合肥轨道交通1号线GPS控制网建立
2010-04-19 07:00黄北新付先国王林丁锐
城市勘测 2010年4期
黄北新,付先国,王林,丁锐
(合肥市测绘设计研究院,安徽合肥 230061)
合肥轨道交通1号线GPS控制网建立
黄北新∗,付先国,王林,丁锐
(合肥市测绘设计研究院,安徽合肥 230061)
介绍了合肥轨道交通1号线GPS控制网的布设、观测方法、数据处理及成果精度,并就GPS技术在城市轨道控制测量中的应用总结了几点经验。
GPS;轨道交通;控制测量;精度分析
1 工程概况
合肥市轨道交通1号线是合肥市城市综合交通规划的重要一笔,线路呈南北走向,全长约29 km。线路北起合肥火车站,南至滨湖新区珠江路与徽州大道交口西侧,线路沿线穿越胜利路、临泉路、一环北路、长江中路、马鞍山路、芜湖路、一环南路、二环南路、312国道、锦绣大道、紫云路、方兴大道、庐州大道等繁华街区,与规划中的2号~7号轨道线路均有联络线,全程共设地下车站22座,停车场和车辆段各一个。
2 GPS控制网技术设计
2.1 布网原则
轨道交通GPS控制网精度相当于《全球定位系统(GPS)测量规范》GB/T 18314-2009中C级网精度,其主要技术指标符合表1的规定。

卫星定位控制网主要技术指标 表1
本项目GPS控制网根据《城市轨道交通工程测量规范》、《城市测量规范》以及《全球定位系统(GPS)测量规范》中相关技术要求布网。GPS控制网沿轨道线路呈带状分布,采用边连接形式构网,由多个同步大地四边形或三角网组成,网内重合了5个城市二等控制点,由非同步独立观测边构成闭合环或附合路线,每个闭合环或附合路线中的边数不大于6条。为充分考虑合肥轨道交通的总体建设规划、多线路分期建设情况,在1号线与其他线路交汇处,均布设了GPS控制点。
2.2 选点埋石
为便于施工,控制点均沿轨道线路走向布设,大部分控制点选在建筑物楼顶,共选控制点49个,具体选埋时还满足下列要求:
(1)控制点上视野开阔,避开多路径效应影响,点位四周高度角15°以上应无遮挡;
(2)远离无线电发射装置和高压输电线,其间距平均分布不小于200 m;
(3)建筑物楼顶上的点均埋设于承重结构上;
(4)点位便于下一级四等精密导线点的布设;
(5)一般选择在车站或者施工竖井附近;
(6)点位标石便于保护。
2.3 外业观测
本次外业观测采用6台GPS接收机,其中Trimble 5800一台,TOPCON HIPER Pro一台,Leica 12300GG一台,TOPCON HIPER GD三台,其平面标称精度均优于5 mm+1 ppm,所有接收机都在有效鉴定周期内。测前对光学对点器、圆水准器均做了检校。按照规范要求,根据卫星情况、布设的网形和接收机数量,制定作业计划,填写作业进度表,观测尽量安排在每天的最佳时段进行。满足卫星数大于4,PDOP值小于6。仪器严格对中整平。测前测后分别量取天线高,读数至毫米,较差不大于3 mm。观测时按静态相对定位模式进行观测,保证重复设站数≥2,每个观测时段长度≥60 min,卫星高度角≥15°。
全网共联测5个原有城市二等控制点和49个新布设的GPS控制点。由于相邻点位的相对点位中误差精度要求高,所以在控制网观测时,对相邻的短边控制网间保证同步观测。控制网图如图1所示。
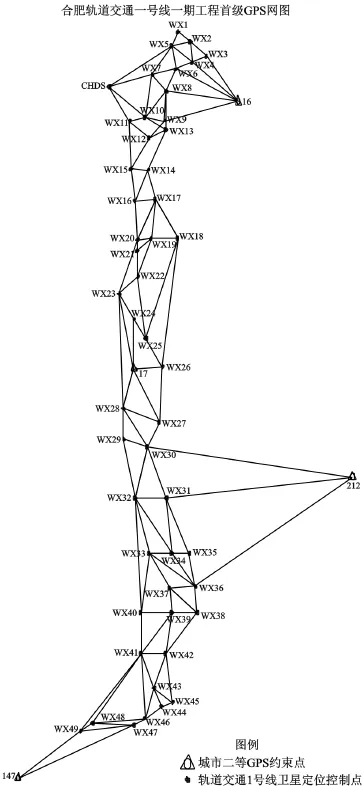
图1 控制网示意图
3 GPS控制网的数据处理
3.1 基线向量的解算
基线向量解算是利用2个或多个测站的GPS同步载波相位观测值确定测站之间坐标差的过程。本项目采用Trimble随机软件TGO 1.63按静态相对定位模式解算,基线解算采用卫星广播星历坐标作为基线解的起算数据。解算前对数据进行预处理,对观测质量不好的数据进行剔除,解算后对不理想的解算成果进行干预,或改变卫星高度角,或对观测值残差比较大的时段进行删除、或选取不同的参考卫星等进行重新解算。全网中最后参与平差的重复基线共计12条,最大基线较差为 2.6 cm(限差为 2.9 cm),最大相对差2.908 ppm,其基线较差统计分析如表2所示。

重复基线较差统计表 表2
全网中由参与平差的基线组成的同步环共有22个,其中坐标分量闭合差最大为 0.38 cm(限差0.40 cm),同步环全长闭合差最大为 0.6 cm(限差0.7 cm),同步环全长闭合差统计分析如表3(由于控制网平均边长为 1 km,边长较短,故未统计相对闭合差)。

同步环闭合差统计表 表3
全网中由参与平差的基线组成的异步环共有57个,其中坐标分量闭合差最大为 2.83 cm(限差14.6 cm),异步环全长闭合差最大为 3.9 cm(限差25.2 cm),异步环全长闭合差统计分析如表4(由于整个控制网平均边长较短,故未统计相对闭合差)。

异步环闭合差统计表 表4
3.2 GPS控制网平差
GPS控制网平差采用原武汉测绘科技大学编制的平差软件PowerAdj 4.0进行整网平差,先进行三维无约束平差,然后进行二维约束平差。
三维无约束平差的目的主要有3个方面:一是进行粗差分析,以发现观测量中的粗差并消除其影响;二是调整观测量的协方差分量因子,使其与实际精度相匹配;三是对整体网的内部精度进行检验和评估。可以通过基线向量3个分量的改正数的大小,最弱点的点位中误差,最弱边的相对精度以及验后单位权中误差来衡量基线解算值质量。三维无约束平差以二等GPS点17的城市现有WGS-84坐标系的三维坐标作为起算数据,在WGS-84坐标系中进行三维无约束平差,并提供WGS-84坐标系的三维坐标、基线向量改正数、点位和边长的精度信息。最弱点WX1的三维点位误差为 1.51 cm,最弱边 WX1—WX2的边长588.168 m,边长相对中误差为 1/101 812。整网中参与平差的独立基线共计131条,所有基线向量的改正数分布情况如表5所示。
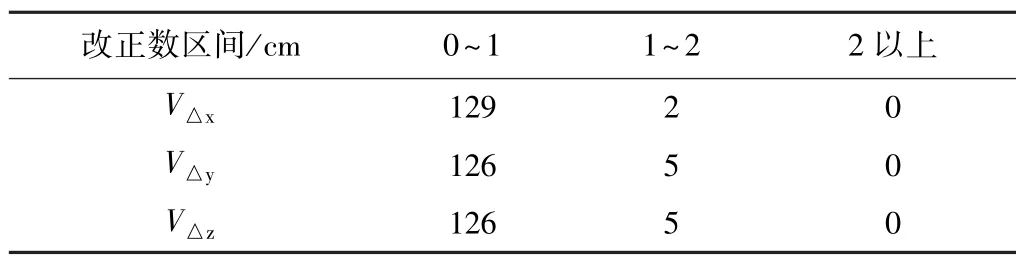
基线向量改正数统计表 表5
从表5可以看出所有基线向量的改正数均小于0.020 m,结合无约束平差结果的精度信息,卫星定位控制网外业观测和基线处理结果很好,整网具有较高的内符合精度。
为使该GPS网纳入到合肥市整个城市控制网系统中,并进行长度基准控制,采用高斯投影在1954北京坐标系中进行二维约束平差,本网联测了5个城市二等GPS控制点,最终选取了兼容性较好的4个点(17,16,212,147)进行二维约束平差,并将另一二等GPS控制点测绘大厦作为重合检核点参与平差。约束平差后,重合检核点测绘大厦与原城市二等成果比较较差为 4.8 cm,满足表 1的要求。平差后最弱边WX1—WX5的边长为509.024 m,其边长相对误差为1/126 192,平均边长相对误差为 1/439 437,最弱点WX22的点位中误差为0.65 cm。
3.3 GPS控制网检核测量
为了检核本控制网的可靠性,对该平面控制网进行了外业检测,采用SOKKIA NET05全站仪,其测角标称精度为0.5″,测距标称精度为0.8 mm+1 ppm,共检测了8条边长,经计算改化到控制网二维约束平差所在的BJ-54参考椭球的高斯投影面上,检测结果如表6所示。
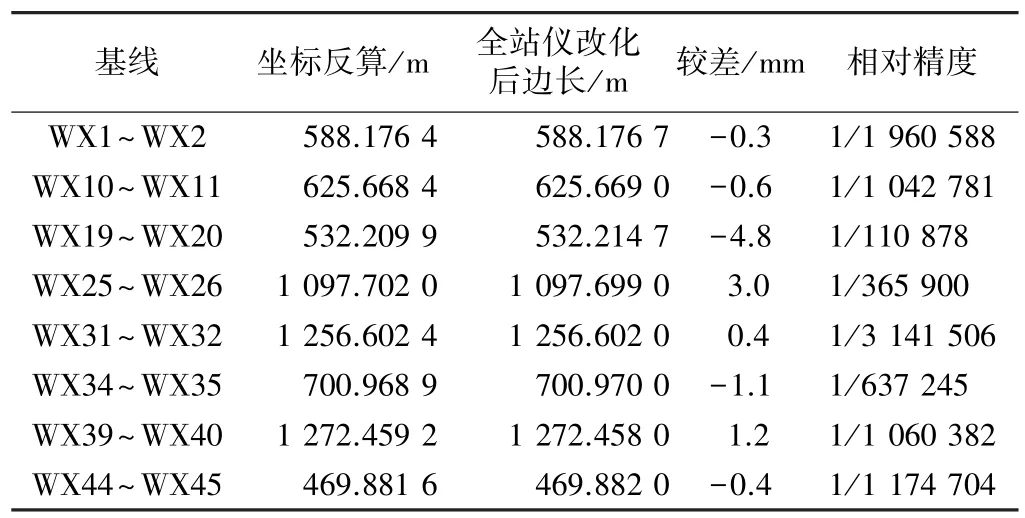
基线检测精度统计表 表6
从两者比较结果可以看出,GPS观测边精度良好,能够满足高精度施工控制网的要求。
4 结 语
合肥轨道交通1号线首级GPS平面控制网,点位选择合理,观测成果可靠,精度满足设计要求,能较好地满足下一级四等精密导线网的观测。通过本次控制网的施测,有如下几点体会:
(1)由于轻轨的选线、建设均位于城市的繁华地段,高楼林立,既要保证GPS点间通视,又要考虑地面精密导线点的布设与通视;既要考虑一号线建设中的控制网复测,又要兼顾与其他规划线路的衔接;既要满足GPS信号接收的要求,又要考虑地铁施工对控制点的影响,所以选点工作相当重要。
(2)选择合理的起算点至关重要,起始数据对控制网成果精度有非常大的影响,约束平差时兼容性不好的起算点会引起GPS网变形,严重损害整网的精度。
[1]GB50308-2008.城市轨道交通工程测量规范[S].
[2]史秀保,袁峥.宁波轨道交通1号线一期工程GPS控制网建立及精度分析[J].城市勘测,2009(4)
[3]王国祥.深圳轨道交通3号线GPS控制网建立与精度分析[J].四川测绘,2006(12)
The Establishment of Line NO.1 HEFEI Rail Transit Project GPS Control Network
Huang BeiXin,Fu XianGuo,Wang Lin,Ding Rui
(HeFei Surveying and Mapping Institute,Hefei 230061,China)
The paper introduces the GPS control network′layout,survey,data processing and accuracy analysis of Line NO.1 HEFEI Rail Transit Project.And summarizes a little of experience about using GPS technology in the urban metro Control Survey.
GPS;Rail Transit;Control Survey;Accuracy Analysis
1672-8262(2010)04-97-03
P228
B
2009—12—08
黄北新(1964—),男,高级工程师,注册测绘师,现主要从事城市测绘技术应用研究。
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
装备制造技术(2021年4期)2021-08-05
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
数学小灵通·3-4年级(2017年12期)2018-01-23
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
测绘科学与工程(2016年4期)2016-04-17
安徽地质(2016年4期)2016-02-27
中学数学杂志(高中版)(2015年3期)2015-05-28