
四相无刷直流电动机控制系统研究
2010-04-25 13:39王淑红
电气技术 2010年12期
孟 楠 王淑红
(太原理工大学电气与动力工程学院,太原 030024)
1 引言
随着电力电子技术、功率半导体技术和高性能的磁性材料制造技术的飞速发展,无刷直流电动机利用电子换向器取代了机械电刷和机械换向器,因此使这种电动机不仅保留了直流电动机的优点,而且又具有交流电动机的结构简单、运行可靠、维护方便等优点,使它一经出现就以极快的速度发展和普及。目前无刷直流电动机已广泛应用在计算机外围设备、办公自动化设备、家电、音像设备、汽车、
电动自行车、数控机床、机器人、医疗设备等方面和领域[1]。
目前国内外对无刷直流电动机的控制系统进行了大量的研究,而这些研究都是针对三相电机展开的,本文要讨论的四相无刷直流电动机,虽然其控制系统略比三相电机控制系统复杂,可四相电机本身能很好的改善无刷直流电动机存在的转矩脉动大的问题,从而研究四相无刷直流电机的控制系统就很有必要,使四相无刷直流电动机具有更广泛的应用范围。
2 四相永磁无刷直流电动机的原理及位置传感器的安装
具有梯形波反电动势的四相无刷直流电动机主电路如图1所示。该电路采用单相导通方式,每个换相时刻只有一个功率管导通,每个功率管导通90°电角度,功率管开通的逻辑顺序为:T1→T3→T2→T4[2]。

图1 系统主电路图
本系统采用的是开关型霍尔位置传感器,位置传感器的基本功能是在电动机的每个电周期内,永磁转子每转过一对磁极(N、S极)的转角,就要产生出与电机逻辑状态相对应的开关状态数,以完成电动机的一个换相全过程。开关型霍尔传感器是一个双值元件,一个双值元件仅有“0”和“1”两种状态,n个双值元件则可组成2n种状态,根据电动机的逻辑状态数确定所需霍尔元件的最少个数[3]。对于四相无刷直流电动机来说,四种逻辑状态就可以完成一个换相过程,所以本系统安装了两个霍尔传感器。
把每个霍尔元件所产生的波形等分成电动机所需要的逻辑状态数,然后把它们相互错开一定的位置角后组合在一起,如果最终能产生所要求的开关状态数,则这个位置角就是可取的。据此本系统的两个位置传感器按空间相隔90°电角度安装。
定子四相绕组反电动势及电流波形如图2所示。

图2 理想反电动势及电流波形
3 系统硬件电路设计
本文介绍的四相无刷直流电动机的开环控制系统硬件结构框图如图3所示。主要有以下五个部分:电机本体、转子位置检测电路、DSP主控部分、驱动电路、四相半桥电路。
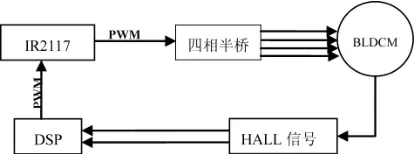
图3 系统硬件结构框图
具体控制过程如下:将两个空间间隔 90°电角度分布的霍尔传感器H1、H2的输出信号经上拉,电平转化和滤波后送至 DSP具有捕捉功能的管脚CAP1、CAP2,向DSP提供转子的位置信号。每一个霍尔传感器都会产生180°电角度的交叠信号,如图4所示。每个输出信号的上升沿和下降沿都被检测,从而产生了4个换相时刻。与EVA模块相关的PWM1-PWM4管脚的输出作为系统功率开关管的换相控制信号,将PWM输出与驱动芯片IR2117直接相连,开启相应的MOSFET,使电机各相绕组不断地换相通电,实现电机四相绕组的自控变频运行。
驱动芯片选用美国国际整流器公司的IR2117,一个IR2117驱动一个功率开关管,芯片内部设计有过电流、过电压保护。使用户可方便的用来保护被驱动的功率MOS管。本文只给出一个MOS管的驱动电路,如图5所示。
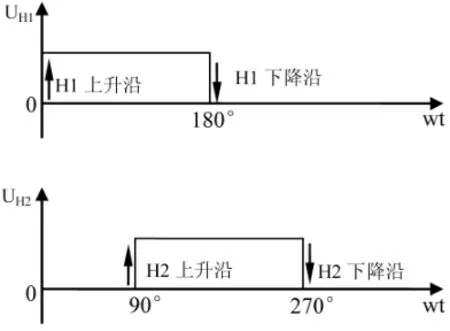
图4 霍尔传感器输出信号
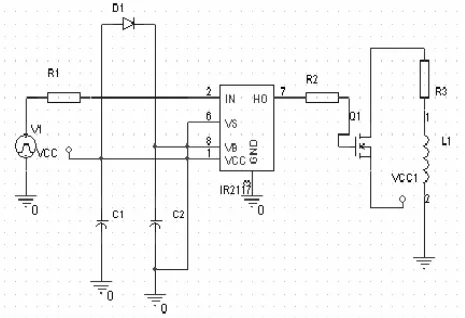
图5 MOS管驱动电路图
4 系统软件设计
无刷直流电动机要正常工作,仅有硬件电路是远远不够的,还需要正确的软件部分配合才能构成一个完整的控制系统,使电机正常运行。
开环控制系统的软件主要由主程序模块和中断服务程序模块组成。其中主程序模块包括DSP初始化、捕获转子初始位置、设置中断逻辑。中断服务程序主要是转子位置信号捕获中断子程序。
系统主程序流程图如图6所示。
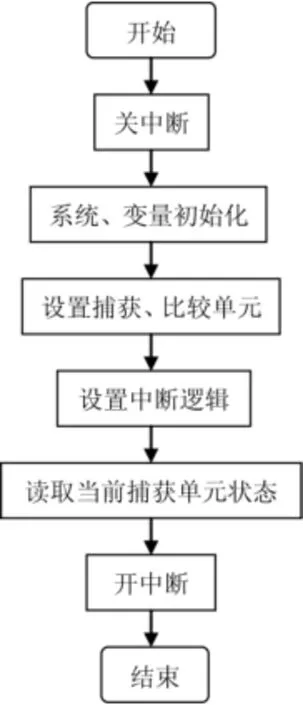
图6 主程序流程图
具体完成的功能由以下几点:①DSP初始化:首先应该关中断,然后对用到的一些寄存器和功能模块进行初始化,包括看门狗、事件管理单元CAP和PWM等,最后再开中断;②捕获当前转子位置:无刷直流电动机由静止不动到正常运转必须经历一个起动过程,电动机起动的时候必须知道其初始位置,否则不能正确确定电流的初始流向,导致电动机起动不起来[4]。所以在主程序初始化完成后应先读取捕获单元状态,为电动机的起动提供最初的转子位置信息。捕获单元状态与开关管控制信号关系如表1所示。
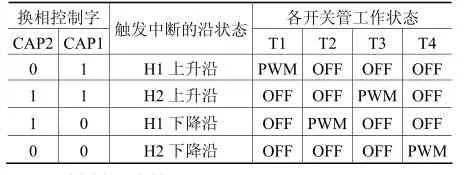
表1 捕获单元状态与开关管控制信号的对应关系
TMS320LF2407A的事件管理器EV是专门为电机控制而设计的专用模块,每个事件管理器都有三个捕捉单元,每个捕捉单元都能产生中断,将CAP1,CAP2这两个管脚设置成捕获上下跳沿的功能,分别捕获霍尔传感器输出的位置信号上下跳沿。电机每旋转 90°电角度,其上下跳沿就会触发一次事件管理器的该路位置信号的捕获中断。整个位置捕获中断程序流程图如图7所示。
5 实验结果
完成系统的硬件电路和软件设计后,进行了硬件电路和软件程序的联调,并对样机进行了实验,下面给出样机调试过程中测得的一些波形图,并做出简要的说明。
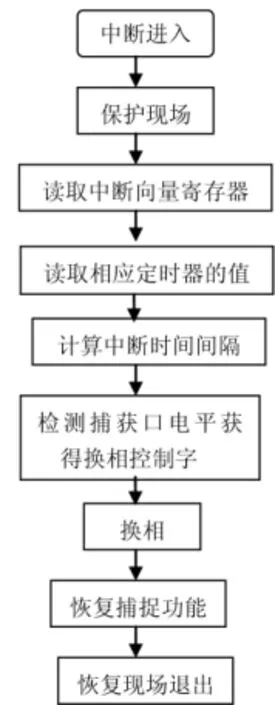
图7 捕获中断流程图
图8所示是霍尔传感器的输出信号。图中两路信号分别是两个霍尔元件的输出信号。
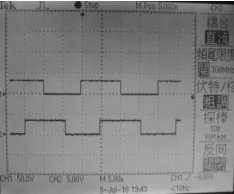
图8 霍尔传感器输出波形
图9是各相绕组的触发信号波形。

图9 各相绕组的触发信号波形
通过实验可以看出,霍尔传感器输出信号正确地反映了转子位置信号;转子每转过90电角度,只有一个功率管导通,为电机相绕组的换相提供了正确换相信号。实践证明采用电机控制专用芯片DSP后,简化了本系统的硬件电路设计,提高了系统可靠性。系统适合于小功率无刷直流电动机的控制,同时,也可推广到其它工业领域,如机床、电梯驱动等。
[1] 王晓明,王玲.电动机的 DSP控制[M].北京:北京航空航天大学出版社,2005.
[2] 王丽梅,王淑红.重叠换相技术在四相无刷直流电动机中的应用研究[J]. 电气技术, 2009(12):45-48.
[3] 杨培双.无刷直流电动机中霍尔传感器的设计与应用[J].机电设备, 2010(3):29-31.
[4] 鲁宗峰. 基于DSP的无刷直流电机控制系统[D].哈尔滨理工大学硕士学位论文,2005.
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
太空探索(2015年6期)2015-07-12
赤峰学院学报·自然科学版(2012年19期)2012-10-14
