊控制器[11]来实现对功率的解耦控制。有功功率变论域模糊控制结构图如图4所示,同样对无功功率采用同样的控制结构。
变量的模糊化。以有功功率调节为例,模糊控制器的输入为e(t) =Ps*−Ps和偏差变化率e˙(t) =e(t) −e(t−1),电流转子侧q轴电流作为输出,考虑到系统会在不同工况下运行,以及d轴会对q轴产生干扰,确定其初始论域分别为:[−6, 6],[−6, 6],[−6, 6],其模糊子集都为{负大,负中,负小,零,正小,正中,正大},即{NB,NM,NS,ZE,PS,PM,PB},并且各变量的隶属函数采用三角形函数。

图4 有功功率变论域模糊控制框图
模糊规则的确定。本系统采用的是双输入单输出形式的变论域模糊控制器,在总结技术人员知识的基础上经过反复调试建立了合适的模糊控制规则,如表1所示。
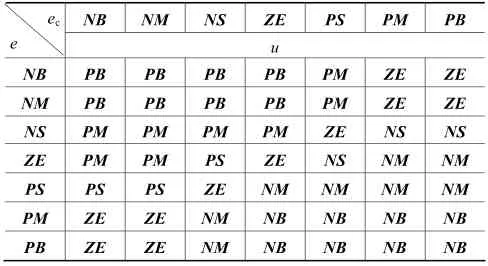
表1 模糊控制规则表
由表1可得:
模糊推理算法,在变论域模糊控制中,有三种常见的计算方法[11]:潜遗传法、显遗传法和逐步显遗传法。本文采用的是计算量相对少的潜遗传变论域自适应模糊控制算法,其计算公式

解模糊,本文采用的是最常用的重心法。
4 仿真与分析
本文进行了一系列的仿真试验,所使用发电机参数[6]为额定功率为2.2kW,相电压为380V,Ls=0.156125H;Lr=0.156125H;Lm=0.148H;Rs=2.470Ω;Rr=2.249Ω。
(1)给定无功功率为500var,有功功率给定值在0到0.9s之间是1200w,在0.9s到1.8s之间为2200W。
图5给出了参数改变前有功功率的阶跃响应及对无功功率的影响,由图5可知,在变论域模糊控制下有功功率很好的跟踪了设定值,在0.9s时有功功率的增加对无功功率产生了影响,但在变论域模糊控制的作用下无功功率很快恢复到原先设定的值,实现了有功和无功的独立控制。

图5 参数改变前有功功率的阶跃响应及对无功功率的影响图
图6给出了参数改变后有功功率的阶跃响应及对无功功率的影响。由于在运行过程中电机的各参数实际上是变化的,所以在试验过程中将电机的参数作如下变化:Ls=Lr变成原来的1/3倍;Lm原来的1/2倍;Rs和Rr变为原来的5倍。由图6可知,虽然参数变化对有功功率和无功功率跟踪造成了小的波动,但是仍然可以很好的跟踪设定值。
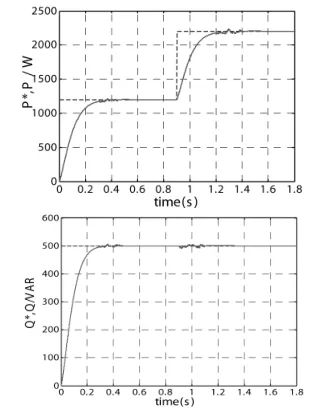
图6 参数改变后有功功率的阶跃响应及对无功功率的影响图
(2)给定有功功率为2200W,无功功率给定值在0到0.9s之间是500var,在0.9s到1.8s之间为200var。
图7给出了参数改变前无功功率的阶跃响应及对有功功率的影响,由图7可知,在变论域模糊控制下无功功率很好的跟踪了设定值,在0.9s时无功功率的减少对有功功率产生了影响,但在变论域模糊控制的作用下有功功率很快恢复到原先设定的值,实现了有功和无功的独立控制。
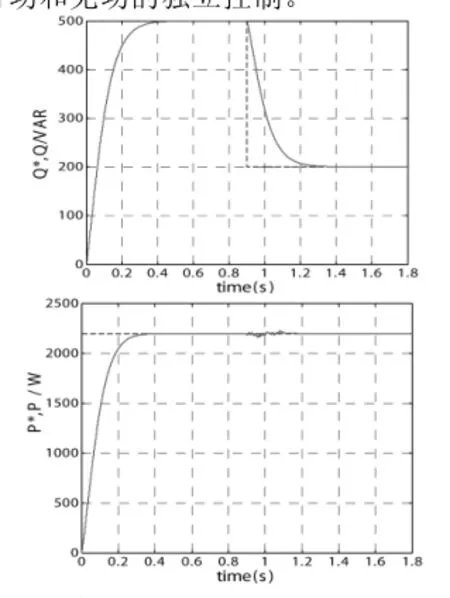
图7 参数改变前无功功率的阶跃响应及对有功功率的影响图
图8给出了参数改变后无功功率的阶跃响应及对有功功率的影响,由于在运行过程中,电机的参数会发生变化,因此将电机的参数作如下变化:Ls=Lr变成原来的1/4倍;Lm原来的1/3倍;Rs和Rr变为原来的3倍,由图8可知,虽然参数变化对有功功率和无功功率跟踪造成了小的波动,但是仍然可以很好的跟踪设定值。

图8 参数改变后无功功率的阶跃响应及对有功功率的影响图
变论域模糊控制器在参数变化前后都能实现系统有功功率和无功功率的解耦控制。
5 结论
本文设计了一套基于变论域模糊控制的高性能控制系统,并进行了变论域模糊控制的仿真研究和试验,对控制效果进行了分析。试验表明,在避免了参数选择对控制系统影响的同时,变论域模糊控制结合了常规模糊控制技术的鲁棒性和它自身的高精度性,使得整个系统具有良好的控制效果,提高的系统稳定性和控制精度。
[1] 于世涛,颜湘武,刘树勇等. 交流励磁发电机定子磁场定向矢量控制[J].华北电力大学学报,2005,32(2):10-14.
[2] 李亚林,李含善. 变速恒频风力发电系统的仿真研究[J].电力科学与工程,2007,23(3):1-5.
[3] M.A.Poller.Doubly-fed induction machine models for stability assessment of wind farms[J],in :Power Tech Conference Proceedings,2003,IEEE,Bologna.
[4] Kim Eel Hwan,Kim Jae Hong,Lee Gil Su.Power factoe control of a doubly fed machine using fuzzy logic [C].Proceedings of the Fifth International Confenrence on Electrical Machine and Systems, shenyang,2001.
[5] 李洪兴.从模糊控制的数学本质看模糊逻辑的成功[J].模糊系统与数学,1995,4(9):3-10.
[6] 应黎明,陈允平,陈明榜.异步化同步发电机转子励磁的模糊PID控制[J].中国电机工程学报,2006,26(17):163-168.
[7] 叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002.
[8] 王成元,周美文,郭庆鼎.矢量控制交流伺服驱动的电机[M].北京:机械工业出版社,1995.
[9] F.Poitiers*,T.Bouaouiche,M.Machmoum. Advanced control of a doubly-fed induction generator for wind energy conversion[J].Electric Powe System Research, 2009,79(2009):1085-1096.
[10] 李洪兴.非线性系统的变论域稳定自适应模糊控制[J].中国科学(E辑),2002,2(32):212.
[11] 李洪兴.变论域自适应模糊控制器[J].中国科学(E辑),1999,1(29):32-42.
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
天津教育·下(2018年9期)2018-07-13
广东石油化工学院学报(2016年3期)2016-05-17
电测与仪表(2015年16期)2015-04-12
体育科学研究(2015年5期)2015-02-28
大电机技术(2015年5期)2015-02-27
电力自动化设备(2013年11期)2013-09-18
