
基于中值滤波和参考点的风洞压敏涂料试验图像处理技术
2010-04-15 10:55尚金奎马晓光
实验流体力学 2010年2期
尚金奎 ,马晓光
(中国航空工业空气动力研究院,沈阳 110034)
0 引 言
风洞压敏涂料技术 PSP(Pressure Sensitive Paint)利用光学技术实现风洞模型(试件)表面的压力分布测量,它的基本原理是探针分子(压敏涂料中的活性成份)的氧荧光猝灭效应。它是一种“非介入式”的气动试验技术,不需要对试件进行特别加工,对风洞流场不会产生影响,可以得到高品质的试验数据,并且由于PSP技术采用大面积喷涂的作业方式,所以能够获取整个试件表面的连续压力分布数据。
在航空航天技术发达的美国和俄罗斯(前苏联)等国家,早在上世纪80~90年代,PSP技术就已经取得了突破性进展,并应用于型号风洞测压试验[2-3],在20世纪90年代末和21世纪初进一步发展达到了比较成熟的状态,开始了大规模的生产型应用[4-6]。我国在这方面的研究虽然起步相对较晚,但是经过不断的努力,目前已经初步具备了进行生产型应用的能力[7-8]。
PSP技术获取数据的处理和修正工作直接关系到试验成败和最终精度。国外相关方面的研究开展较早且深入,技术相对成熟[5,6,9]。相对而言,国内数据处理手段和方式较为单一,目前国内主要是通过校准箱获取的校准曲线得到试件表面压力分布。笔者提出了一种试验图像与中值滤波技术相结合的数据处理方法,在不使用校准箱的情况下得到试件表面的压力(Cp值)分布。
1 基本知识
1.1 压敏涂料相关知识
压敏涂料是PSP技术中的核心部分,由活性层和基层组成,其中的活性层是由发光体(荧光探针分子)和基质构成,基质除了能固定发光体外,要求具有较高的气体透过性,对荧光探针分子的光吸收和发射无干扰,在较宽温度范围内能够弹性回复以及优良的成膜性[7]。氧荧光猝灭效应就发生在活性层中。
氧荧光猝灭效应的强弱与环境中的氧分子浓度,探针分子激发态的本征寿命以及激发态猝灭速率有关,通常可以用Stern-Volmer公式表述压敏涂料氧荧光猝灭效应的影响和氧分子浓度的关系[8]:

式中,I0和I分别表示无氧环境下和在氧浓度为[O2]环境下压敏涂料的发光强度;kq表示双分子碰撞猝灭速率常数;τ0表示激发态的本征寿命;[O2]表示猝灭剂氧分子的浓度。
在风洞试验中,要得到I0既不现实,也不可能,因此引入参照光强 Iref,Iref不受氧猝灭的影响,同时氧气浓度与压力有正比关系,所以通常在风洞试验中采用Stern-Volmer公式的另一种形式[10]

其中,Iref、Pref,表示在选定参照条件的温度下,压敏涂料的参照光强和参考压力;A(T)和B(T),通常称为Stern-Volmer系数。
在不考虑温度影响,且采用压力系数Cp=2(pp∞)/p∞的情况下,公式(2)可以写成如下形式 ,
1.2 图像中值滤波
一幅图像的灰度值或亮度值可以看作一个二维函数f(x,y)[11],x,y分别表示图像平面的横坐标和纵坐标。一般情况下,信号在图像中属于低频成份,噪声在图像中属于高频成份,所以可以利用它们之间特性的差异对图像进行适当处理,消除或减少图像中的噪声。
减少图像噪声的方法在空间域中又称为图像的平滑空间滤波,图像中值滤波就是其中的一种,它是典型的非线性低通滤波器。顾名思义,所谓图像中值滤波就是将图像中各点的值用其邻域的中值代替,即,若用矩阵[xij]表示一幅数字化的图像(i,j表示图像像素坐标),W[xij]表示对图像[xij]中的点 xij做窗口操作,med(W[xij])表示对窗口内的所有点取中值,用[yij]表示经中值滤波后的图像,那么[12]

由于图像中值滤波能够有效的去除图像中的噪声,并且能够克服线性滤波对图像造成的模糊,所以得到了广泛的应用。
2 试验图像的处理
试验采用的试件是半翼展机翼模型,试验马赫数为0.8,迎角为12°,试验采用的CCD相机分辨率为512×512,12位灰度等级。
在半翼展试件上表面共9行测压孔,可以通过常规测压技术获得测压孔当地的Cp值,其中靠近翼根的为第一行,共10个测压孔,其余测压孔个数沿翼展方向依次为 9、8 、8、7 、6、6、5、3,靠近前缘的测压孔为每行测压孔中的第一个,靠近后缘的为最后一个。试件表面除测压孔外,还有标志点,标志点在进行多幅图像配准时使用。试件原始光强比图像和MATLAB中值滤波后的图像如图1、2所示。
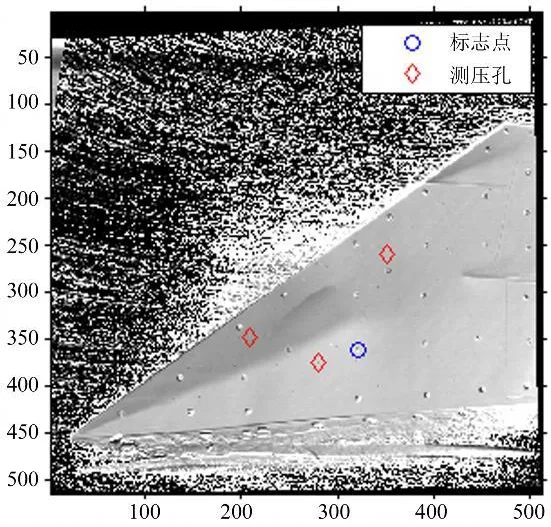
图1 半翼展原光强比灰度图像Fig.1 Original light intensity ratio image
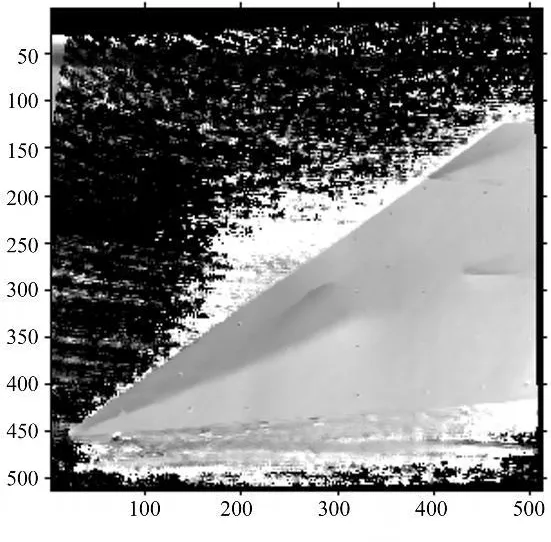
图2 滤波后的光强比图像Fig.2 Filtered light intensity ratio image
在图1中,试验获得的光强比图像中存在测压孔(如图中以红色菱形框框定的位置)和标志点(如图中以蓝色圆形圈定的位置),这两种位置点在参考图像和试验图像中均应表现为黑色(像素灰度值为0,即没有荧光产生),但由于干扰和噪声的存在,在表现为光强比(试验图像和参考图像光强之比)的图1中测压孔和标志点处本身像素灰度值波动很大,与其邻域灰度值差别也很大,这与其周围信号像素灰度值变化比较平缓的特点形成了鲜明的对比。并且由于测压孔占用像素较少,距离测压孔1~2个像素的点其灰度与周围像素有较大差异,但距离为2~3个像素的地方,其邻域像素受到的干扰较小,所以能够将其看作图像噪声,从而可以应用图像滤波的方法将测压孔所呈现的噪声在图像上滤除,恢复测压孔处的光强比数据。
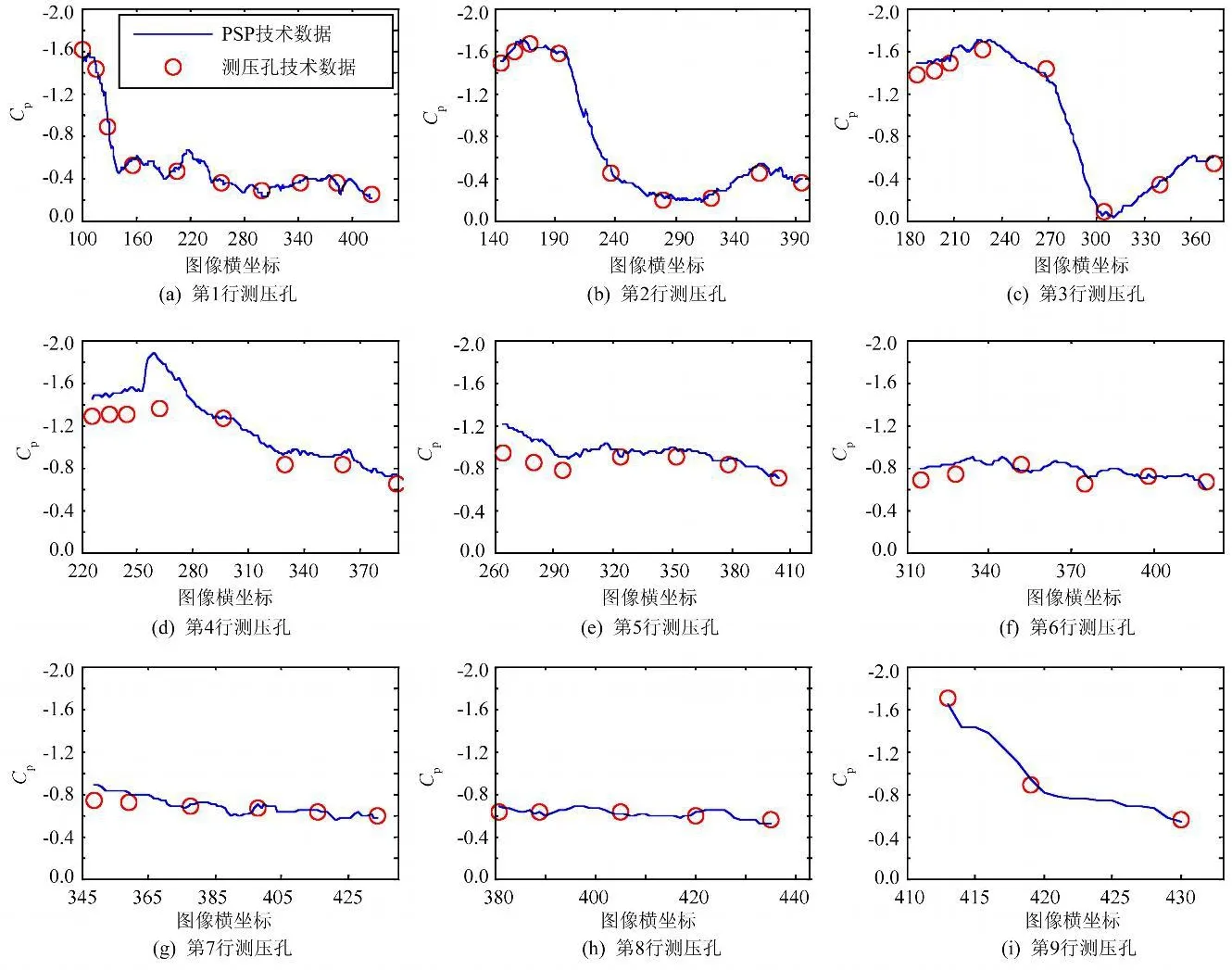
图3 图像横坐标x-Cp值关系曲线图Fig.3 x-Cprelational graphs
为了得到PSP图像中测压孔处的光强比数据,结合测压孔处像素灰度值的变化特点,采用的滤波器为5×5的空心中值滤波器。为了尽量获得最接近真实的数据,在计算式(3)中系数m和n时,应该小心的选取参考点,可以根据试件的空气动力学特性知识以及风洞试验的经验积累在风洞试验前事先确定,也可以在试验完成后通过分析PSP光强比图像确定。本文选取的参考点是图1中由菱形框框定的3个测压孔。
滤波后的光强比图像见图2,从图2中可以看到空心中值滤波很好地去除了测压孔处的"噪声",对标志点处灰度值也有一定的"恢复"作用,并且试件边缘及其构件边缘以及光强比数据发生较大变化形成的边界被较好地保留了下来。
3 试验结果与分析
以图1中所示的3个测压孔为参考点,结合滤波后得到的参考点光强比数据和常规测压技术实测Cp值,采用直线拟合方式得到的直线为

其中,m=6.1449,n=-5.2604。公式(5)就是光强比与Cp值关系曲线。
为了更加清晰的表示PSP试验方法和常规测压方法所得的Cp值之间的关系,下面列出了Cp值与图像横坐标曲线关系图,见图3。图中PSP技术数据曲线是一行测压孔中相邻测压孔之间连线所在位置的PSP Cp值与其所在位置横坐标x形成的曲线。
图3中,第1、2和3行测压孔处PSP方法获得的Cp值形成的曲线在测压孔处与常规测压方法所获得的测压孔处Cp值吻合较好。第4、5行测压孔处,PSP方法获得的Cp值在机翼前缘与常规测压方法所获得的数据相比明显偏小,其中第4行第4个测压孔附近PSP方法获得的数据形成的曲线突然向上突起,与常规测压方法获得的Cp值形成较大的差值,在第5个测压孔处两种方法获得的Cp值又很好的吻合,这个突起的存在不符合空气动力学常识,从原始光强比图像来看(图1),此处,局部图像灰度突然变小,形成了一个像素灰度相对不连续区,由此可以推断这一区域的原始光强比数据存在错误,而造成数据错误的原因可能是多方面的,比如压敏涂料喷涂后的局部污染、局部区域压敏涂料喷涂质量较差以及不恰当的压敏涂料喷涂后处理等。第6、7、8和9行测压孔处,虽然在第6、7行测压孔机翼前缘位置两种方法的偏差相对于其后的其他位置较大,但整体来说这4行测压孔处PSP数据与常规测压方法测得的Cp值吻合较好。
从以上的分析中可以看出,除去个别错误的数据和局部的机翼前缘外,该方法处理所得的PSP数据与常规测压方法能够较好的吻合。至于局部机翼前缘位置偏离较大的原因则仍需要进行进一步的研究,采用校准箱校准曲线的方法获得的PSP数据同样存在这样的问题。
4 结论与展望
目前,国内通常采用校准箱校准曲线的方法得到试件压力数据。笔者提出的方法结合传统测压孔得到的压力数据和图像中值滤波技术获得试件表面的压力分布,加入了风洞试验中试件自身因素对试验结果的影响,可以在一定程度上弥补校准箱方法的缺陷,提高试验精度,具有较大的发展潜力和应用前景。
相对拥有先进航空技术的欧美等国家而言,PSP技术在我国发展还不够成熟,存在大量有待解决的问题,需要进行更加深入的研究,但是PSP技术由于不需要对试件进行特别的加工,而且能够获得试件表面的压力场数据,具有天然的优势,是风洞试验技术的发展方向之一,只有真正的掌握它才能适应未来飞行器设计的需要,为未来飞行器的设计提供有力的支持。
[1]ENGLER R H,K LEIN C.360°PSP measurements in transonic flow[C].Proceedings of the 19th International Congress on Instrumentation in Aerospace Simulation Facilities,149-158,2001.
[2]MCLACHLAN B G,BELL J H.Pressure-sensitive paint in aerodynamic testing[J].Experimental Thermal and Fluid Science,10(4):470-485,1995.
[3]BOROVOY V,BYKOV A,MOSHAROV V,et al.Pressure sensitive paint application in shock wind tunnel[C].International Congress on Instrumentation in Aerospace Simulation Facilities,'95 Record,34.1-34.4,1995.
[4]BELL J H,BURNER A W.Data fusion in wind tunnel testing;Combined pressure paint and model deformation measurements[C].20th Advanced Measurement and Ground Testing Technology Conference,AIAA-98-2500,1998.
[5]ERICKSON G E,GONZALEZ H A.Pressure-sensitive paint investigation of double-delta wing vortex flow manipulation[C].43rd AIAA Aerospace Sciences Meeting&Exhibit.AIAA 2005-1059,,2005.
[6]LIU Tian-shu,GUILLE M,SULLIVAN J P.Accuracy of pressure sensitive paint[J].AIAA Journal,39(1),2001.
[7]程厚梅,张永存,陈柳生.光学涂层测压技术[M].空气动力学前沿研究,北京:中国宇航出版社,108-115,2003.
[8]张永存.在高速风洞中使用荧光压力传感器技术对飞机模型压力场的试验研究[J].流体力学试验与测量,2000,14(2):21-25.
[9]KAMMEYER M,DONOVAN J,KELBLE C,et al.Accuracy assessment of a pressure-sensitive paint measurement system[C].40th Aerospace Sciences Meeting&Exhibit,AIAA 2002-0530,2002.
[10]WATKINS A N,JORDAN J D,LEIGHT Y B D,et al.Development of next generation lifetime PSP imaging systems[C].Proceedings of the 20th International Congress on Instrumentation in Aerospace Simulation Facilities,2003.
[11]GONZALEZ R C,WOODS R E,EDDINS S L.数字图像处理(MATLAB版)[M].北京:电子工业出版社,2005.
[12]邢藏菊,王守觉,邓浩江等.一种基于极值中值的新型滤波算法[J].中国图象图形学报,6(A):533-536,2001.
猜你喜欢
奇妙博物馆(2022年9期)2022-09-28
北京航空航天大学学报(2022年6期)2022-07-02
健康护理(2022年5期)2022-05-26
中学生数理化·八年级物理人教版(2021年4期)2021-07-22
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
建材发展导向(2019年5期)2019-09-09
中华胃食管反流病电子杂志(2016年2期)2016-10-10
中华胃食管反流病电子杂志(2016年2期)2016-10-10
风能(2016年12期)2016-02-25
