针对窄脉冲雷达测角的相位干涉仪仿真研究
2010-04-23 09:27:20郭振耀
指挥控制与仿真 2010年1期
郭振耀,邱 杰
(1.海装西安代表局,陕西 西安 610054;2.海军航空工程学院,山东 烟台 264001)
现代导弹注重隐蔽攻击,特别强调在复杂电磁环境中的反侦察能力,以此提高生存和突防能力,因而以雷达等辐射源为寻的目标的被动寻的制导技术将会发挥越来越重要的作用。
对于对面攻击导弹(如反舰导弹等),雷达目标(以下简称为目标)的方位角是最重要的信息。就单平面被动测角技术而言,相位干涉仪具有精度高、频带宽、原理清晰、技术相对成熟等优点,因此,相位干涉仪成为了对面攻击导弹被动寻的制导技术的重要选择。
相对于一般用途的相位干涉仪,用于导弹被动寻的制导的相位干涉仪有一些特殊性,这主要表现在以下几个方面[1]:
1)作为相位干涉仪探测对象的雷达目标通常以脉冲方式工作,雷达脉冲宽度可以窄至 0.1us量级,相位干涉仪必须有快速、准确获取目标角信息的能力。
2)相位干涉仪天线的空间布局问题。
3)由于弹上空间和承载重量有限,应尽量减少相位干涉仪的硬件,同时充分发挥软件的作用。
4)为保证实时性,应对测向算法进行最大限度的优化。
本文中,将主要针对快速、准确获取窄脉冲目标雷达的角信息的问题进行研究,并用 Matlab/simulink进行定量仿真分析和说明。
1 相位干涉仪基本原理
最简单的单平面(以下均指方位平面)单基线相位干涉仪由两个通道组成,图1所示为其原理方框图。

图1 单平面单基线相位干涉仪原理框图
当来自目标雷达的平面电磁波信号从与天线视轴夹角为θ的方向入射(即入射角为θ)时,天线1、2接收信号的相位差为

式中:λ为信号波长;l为两天线间距,称为基线长度。
如果两个通道的相位响应一致,则接收机 1、2输出信号(以下分别称为基准信号和比较信号)的相位差仍然为φ,经过鉴相器可以取出相位差信息:

式中,K为通道增益。
再进行变换、处理,可以得到:

进一步可得:

相对于图1所示的原理框图,实际的相位干涉仪有很大的不同(如为了解决高的测角精度与大的无模糊测角范围之间的矛盾,采用各种多基线组合方案),但从鉴相器得到各个通道信号的相位差,则是任何相位干涉仪都必须首先解决的共同问题。
2 关于鉴相器的分析[2]
鉴相器可由两路乘法器和低通滤波器组成,如图2所示。
对于脉冲雷达而言,快速、准确地获取其角信息的问题主要发生在鉴相器及其相关部分,其主要原因是基准信号与比较信号在鉴相器中相乘后产生多个新的频率分量,经过低通滤波器后输出的携带相位差信息的脉冲信号不可避免地会有过渡过程,这就产生了如何设计低通滤波器以及在什么时候读取、如何读取相位信息的问题。
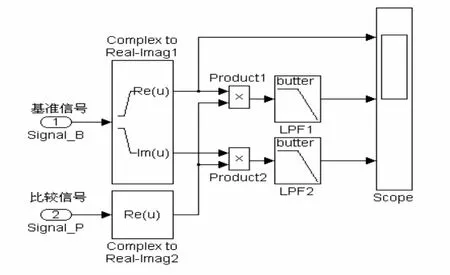
图2 鉴相器的Simulink模型
图2中,分别通过Complex to Real-Imag 1、2模块,复数的基准信号被分解为正交的实部和虚部,复数的比较信号被提取出实部。
基准信号的实部与比较信号的实部相乘后经低通滤波器LPF1模块输出;基准信号的虚部与比较信号的实部相乘后经同样的低通滤波器LPF2模块输出。
理论上,基准信号的实部与比较信号的实部相乘后再经低通滤波将得到相位差的余弦信号,即有:UC=Kcosφ。
基准信号的虚部与比较信号的实部相乘后再经低通滤波将得到相位差的正弦信号,即有:US=Ksinφ。
其类型为巴特沃思;阶数为 10;截止频率为fc=10MHz
由图3可见,UC和US相对于输入有较大的滞后,而且没有稳定段,成为纯起伏波形,因此,无法从中得到(2)式所示相位差信息。
要得到相位差信息,需要对低通滤波器进行合理设计,以保证所产生的UC和US的滞后小,过渡过程短,有足够长的稳定段。对低通滤波器的设计涉及其类型、阶数,等等,关键是截止频率。
在这里,截止频率的设计规则与频谱分析的一般理论(傅立叶级数和傅立叶变换)不尽一致。
理想情况下,UC和US都应是规则的脉冲信号。以UC为例,如果将其看作周期信号则可以表示成为以下的傅立叶级数的形式:
但实际上,由于基准信号和比较信号都是脉冲信号,UC和US也都是脉冲信号。一般而言,其脉冲宽度与基准信号和比较信号的宽度一致,但由于低通滤波器的频带响应有限,UC和US还呈现出振荡。
图3所示是一组设计参数下图2所示鉴相器的波形,其中第一个波形是基准信号的实部(中频),第二、三个波形分别是UC和US。设计参数如下:
• 中频频率:200MHz;
• 基准信号脉冲宽度(比较信号同):0.1us;
• 低通滤波器[3]:

式中,T1为雷达信号的脉冲重复周期,ω1=2π/T1;τ为雷达信号的脉冲宽度;Sa(·)为辛克函数。
按照傅立叶级数的理论,从频谱的角度看,信号的主要能量都集中在第一个零点以内,因此可以将低通滤波器的截止频率fc设置为fc=1/τ,对于τ=0.1us,fc= 1 0MHz。
但显然,如图3所示,将fc设置为10MHz是不可接受的。

图3 一组设计参数下图2所示鉴相器的波形
图4为将fc设置为20MHz和40MHz时的情况。
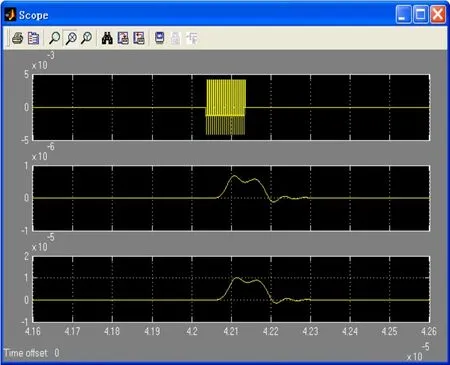
图4afc=2/τ的波形
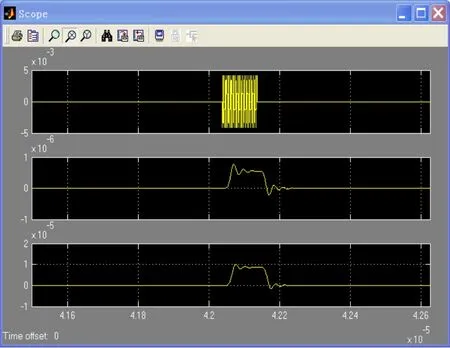
图4bfc=4/τ的波形
由图4可见,fc=2/τ时,输出滞后仍然大,过渡过程长,无稳定段;fc=4/τ时,输出滞后明显减小,过渡过程变短,有短暂稳定段。
通过Simulink仿真和比较可知,当取fc=10/τ时(如图5所示),输出的滞后很小,过渡过程很短,稳定段占了很大的比例。进一步提高截止频率,改善非常有限,已经没有太大的意义了。
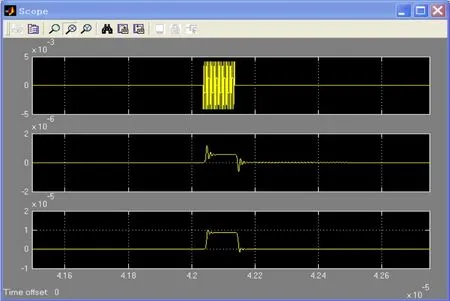
图5fc=10/τ时的波形
由上述分析可以得出以下结论:
1)系统要处理的最窄脉冲宽度(以下简称为最窄脉冲宽度)τ确定后,鉴相器中低通滤波器的截止频率随之而定,应为fc=10/τ。
2)低通滤波器的截止频率确定后,对于接收机的中频提出了限制。显然,接收机的中频fIF必须大于fc,一般应有:

换句话说,最窄脉冲宽度越小,接收机的中频就要越高。例如,对于 0.1us的最窄脉冲宽度,接收机的中频应取在200MHz。
除了截止频率外,低通滤波器的类型和阶数也对输出波形有影响。通过Simulink仿真、比较可知,众多类型的滤波器中,具有最大平坦特性的巴特沃思滤波器效果较好。对于巴特沃思滤波器而言,阶数取8~10为好。
3 读取相位信息的时机和方法
所谓读取相位信息的时机指的是读取上述的低通滤波器的输出信号的时机。显然,被读取相位信息的信号应该具有一定幅度和持续时间,读取时机应该避开低通滤波器输出的过渡过程,选在稳定段。相关电路的Simulink模型如图6所示。

图6 确定读取相位信息时机的 Simulink模
图6中,门限检测部分保证被读取相位信息的信 号具有一定的幅度(由参数Threshold_PD确定);门限检测的输出与其自身延迟(通过Integer Delay模块)后相与(通过LO模块),再触发一个单稳态触发器(自制的SSS Trigger模块)产生一个宽度为最窄脉冲宽度50%的读取脉冲。
显然,延迟相与部分即保证了被处理信号具有一定的持续时间(避免短脉冲干扰),又避开了低通滤波器输出的过渡过程(Integer Delay模块的延迟时间为最窄脉冲宽度的25%)。
理论上,读取相位信息就是进行式(3)所示的计算。这里所说的方法,主要是通过求读取脉冲持续时间内的平均值来避免噪声干扰和信号起伏的影响,以得到稳定、可靠、高精度的相位信息。求均值可以针对CU和SU进行,也可以针对由式(3)得到的φ进行。后者相对于前者可以减少一半的运算量。具体的电路模型在此不拟赘述。
4 结束语
本文以Matlab/simulink为工具,通过仿真、比较,对相位干涉仪快速、准确获取窄脉冲目标雷达的角信息问题进行了研究。研究表明,相位干涉仪快速、准确获取窄脉冲目标雷达角信息的基本能力主要取决于鉴相器中低通滤波器截止频率fc的设计。该截止频率的设计应遵照fc=10/τ的规则,而不是按照频谱分析的一般理论得出的fc=1/τ的规则。另外,还对实际工作中必须要解决的读取相位信息的时机和方法问题进行了研究,给出了切实可行的解决方案。
上述研究成果已经应用于一项科研项目中,为该项目的相关软件和硬件设计提供了清晰而准确的指导,避免了设计上的错误和盲目调试,缩短了相关的设计和研制周期,节约了经费,取得了较好的效果。
[1]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[2]杨万海.雷达系统建模与仿真[M].西安:西安电子科技大学出版社,2007.
[3]薛年喜.Matlab在数字信号处理中的应用[M].北京:清华大学出版社,2003.
猜你喜欢
激光与红外(2023年8期)2023-09-22 09:01:10
成都信息工程大学学报(2022年4期)2022-11-18 07:31:34
无损检测(2022年6期)2022-07-05 08:54:36
数学学习与研究(2020年23期)2020-01-11 08:47:27
重庆理工大学学报(自然科学)(2019年6期)2019-07-16 12:29:40
浙江大学学报(工学版)(2016年4期)2016-12-22 00:37:43
卷宗(2016年8期)2016-11-15 20:56:37
大科技(2016年1期)2016-07-17 02:42:07
电测与仪表(2016年2期)2016-04-12 00:24:48
中小企业管理与科技·下旬刊(2015年4期)2015-04-08 12:49:35