
PLC和变频器在桥式起重机中的应用
2010-04-16 02:38倪振峰
电气传动自动化 2010年6期
倪振峰
(江苏熔盛重工有限公司,江苏 南通 226532)
1 引言
桥式起重机在造船行业中起着举足轻重的作用,传统的桥式起重机采用交流凸轮控制器控制,调速方式为绕线式异步电动机转子串电阻调速,因动作频繁经常会出现控制触点烧坏现象,设备可靠性低。随着新技术和控制设备的发展,PLC和变频器控制系统在桥式起重机中得到广泛运用,用鼠笼电机代替原绕线电机实现变频调速,大大提高了起重机的控制性能和可靠性。
因桥式起重机起升机构是控制系统的重点,本文着重介绍PLC和变频器在起升机构中的应用。
2 桥式起重机起升机构的特点及控制要求
2.1 起升机构特点
桥式起重机起升机构为位能性负载,当起吊重物下降或快速减速运行,电动机处于再生发电制动状态,需将再生能量反馈给电网或用制动电阻进行耗能,其拖动系统属恒转矩性质。
2.2 起升机构控制要求
(1)桥式起重机起升机构要求启动力矩大,运行平稳,且能正反转运行;
(2)起升机构在起吊、停止时必须防止“溜钩”;
起升机构制动器常采用电磁铁制动器和液压推动制动器,当制动器从抱闸到松开或从松开到抱闸需动作时间,但电机转矩输出在通电或断电时是瞬间变化的,因此控制回路需考虑制动器与电动机在动作上严格配合,防止溜钩。
(3)具有超载、限流、高度限位等保护功能。
3 PLC和变频器的配置及应用
3.1 系统配置
(1)系统PLC采用S7-200 CPU 224,扩展模块EM221、EM223。
(2)起升机构变频器采用G7矢量控制型变频器,此系列变频器具有零速全转矩控制功能,能满足起升机构起动力矩大等控制要求,通过变频器参数设置,控制制动器的开 /关顺序,能有效地防止起升机构出现“溜钩”现象。
(3)起升机构电机采用变频电机。变频器的选择要比电动机容量大一个等级,如电动机功率为75kW(YZPF 315M-10),则需选用90kW的变频器(CIMR-G7B4090)。
3.2 起升机构电气原理图
(1)主钩回路电气图
如图1所示为主钩回路部分。制动部分说明如下:如90kW的变频器,可选3只型号为CDBR-4045B的制动单元,每一制动单元接9600W13.6Ω的制动电阻,制动单元要注意主/辅设定(一主二辅)。
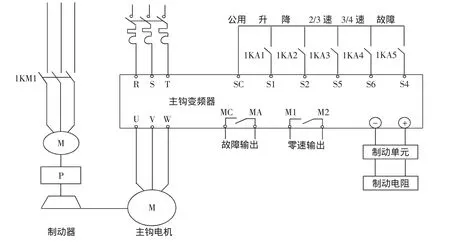
图1 主钩回路
(2)主钩多段速控制回路
如图2所示为主钩多段速的PLC输入输出部分,输入来自主令控制器,用于控制主钩升降四速控制,输出还包括变频器故障复位及制动器控制(图中未给出超载、限位等保护控制点)。

图2 主钩多段速控制
3.3 主钩部分PLC程序及工作过程
(1)主钩部分PLC控制程序
如图3所示为主钩部分PLC控制程序。
(2)对应输入输出信号表
表1所示为对应输入输出信号表。

表1 对应输入输出信号表
由图3可知,当主令控制器在上升位,一档时I0.0接通,Q0.1有输出使1KA1动作,变频器S1有输入,变频器以低段速d1-01设定的频率工作。这里需进一步说明的是:三档时,I0.2与I0.3接通,由梯形图可知,Q0.3、Q0.4有输出,使变频器S5、S6有输入,以d1-04设定的频率工作,四档则以d1-03设定的频率工作。下降时类似。
另外,梯形图中给出了相关的保护。
3.4 变频器参数与制动器动作时序
起升机构变频器控制模式可采用带PG的矢量控制或无PG的矢量1控制方式。
(1)带PG的矢量控制方式
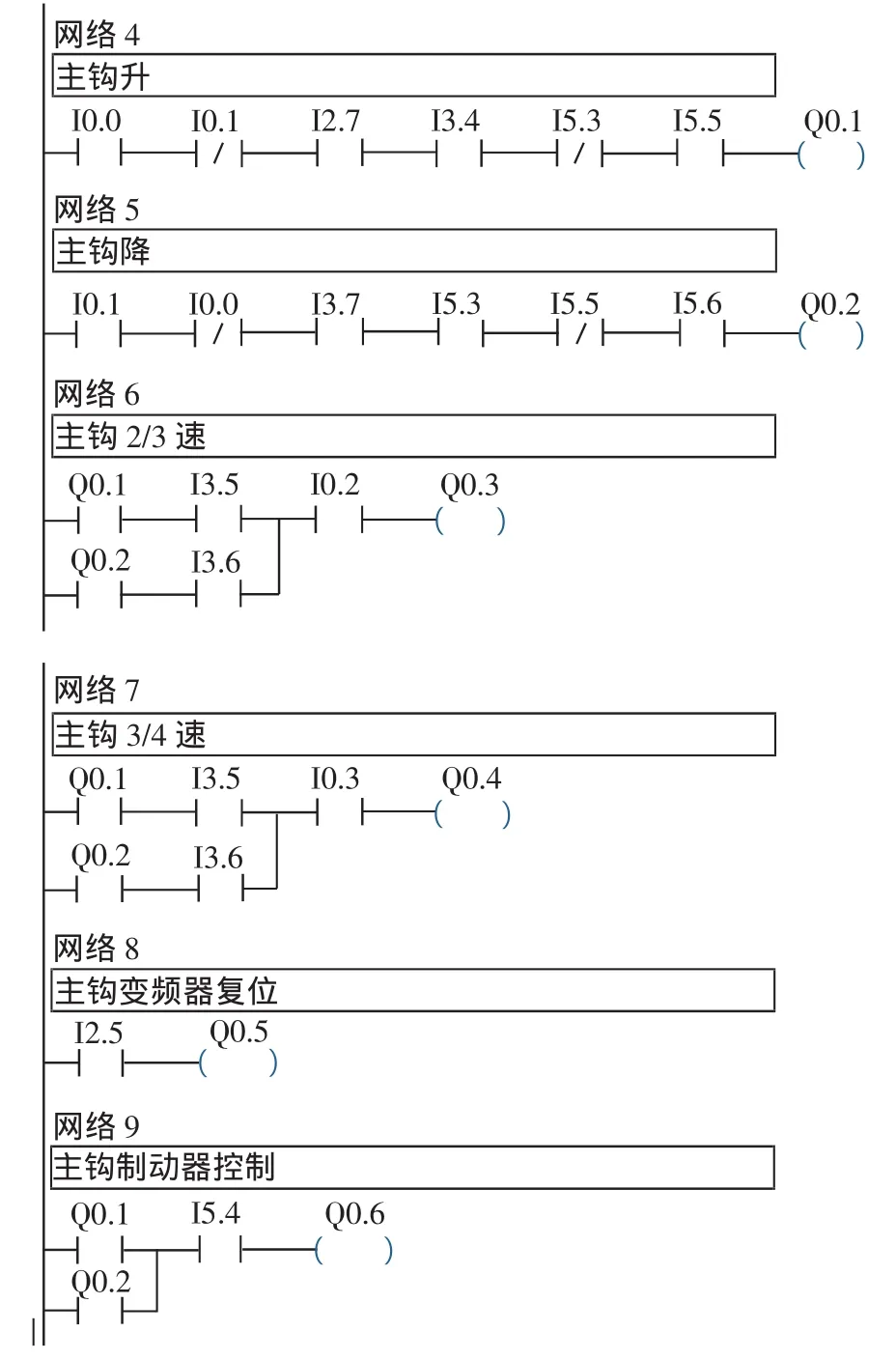
图3 主钩部分PLC程序
带PG的矢量控制在全速度设定范围内转矩波动小,具有零速全转矩功能,保证了电机速度降为零时,能使重物在空中暂停,直到机械制动器抱住电机轴,有效防止了溜钩。
变频器部分主要参数设定如表2所示。

表2 变频器部分主要参数设定(带PG的矢量控制)
电机参数:E1参数根据电机铭牌进行设定,E2参数在电机进行自学习时自动设定。
如图4所示为带PG的矢量控制的制动器开/关时序图。
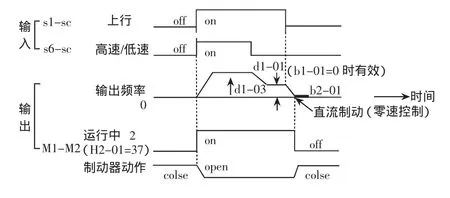
图4 制动器开/关时序图(带PG的矢量控制)
利用变频器多功能接点输出端M1-M2信号送入PLC输入点I5.4(主钩变频器零速),通过PLC程序控制输出点Q0.6,使接触器1KM1动作,从而控制制动器打开。停止时,以b2-01、b2-04设定值进行直流制动,直至制动器抱闸到位,实行零速控制功能。
(2)无PG的矢量1控制方式
无PG的矢量1控制方式控制性能比带PG的矢量控制要差,但无需编码器和变频器PG卡,可用于要求不高的场合,通过变频器控制制动器开/关顺序,合理设定参数,也能有效防止溜钩。
变频器部分主要参数设定如表3所示。
电机参数:E1参数根据电机铭牌进行设定,E2参数在电机进行自学习时自动设定。

表3 变频器部分主要参数设定(无PG的矢量控制)
如图5所示为无PG的矢量1控制的制动器开/关时序图。
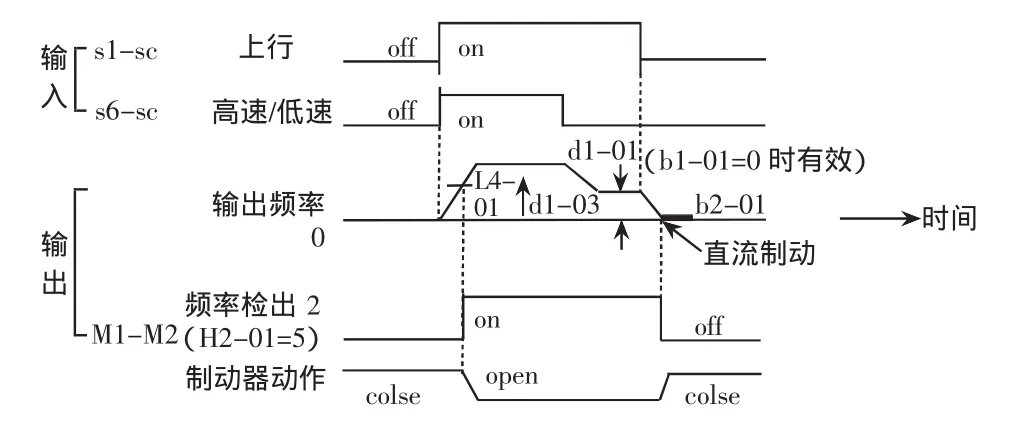
图5 制动器开/关时序图(无PG的矢量1控制)
由图5可知,在变频器输出频率达L4-01设定值时,输出端M1-M2输出信号,控制制动器打开,停止时关闭制动器,并以b2-01、b2-02设定值进行直流制动,防止发生溜钩。
4 控制系统的优点及效果
(1)变频器能实现平滑调速、效率高,吊钩起动、加速、停止平稳快速,调速范围宽,能低速稳定运行,重物落地时负载冲击小,定位精度高。
(2)系统很好解决了电动机起动、停止时的冲击电流,抑制了有害的机械冲击,并对电动机有完善的短路、过载、缺相等保护功能,极大的提高了起重机的可靠性和安全性,延长了其使用寿命。
(3)变频器通过频率检出,多功能接点输出端(M1-M2)作为制动器的开/关信号使用,并与变频器参数配合,有效防止了起升机构溜钩。
(4)变频器采用矢量控制方式,可以将电机定子电流分解成规定的磁场电流和转矩电流,分别进行控制,通过转矩控制,在电机静止状态,能控制它所产生的静止转矩。
(5)PLC和变频器系统控制回路可靠、故障率低、易于维护,大大降低了维修费用。
(6)系统可配置触摸屏或文本显示器对主钩载荷、运行状态、故障情况等进行监控。
5 结束语
本文介绍了桥式起重机起升机构的特点、控制要求、PLC和变频器系统配置及应用实例,并对变频器两种矢量控制方式的制动器动作时序进行了说明,在起重机实践应用中均取得了良好的控制效果。
[1]安川电机.Varispeed G7使用说明书,2009.
[2]姚锡禄.变频器控制技术与应用[M].福建科学技术出版社,2005.
[3]陈伯时.电力拖动自动控制系统[M].机械工业出版社.1994.
猜你喜欢
机电信息(2022年9期)2022-05-07
小猕猴智力画刊(2022年3期)2022-03-28
中学生数理化·高一版(2021年11期)2021-09-05
铁道建筑技术(2020年11期)2020-05-22
中国特种设备安全(2019年3期)2019-04-22
电子制作(2017年13期)2017-12-15
电子制作(2016年15期)2017-01-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
汽车科技(2015年1期)2015-02-28
