
基于递阶模糊控制的锅炉汽包水位控制系统
2010-04-11 01:05莫丽红
淮阴工学院学报 2010年3期
莫丽红,张 涛
(淮阴工学院电子与电气工程学院,江苏淮安223003)
0 引言
对蒸汽锅炉而言,维持水位在一定的范围内是保证锅炉安全运行的首要条件。若水位过高,会影响汽包内汽水分离,导致过热器管壁结垢并损坏,使过热蒸汽温度急剧下降。如果用该过热蒸汽作为汽轮机动力,将会损坏汽轮机叶片,影响运行的安全。若水位过低,则由于汽包内水量较少,当负荷较大时,水的汽化速度会加快,引起水冷壁局部过热而损坏,甚至引起爆炸。因此,锅炉汽包水位必须加以严格的控制。
1 系统动态特性分析
锅炉汽包水位不仅受到锅炉的给水流量(输入量)和蒸汽流量(输出量)之间平衡关系的影响,同时还受到汽水循环管路中汽水混合物内汽水体积变化的影响。因为水位不仅反映了汽包(包括水循环的管路)中的蓄水体积,也反映了水面下汽泡的体积,而水面下汽泡的体积又与锅炉的负荷及蒸汽压力有关。综合来看,影响锅炉汽包水位变化的因素有以下四个主要方面:
(1)给水扰动,包括给水母管压力的变化和给水调节阀开度的变化;
(2)蒸汽负荷的变化;
(3)燃料量的变化,包括影响燃料发热量变化的其它因素;
(4)蒸汽压力的变化。
在蒸汽发生过程中,汽包内部容积可以看成水面上方的蒸汽体积、水面下方的汽水混合体积即汽泡体积和汽包内水的体积三部分组成。由于燃料量对汽包水位的影响有较大的传输滞后和容量滞后,变化十分缓慢,可以忽略不计;而蒸汽压力的变化往往是由于蒸汽负荷变化引起的,因此,压力的变化可以归并到蒸汽负荷中去。这样,汽包水位主要受给水扰动及蒸汽流量的影响。
当给水量阶跃变化,汽包水位并不立即增加,而是有一个反方向变化,这是由于给水流量温度偏低,会带走汽包内汽水混合物中的热量,使水位下汽泡减少,水位下降。
蒸汽流量阶跃变化时,开始阶段由于蒸汽负载增加导致汽包内压力减小,水中气泡增加,使水位不仅没有下降,反而迅速上升,然后再下降,这种现象称之为“虚假水位”[1][2]。
2 锅炉汽包水位常见控制方式
锅炉汽包水位常见控制方法有:单冲量控制,双冲量控制及三冲量控制,这些控制方案通常采用PID算法。由于系统具有非线性、不确定性、延迟、大容量、高参数等问题,仅仅采用简单的PID控制根本无法达到良好的控制效果,其中,单冲量控制系统不能消除虚假水位带来的影响,对负荷变化的反应滞后,对给水流量的干扰也不能及时克服;双冲量系统引入蒸汽流量作为校正信号,虽然可以纠正虚假水位引起的误动作,也能提前发现负荷的变化,但同样不能及时克服给水流量的干扰;三冲量系统引入了给水信号,控制品质有了较大的提高,但增加了控制系统的复杂程度,同时,其 PID 参数也不容易整定[3][4]。
模糊控制无需建立系统精确数学模型,具有较强的鲁棒性,是一种基于知识和经验的控制方式。常见的模糊控制在锅炉汽包水位系统的应用中,有利用模糊控制来整定系统PID参数的,也有将模糊控制直接作为控制器进行控制的。
当模糊控制在汽包水位系统直接充当控制器时,为了提高模糊控制的动稳态性能,有必要将水位偏差变化率及蒸汽流量偏差变化率作为控制器的输入变量,而模糊控制器的规则随着输入变量数量增加呈指数增长,在实际应用中要求很大的内存,并且难以在实际应用中实现。递阶模糊系统是解决这个“规则爆炸”问题的有效方法,它用递阶的形式将几个维数很少的模糊系统连接起来,从而达到大大减少规则库内规则数量的问题。本文提出采用递阶模糊控制方式,对汽包水位进行控制。
3 锅炉汽包水位模糊控制系统的设计
3.1 系统原理图
控制系统原理图如图1所示[5]。
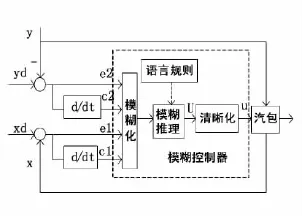
图1 系统控制原理图
系统根据采样的汽包水位x及蒸汽流量y分别与给定值比较,得水位偏差e1及其变化率c1、蒸汽流量偏差e2及其变化率c2,将这4个精确量乘以量化因子转换到基本论域,经模糊化后转换为模糊量,此模糊量作为推理机的前件与规则库中的规则进行匹配,最后得到输出模糊量U,再经过模糊环节转变为精确量,最后再乘以比例因子转换为物理论域中的进水阀开度值。
3.2 模糊控制器输入输出变量定义
模糊控制器为四输入单输出结构,其中4个输入量分别为水位偏差E1、水位偏差变化率C1、蒸汽流量偏差E2、蒸汽流量偏差C2,输出量为进水阀开度 U。E1、E2、U 均取(NB、NM、NS、ZO、PS、PM、PB)7 个模糊值,C1、C2 均取(NB、ZO、PB)三个模糊值,其隶属度定义如图2所示。

图2 输入输出量隶属度定义
3.3 模糊控制规则的确定
模糊控制器为四输入单输出结构,若按照常见的模糊控制方式,可计算模糊控制规则数M的值。

较多的规则会占用大量内存及降低模糊推理速度,考虑采用递阶模糊控制方式[6][7],见图 3。

图3 递阶模糊控制规则
在递阶模糊控制器中,将对系统影响较大的输入量作为第一级变量,影响次之的分别与上一级的输出一起作为下一级规则的前件,依次类推。对于本系统,将E1和E2作为第一级变量,将对系统影响较小的C1和C2分别作为第二级和第三级变量[7]。
第一级模糊控制规则:
If E1 and E2 then U
第一级模糊控制规则:
If U and C1 then U'
第一级模糊控制规则:
If U'and C2 then U"
第一级给出近似输出,此输出的控制作用存在一定的稳态误差,然后通过第二级和第三级的规则集合加以修正。
可求出采用递阶模糊控制方式后的规则数M'的值。

递阶模糊控制规则见表1~3。常规模糊控制方式中,采用的是表1所示第一级模糊控制规则,仅将水位偏差及蒸汽流量偏差作为控制器输入变量,规则数量为49条。
3.4 模糊推理及解模糊
模糊推理采用Mamdani推理方法,规则激活的操作取min运算,对所有被激活的规则结论取max运算,即得到模糊推理结果。
模糊推理所得的结果是一个模糊集或者它的隶属函数,不能直接作为控制量,因而必须将模糊量转换为清晰的数字量。本系统解模糊采用重心法,转换为精确量,乘以比例因子,即可得到进水阀开度。

表1 第一级模糊控制规则(U)

表2 第二级模糊控制规则(U')
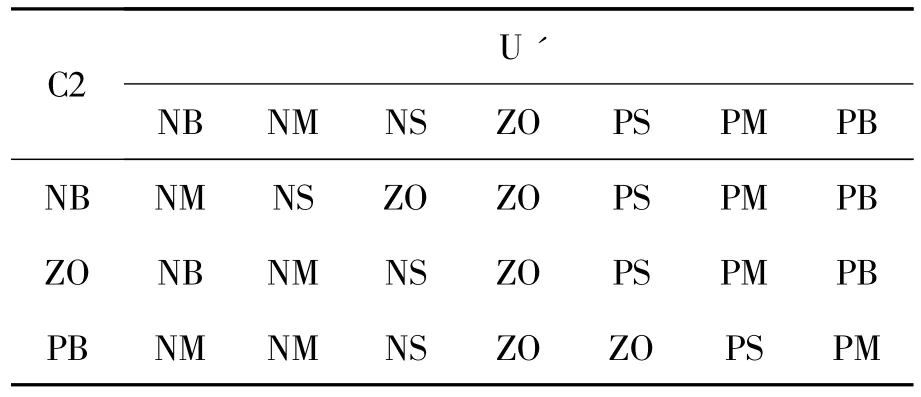
表3 第三级模糊控制规则(U")
4 系统仿真
在MATLAB软件环境下,对常规模糊控制系统及递阶模糊控制系统分别进行了仿真,选取水位误差e1的物理论域为[-20mm,+20mm],则e1的量化因子k1=6/20=0.3,选取水位误差变化率c1的物理论域为[-6,+6],则的量化因子k2=2/6=0.33,同理选取蒸汽流量偏差量化因子k3及其变化率量化因子k4分别为0.3及0.33,选取控制量u的基本论域为[-30,+30],则控制量u的比例因子k5=30/6=5,仿真时间t=60s,两种控制方式下单位阶跃响应曲线如图4所示。从图中可以看出,采用递阶模糊控制,响应时间快,超调即水位波动较小,系统具有更好的稳态及动态性能[8]。
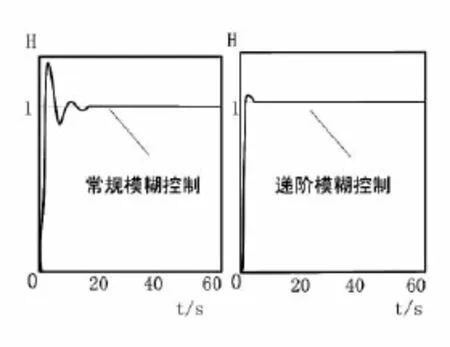
图4 模糊控制与递阶模糊控制仿真曲线
5 结束语
将仿真后的递阶模糊控制应用于某电厂670T/h锅炉汽包水位双冲量控制系统,过热汽包压力为14.2MPa,最终水位偏差控制在30mm以内,控制效果理想。实验结果表明,该方案是可行的,满足锅炉汽包水位控制系统的要求。
本文创新点在于:将递阶模糊控制方式应用于锅炉汽包水位控制,实现水位平衡,克服“虚假水位”,并进行了仿真,具有较好的动态和静态响应特性。
[1]徐春梅,张浩,杨平.汽包水位串级三冲量非线性PID控制系统[J].华东电力,2009,35(5):38 -41.
[2]任登凤,宋飞虎.工业锅炉汽包水位先进PID控制研究[J].计算机仿真,2009,26(7):195 -198.
[3]张益农,肖德云.CFB锅炉汽包水位自校正PID模糊控制研究[J].计算机应用与软件,2004,21(12):34-36.
[4]鄢波,丁维明,魏海坤.基于锅炉汽包水位系统的模糊神经控制研究[J].微计算机信息,2009,25(10):70-71.
[5]易继楷,侯媛彬.智能控制技术[M].北京:北京工业出版社,2004.
[6]李萍.递阶模糊系统设计的一种方法[D].厦门:厦门大学,2002.
[7]莫丽红.输送带系统多电机功率平衡模糊控制器的研究[J].煤矿机械,2004(6):27-28.
[8]朱齐丹.基于约束预测控制的增压锅炉汽包水位系统研究[J].哈尔滨工程大学学报,2009,30(11):46-50.
猜你喜欢
当代水产(2022年3期)2022-04-26
山东工业技术(2016年15期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
上海金属(2015年4期)2015-11-29
电源技术(2015年11期)2015-08-22
中国新技术新产品(2011年23期)2011-12-31
物理通报(2011年8期)2011-01-24
空间控制技术与应用(2010年5期)2010-12-23

- 淮阴工学院学报的其它文章
- H.264中帧内预测模式选择算法的研究