
多智能体协作动态路况信息服务系统研究*
2010-04-12 08:02张健钦徐志洁王晏民
武汉理工大学学报(交通科学与工程版) 2010年4期
张健钦 陆 锋 徐志洁 王晏民
(中国科学院地理科学与资源研究所资源与环境信息系统国家重点实验室1) 北京 100101)
(北京建筑工程学院测绘与城市空间信息学院2) 北京 100044) (北京建筑工程学院理学院3) 北京 100044)
交通信息服务系统中的动态交通信息服务系统主要分为多源数据集成、交通流综合处理、交通信息发布服务三个阶段,如图1所示.多源数据集成处于整个系统的前端,不仅可以接收来自多个调度中心的浮动车数据,同时可以接收磁感线圈、交通事件播报等不同类型的交通数据,从多维角度计算道路交通路况信息,实现多种类型数据的优势互补.在交通流综合处理阶段系统将高效处理融合多源交通数据,经过交通信息的预测填补,最终生成描述城市道路交通路况的数据信息,并由交通信息发布服务通过互联网、移动通信网络(如GPRS,3G)、调频副载波(RDS)广播和数字广播(DAB,CMMB)等通信方式,向公众提供实时路况信息服务.
目前的实时路况信息播报方式受众面广,如果大部分信息接收者都按照所收到的路况信息制定或调整行车路线,则对全局交通系统扰动较大,在避开现有交通拥堵点的同时容易造成新的拥堵点,使路网各路幅的交通流处于难以预测状态,同时使得路况信息发布失去意义.本文提出一种多智能体协作动态路况信息服务系统,探索自主导航和中心式导航相结合的动态导航方法,通过智能体之间的协作,在不严重违背驾驶车辆出行者对出行方式、路线、出发和到达时间要求的前提下(自主导航),能够对路网交通流量在时间和空间进行预测、合理分配和诱导管理,提供实时性更强的更贴近实际状况的诱导路径(中心导航).

图1 动态路况信息服务系统
1 Agent和多Agent系统
Agent理论起源于分布式人工智能(distributed artificial intelligence,DAI),Agent理论与技术还推动了很多其他学科的发展,如经济学、地理科学、生物学等.Agent的定义尚没有形成一个完全一致的意见,但大都认为一段程序或者一个实体具有以下特性就可以称为Agent:(1)主动性,能根据自身要达到的状态目标而主动地行动;(2)自治性,能根据自身要达到的状态目标,调节增强达到这个目的的自身能力;(3)反应性,对外界的激励作出反应的能力;(4)协作性,亦称社会性,即具有与其他Agent进行合作的能力.
多Agent系统是基于Agent的分布式人工智能应用系统.在实际应用的多Agent系统中将各种具有不同能力的Agent结合起来,通过它们之间的通信、合作、互解、协调、调度、管理与控制来表达系统的结构、功能及行为特征.Agent是协作系统中的独立行为实体,它能够根据内部知识和外部激励决定和控制自己的行为,而且还可以与其他Agent有效协同工作.各智能体通过相互协调、相互协作可解决较大规模的复杂问题,从而克服建立一个庞大知识库所造成的知识管理和扩展的困难,使系统具有很强的鲁棒性、可靠性和自组织能力.多Agent技术在很多领域都已经得到应用,包括交通管理系统、决策支持系统、信息协作系统等等.在已有的应用智能体建模交通管理系统的研究工作中,集中在研究具有更加灵活和鲁棒性的交通管理系统的理论方法,将明显改善交通事故的发现和响应机制、交通信号的协作控制机制,以及动态路况信息的分发机制[1-2].但是关于如何在时间和空间上进行有效的车辆诱导的研究不多.本文提出的多智能体协作动态路况信息服务系统的目标是通过向行进中的车辆智能体发送有效的动态路况信息进行诱导,克服局部路网容量的不足,在改善全局路网交通容量的同时满足个体出行者的需求.
2 交通网络多Agent系统设计
2.1 系统结构和Agent模型
系统的框架如图2所示:将路网中运行的车辆建模为自主智能体,它是对装备智能导航设备车辆抽象的智能代理,每一个智能体均能控制自己的行为并对动态路况信息做出适当的决策及反应,车辆行驶行为的控制逻辑(自适应导航控制逻辑)集成在每个车辆的内部,因此,不同的车辆可以有不同的行驶模型;当有新的车辆行驶模型时,可以很方便地更换模型,以测试新的模型是否有效.将车辆行驶所在的路幅段(roadway section)建模为路幅段智能体,它是对路网数据模型中路幅段抽象的智能代理(实体表现是两个相邻的连通性节点之间存在的一条有向通路,可包含多个路段),车辆智能体与其所在的路幅段智能体通信,将其位置信息上报给其所处的路幅段智能体;同时道路网中发生的突发事件(如交通事故、道路积水)、临时交通管制、占掘路事件等信息也匹配至对应的路幅段智能体.因为同一时间内在同一路幅段上的车辆和事件数有限,所以通信的强度和需要的数据量也是有限的,可以满足实时性要求,还可以在将来方便地扩展为并行处理的系统[3-6].将交通系统的信息分散存储在各个车辆、路幅段智能体中,各个智能体只能表达路网中某一局部的信息,无法掌握整个路网的全局状态,也就无法根据实时路况实现最优路径寻找、实时诱导等需要全局信息的应用.因而系统中还建立了一个全局性的路网智能体,它是对路网数据模型中全局路网抽象的智能代理(实体表现是全局的道路网),通过广播模型与路幅段智能体通信和车辆智能体通信,实现收集动态路况信息,下发诱导信息等.
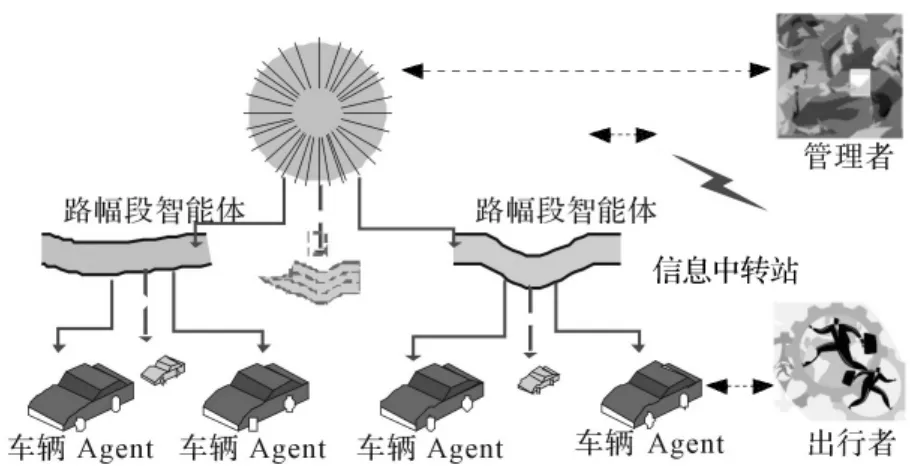
图2 多智能体协作概念图
本系统是路网智能体(对应现实中的路网管理者),路幅段智能体(对应现实中的信息中转站)和车辆智能体(对应现实中的出行者)之间协作的多智能体系统(参见图2).系统中的多智能体功能表见表1,属性参见图3.路网智能体负责记录所有被诱导车辆的动态路径,接受路幅段智能体上报的信息并进行路况的预测,路网管理者可以调整路网智能体中路况预测的规则;路幅段智能体负责记录所有被诱导车辆的动态位置,检测本路幅段的突发事件(如交通事故、道路积水)、临时交通管制、占掘路事件等信息,并及时上报给路网智能体;车辆智能体负责自适应的出行前路径规划和出行中的动态路径规划调整,同时实时上报车辆的动态位置.
2.2 多层路网数据模型
路网数据结构是道路空间数据和属性数据在数据库中的组织形式.本文提出的路网数据结构是在处理浮动车数据基础上,能够匹配突发事件、临时交通管制、施工占道事件等信息的数据结构,是对导航数据模型中间交换格式的业务定制.其中节点(node)包含道路平面交叉口、道路起终点和出入口、道路等级改变的位置点.路幅段(roadway section)表示两个相邻节点之间的一条有向通路.路幅段单元表示路幅段中两个相邻坐标点(vertex)之间的直线线段.如图4的路幅段1包含了4条路幅段单元.
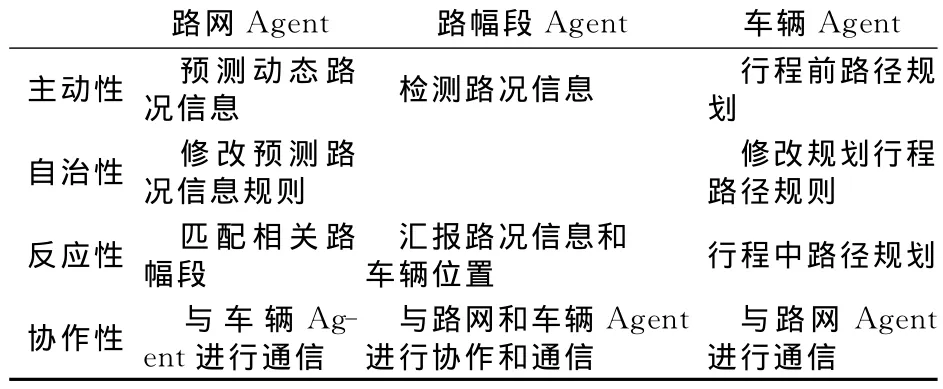
表1 交通网络Agent功能表

图3 路网空间数据结构和对应智能体属性
道路网结构可以用图的形式来表示.图5所示的交叉路口涉及8条路幅段.按照相邻路幅段之间的连通性,路幅段前行方向的路幅段称为此路幅段的后继路幅段,可顺行到此路幅段的路幅段称为此路幅段的前继路幅段.图5中路幅段1的后续路幅段为路幅段4,5和7;路幅段7的前继路幅段为路幅段1,3和6.
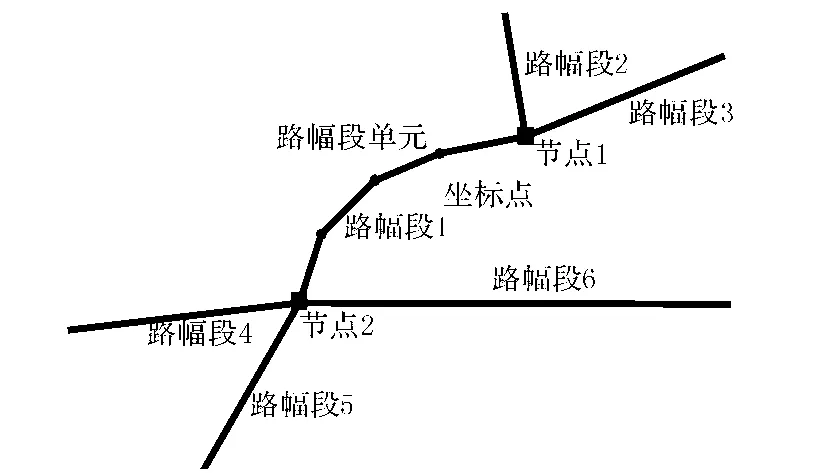
图4 路网空间关系示意图
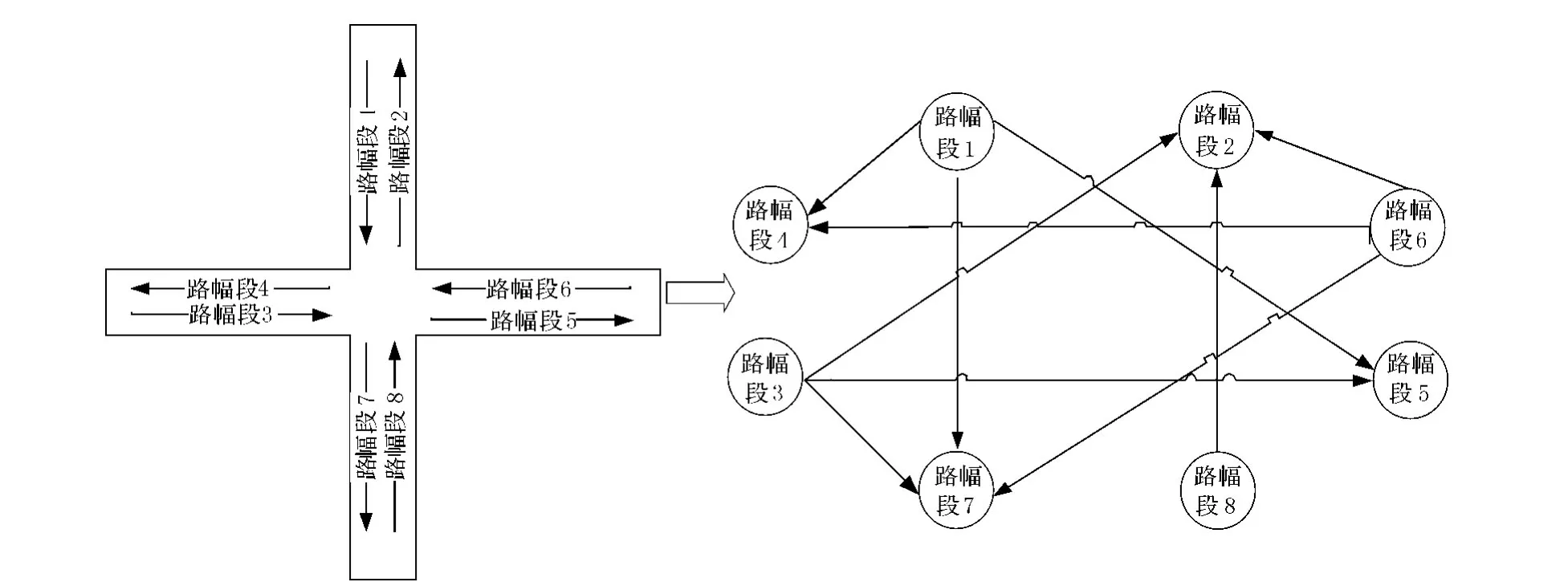
图5 路网拓扑图
2.3 系统中多Agent协作模型
由于路幅段或路幅段单元保存了历史路况信息,可以建立各种推理模型得出该路幅段在某一时刻规律性的路况信息.路幅段智能体接受车辆智能体的位置信息后计算出车行速度,并结合突发事件、临时交通管制、占掘路事件等信息,可以判断出该路幅段是否在某一时刻交通压力过大、是否拥堵等,并将这些信息发送给路网智能体.这样,当路网中所有的路幅段智能体将路况信息发给路网智能体后,路网智能体就能获得全局路网的信息.然后,路网智能体利用这些信息进行实时路径规划,再将动态路由表发送给车辆智能体,由此实现动态诱导和路径寻优.
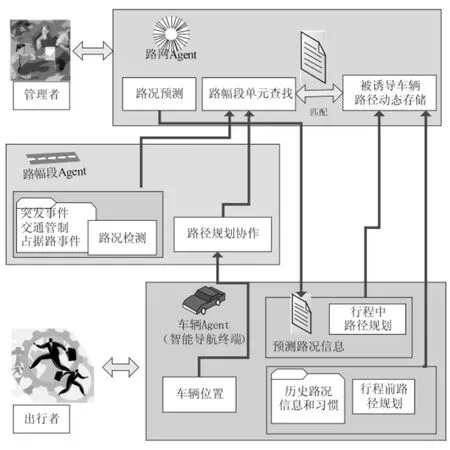
图6 多智能体协作动态路况信息服务系统总体流程图
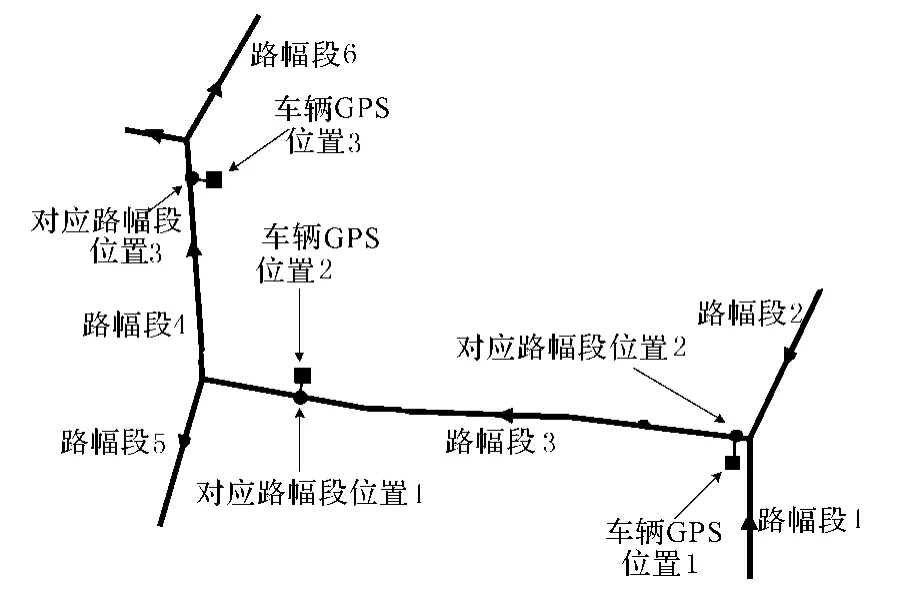
图7 车辆智能体行进过程示意图
多智能体协作的基本流程如图6所示,车辆智能体在出发前依据实时交通信息和历史交通信息进行行程前路径规划,同时向路网智能体上传规划的出行路径,并开始向其所在的路幅段智能体报告当前所处的位置(如图7中位置1);路幅段智能体负责检测并记录进入本路幅段的车辆智能体,同时向路网智能体报告即将离开本路幅段(如图7中位置2)的车辆智能体,起到路径规划协作的作用.路幅段智能体同时还负责检测本路幅段的突发事件(如交通事故、道路积水)、临时交通管制、占掘路事件等信息,并及时上报给路网智能体.路网智能体汇总所有路幅段智能体报告的突发动态路况信息,同时查找车辆智能体的出行路径中是否包含发生突发路况信息的路幅段或者其前继路幅段(一般是两层),然后根据交通事件发生导致交通流变化的交通流模型确定路幅段中路况权值变化情况,并告知相关的车辆智能体.相关车辆智能体在进入下一个路幅段之前(如图7中位置2或3),根据最新的路网预测路况修改最优路径(行程中出行路径的规划).车辆智能体每次离开所在路幅段之前都与路网智能体通信,查询是否需要行程中出行路径的再规划.在上述流程中比较重要的任务是车辆智能体与路网智能体的协作.图8中描述了两种从路网智能体向车辆智能体传送动态路况信息的过程.一种过程是车辆智能体定期向路网智能体请求并下载基于历史经验的路况规律性信息.另一种过程是路网智能体不断向需要行程中路径再规划的车辆智能体推送变化了的预测路况信息.
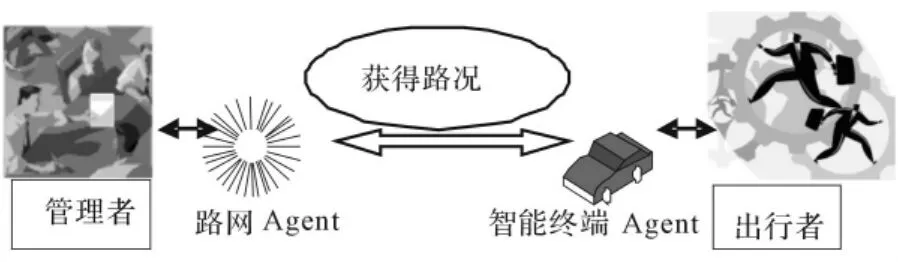
图8 车辆智能体与路网智能体协作的任务实例图
2.4 原型系统开发
为了验证上述技术流程的可行性和有效性,根据上述系统结构、Agent模型、路网数据模型和多Agent协作模型,本文基于Swarm平台和Java语言对上述模型进行编程,开发原型实验系统,便于对智能体模型规则和属性的验证和修改.Swarm是由美国圣塔菲(Santa Fe)研究所基于复杂适应系统理论开发的多智能体软件工具集.它采用多智能体模拟的方法对复杂适应系统进行模拟仿真[7].Swarm的核心是一个面向对象的框架,用以定义在仿真中互相作用的智能体和其它对象的行为.由于Swarm没有对模型和模型要素之间的交互作任何约束,可以对复杂系统进行较好的模拟.目前原型系统初步实现了动态路况模拟和车辆智能体在动态路况信息影响下的决策运行过程,系统开发正在进一步完善中.
3 结 束 语
路况信息对于驾驶车辆出行者非常重要,动态路况信息的采集、传输和发布的技术路线已经相对成熟,但是利用水平相对较低,如何结合时空一体化的GIS-T数据模型提供个性化的出行诱导和动态导航服务仍是研究的难点和热点.本文基于GIS-T的数据模型和多智能体的理论方法研究建立一种多智能体协作动态路况信息服务系统.研究的重点在于通过增强信息提供者和出行者之间的交互和协作获得更优的出行规划和行驶路径,同时有助于丰富完善时空一体化GIS-T数据模型中的移动对象的建模与查询方法.在此基础上本文基于Swarm平台和Java语言设计开发了实验原型系统.后续的研究和开发工作主要包括以下几方面:(1)进一步完善原型模拟实验系统;(2)研究在路网中接受动态路况信息的车辆智能体占路网中车辆总数不同比例的情况下对于整个交通系统全局造成的不同影响;(3)目前,“智能车辆系统”的研发使得车辆嵌入了自适应辅助驾驶系统,基于智能体的方法学习驾驶员的出行习惯并提供优选路径,这些工作为本文的研究奠定了更深的基础,文章将研究引入竞争性谈判机制的多智能体协作模型,这也是后续研究工作的重点.
[1]林志勇.基于多智能主体的动态导航模型研究[J].测绘科学,2007,32(4):93-95.
[2]Cetin N,Nagel K.Large-scale multi-agent transportation simulations[J].Computer Physics Communications,2002,147:559-564.
[3]孟宪强,廖明军,王凯英,等.基于元胞自动机的轨道站非收费区活动模拟[J].武汉理工大学学报:交通科学与工程版,2009,33(6):1215-1218.
[4]Adler J L,Blue V J.A cooperative multi-agent transportation management and route guidance system[J].Transportation Research Part C 2002(10):433-454.
[5]张健钦,陆 锋,王 刚,等.Agent技术在交通管理与出行服务中的应用探讨[J].计算机工程与应用,2009,45(16):238-241.
[6]陆 锋,郑年波,段滢滢,等.出行信息服务关键技术研究进展与问题探讨[J].中国图象图形学报,2009,14(7):1219-1229.
[7]撒 力.一个基于Swarm的人工生态系统模型[J].系统仿真学报,2005,17(3):714-717.
猜你喜欢
作文成功之路·小学版(2019年8期)2019-09-18
人大建设(2019年4期)2019-07-13
小学生学习指导(低年级)(2019年4期)2019-04-22
环球飞行(2018年7期)2018-06-27
传媒评论(2018年11期)2018-02-16
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21
读者(2017年14期)2017-06-27
中国交通信息化(2017年5期)2017-06-06
