
悬停状态下的潜艇攻击方式分析
2010-04-24 05:23汪高武
指挥控制与仿真 2010年3期
管 飞,汪高武,杨 光
(中国船舶重工集团公司江苏自动化研究所,江苏 连云港 222006)
潜艇作为主宰水下战场的主要武器,以其隐蔽攻击的突出优点成为水面舰艇和目标潜艇的主要威胁。潜艇的辐射噪声是被动声纳探测、跟踪的信号,其声源级大小直接影响着被动声纳的作用距离和自身的隐蔽程度。当潜艇的航速增加时,辐射噪声级明显增大。在没有实际测量数据时,潜艇的辐射噪声级随航速的变化关系通常用经验模型来近似,如图1所示。

图1 现有模型对应的噪声变化仿真曲线
从图1中可以看出,当潜艇静止悬停时,潜艇辐射噪声最小,随着航速的增加潜艇的辐射噪声会明显增加,从而使潜艇的隐蔽性降低。
因此,悬停对于潜艇是一种极具战术应用价值的操纵措施,可用于伏击或者规避等动作(配合相应的深度变化),它能有效地降低潜艇的自噪声和辐射噪声,可使本艇先敌发现,先敌攻击。因此,研究潜艇悬停状态下的隐蔽攻击方式将具有重要的战术意义。
1 悬停状态下对目标航向的求解
纯方位目标运动要素解算在求解过程中,本艇必须进行有效机动,否则目标运动要素无解。但是若本艇一直保持匀速直航,则可求解出目标的相对航向,利用相对运动原理,若本艇一直保持悬停,则可求解出目标的绝对航向。
假设潜艇悬停在位置点O上,对目标T分别在t0、t1、t2和tj时刻进行的方位量测分别为B0、B1、B2和Bj,如图2所示。

图2 悬停状态下的敌我态势图
建立量测方程:
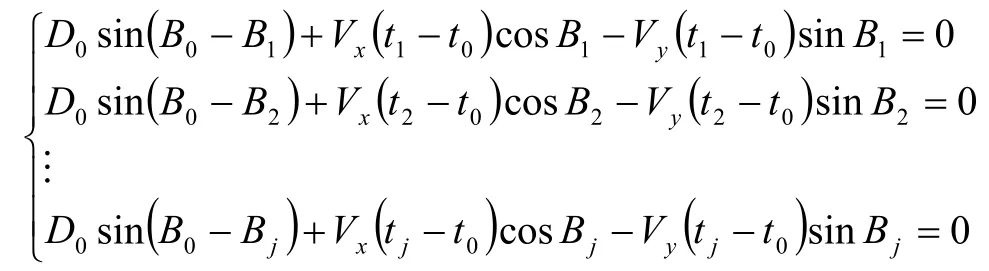
当状态为 (D0,Vx,Vy)时,此系统是不可观测的,而当状态设为时,此系统可观测,从而可以求出目标航向。可以得出,当潜艇悬停时,任意输入目标的距离要素(或速度要素),均可求出目标的航向,而条件则是:目标的方位变化率不为零,即。
虽然潜艇悬停时只能求出目标的航向,但是这对艇长认清当前当前态势有着非常重要的作用。首先,艇长可根据目标航向和方位等信息确定射击阵位,从而进行机动占位;其次,在使用尾流线导鱼雷攻击时,若已知目标的航向,则对鱼雷的入尾流角有着很好的预判作用,从而提高鱼雷的命中概率。
2 占位机动后目标速度与距离的求解
当潜艇悬停时,求出了目标的航向后,潜艇可以进行相应的机动,并在机动后的航行段上对目标的速度和距离进行求解。为了选取合适的目标机动航向,首先对潜艇的目标强度特性进行分析。
潜艇目标强度描述了潜艇对于声波的反射能力。若目标的主动声纳正常开启,则声纳脉冲信号的入射方向和潜艇艇体的夹角会影响回波信号的强度。因此,潜艇机动的航向会直接影响主动声纳脉冲的入射角度和目标的回波强度。表1为某潜艇在不同我舷角时的潜艇目标强度。

表1 某潜艇在不同我舷角时的潜艇目标强度
由表1可以看出,潜艇的目标强度和入射声波的舷角有关,其对应关系呈现出蝴蝶形状(如图3)。

图3 潜艇目标强度沿方位角变化的“蝴蝶形”分布图
因此,潜艇在进行占位机动时,为了能尽量避免被目标发现,潜艇的机动航向应尽量对着目标的主动声纳方位,这样可使在敌方位上本艇的辐射噪声和发射强度比正横方向上降低 10dB以上,使得目标声纳探测距离减小一半左右。而速度则视当前态势情况采取4-8 kn范围均可。
3 仿真计算
1)悬停状态下目标航向的仿真计算
在仿真计算时,声纳、导航均采样间隔为1s,仿真态势取目标初距D0={12,19,29}(km),目标速度Vm={ 10,18,24}(kn),目标舷角Qm={6°,36°,66°},方位误差,导航误差精度指标取:(悬停时只判断目标航向是否收敛)。其仿真计算结果如表2所示。
当无量测误差噪声时,任意给定目标距离或速度,求解的目标航向无误差,从而验证了悬停状态下求解目标航向原理的正确性。当有量测误差时,从仿真结果可以看出,在给定的精度指标条件下,27个态势的航向平均收敛率为 100%,平均收敛时间为4.1min,航向平均收敛精度为 1.9°。对于近距离小舷角态势下,目标航向的求解效果较好,在远距离大舷角态势下,目标航向的求解效果较差。

表2 悬停状态下目标航向的仿真计算结果
2)占位机动后目标速度与距离的仿真计算
仿真态势和方位导航误差特征与悬停时航向求解情况相同,悬停时间为5min,5min后本艇进行机动,机动后本艇速度Vw=8 kn,本艇航向Cw=β0−20°(通过仿真计算,此航向对目标运动要素解算效果比较有利),算法输入所采用的目标航向误差为σC=1.5°。仿真计算结果如表3所示。

表3 占位机动后目标速度与距离的仿真计算结果
从表3可以看出,在给定的精度指标条件下,27个态势的航向平均收敛率为 94.8%,平均收敛时间为8.48min(其中包括了悬停的时间 5min),距离平均收敛精度为5.03%,速度平均收敛精度为1.08kn,只是对于其中部分态势,尤其是远距离小舷角态势的求解效果较差。
4 结束语
本艇悬停时,可以利用目标方位信息对目标的航向进行求解,这将对认清态势和先发制人非常关键。尤其是在使用尾流线导雷攻击时,可经常采用这种悬停攻击方式,因为利用悬停时求解出的目标航向,可以对尾流线导鱼雷的入尾流角有着很好的预判和改进作用,从而提高尾流线导鱼雷的发现目标概率。但若想使用自导鱼雷攻击目标,则需要目标完整的运动要素(航向、速度、距离),这就要求潜艇在悬停时目标航向求解完成后,进行相应的占位机动,(考虑本艇的辐射噪声和解算效果,本艇航向一般比当前方位落后20°,本艇速度可采用4-8kn),并在机动后直航段上利用目标航向和方位信息继续求解目标的距离和速度,从而利用求解出的完整的目标运动要素来控制自导鱼雷的发射,提高鱼雷的命中概率。
[1]刘伯胜,等.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,1989.
[2]陈谷泽,等.潜艇最小噪声操纵方案研究[J].潜艇学术研究,2000(4).
[3]佘远高,等.潜艇水下悬停操纵与战术应用[J].潜艇学术研究,2000.
[4]董志荣.舰艇指控系统的理论基础[M].北京:国防工业出版社,1995.
[5]IEEE Trans Acoustic Speech Signal Processing,Vol36,No.8.Aug.1988:1193-1199.
[6]K.Beeker,“Simple linear theory approach to TMA observability”,IEEE Transaction on Aerospace and Electronies Systems,Vol.AES-29,Apr.1993,575-578.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
社会科学战线(2022年4期)2022-06-15
潍坊学院学报(2021年2期)2021-07-22
新世纪智能(高一语文)(2021年3期)2021-07-16
考试与评价·八年级版(2020年5期)2020-10-29
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国外汇(2019年16期)2019-11-16
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2017年24期)2017-02-02
