
城市道路交通流仿真系统研究*
2010-04-10 10:42商蕾
武汉理工大学学报(交通科学与工程版) 2010年3期
商 蕾
(武汉理工大学能源与动力工程学院 武汉 430063)
随着计算机科学的飞速发展,交通仿真被越来越多地应用于交通系统分析研究和决策支持中.交通仿真可分为宏观仿真、中观仿真和微观仿真三类[1].其中,微观交通仿真系统能在单车级上模拟“人-车-路-环境”的相互作用关系,反映交通基础设施、交通管理手段、交通流控制策略等对交通流的影响.因此,微观交通仿真建模和系统开发成为国内外的研究热点.
本文在对微观交通仿真模型建模研究的基础上,利用面向对象开发工具和视景仿真环境,搭建一个微观交通仿真系统.该系统能为城市重点城区道路网的扩建改建、交通管理、交通控制方案的制定、交通事故研究提供仿真分析与评价的平台.
1 交通流仿真模型框架
与国外发达国家不同,我国的城市交通环境和驾驶员行为特性有其特殊性.目前,国内外尚无成熟的模型和工具来深入分析、研究我国的交通问题.因此,必须建立符合我国交通流特点的交通仿真模型[2-3].
在此笔者提出如图1所示的微观交通仿真模型框架.其中:

图1 微观交通仿真模型构成框架
1)路网描述模型和交通规则模型属于静态模型,在进入仿真运算后,模型各参数不再发生变化.路网描述模型通过定义合理的结构体,从点、线、面3个层次来反映路网拓扑关系,几何特征等.而交通规则由于往往落实到车道的使用特性上,因此可以通过增加路网描述模型中相应的属性变量来反映.
2)车辆行为模型是整个仿真模型的核心,其有效性直接决定交通流仿真的精度.传统的车辆行为模型主要由跟驰模型和换道模型构成.在单车道或是在不允许超车行为的多车道上,位于后面位置的车辆受到跟驰作用的约束,只能跟着前车行驶.本文采用基于期望车头时距的非线性跟驰模型.在该模型中,后车的加速度不仅与前后两车的相对速度有关,还与两车间距以及驾驶员反应延时有关.跟驰模型为

式中:τ为驾驶员的反应延迟;a为驾驶员对车速和距离的反应参数;b为驾驶员对车头时距的反应参数;L为前车车身长度;T为期望车头时距.
考虑到我国城市混合交通以及驾驶员行为特点,在开发具有自主知识产权的微观交通仿真模型时应补充机动车侧向干扰模型、非机动车干扰模型和行人干扰模型.
3)动态路径选择模型可分为最优路径选择模型和交叉口转向行为模型.其中,最优路径选择模型用以选择旅行总时间最短、旅行花费最小或是旅途中交叉口最少的路线.为了便于评估交通诱导措施对机动车驾驶员行为的影响,本文采用的是动态最优路径选择模型.交叉口转向行为模型则根据路径选择模型的计算结果,确定车辆当前行驶方向和下一个路段行驶方向的相对位置关系,以便车辆在路口执行正确的转向操作.
4)机动车排放模型选取IVE模型,并对IVE模型本地化进行相关调查研究,主要包括:环境影响因素、I/M 制度、燃油使用情况、车辆技术分布情况等.
2 基于实时视景仿真的城市道路交通流仿真系统设计
2.1 开发环境选择
软件主框架和人机交互界面用Visual C++开发[4-5].对于交通仿真数据的存储和管理,则选用Microsoft Access数据库进行.同时,为了使交通流仿真软件能够逼真地再现的三维道路交通流状况,软件的可视化部分由三维建模工具Creator和视景仿真环境Vega来实现(见图2).
2.2 城市道路交通流仿真系统框架设计
本文开发的城市道路交通流仿真系统体系框架如图3所示.
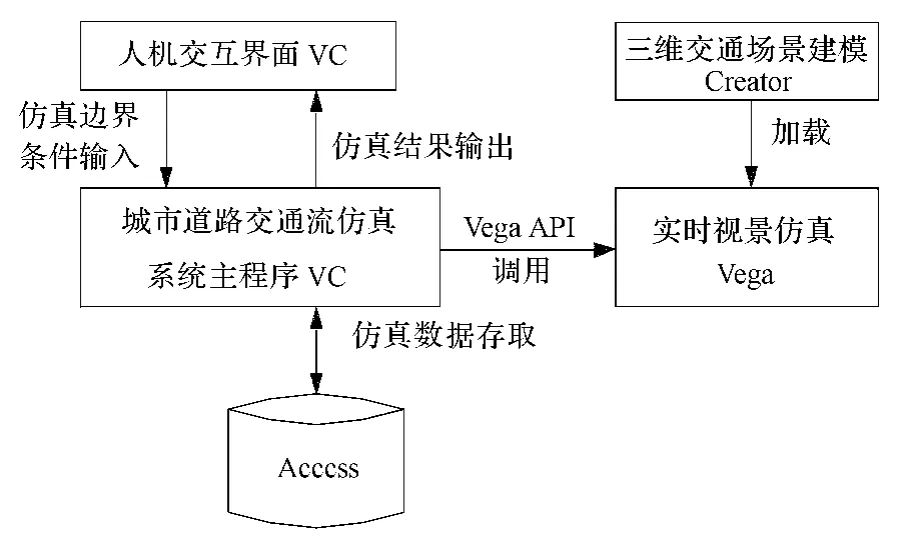
图2 不同开发工具间的数据交互关系图

图3 城市道路交通流仿真系统基本框架
可以看到,该原型系统能够提供较丰富的仿真结果输出,包括:车道(路段)平均车速、最大排队长度、停车延误、机动车排放(主要是CO排放量和NOx排放量).因此,基于自主研发的微观交通流仿真模型,本文开发的城市道路交通流仿真原型系统软件主要可应用于小路网交通管理方案分析与评价,信号控制策略分析,道路基础设施改扩建实施效果评估.以信号控制策略分析为例,其基本仿真流程如图4所示.

图4 交通信号控制策略仿真基本流程图
2.3 实时视景仿真技术的应用
结合虚拟现实技术、图像处理等技术,将视景仿真引入道路交通流仿真系统中.在以文本、图像、图表等二维方式输出仿真运算结果的同时,将路网内每个静态、动态对象的实时状态以三维视景方式进行显示,用户可从直观观测交通流运行状态.通过在Vega环境中设置多窗口、多通道的方法,还能使用户同时监控多个重点区域的交通状况.
本文选择实时仿真环境Vega作为三维可视化平台,仿真模型与视景的交互主要由Vega API函数完成的,基本步骤如下.
步骤1 检测应用定义文件,即ADF文件.ADF文件包含了在三维交通场景中需要显示的所有对象及环境特性.
步骤2 初始化系统,包括视景系统、音效系统、特效系统等.
步骤3 定义视景系统.
步骤4 配置视景系统.
步骤5 用户自定义代码,根据交通流仿真模型运算结果,动态刷新三维场景内交通信号灯显示状态、路网内行驶的机动车、非机动车位置.
3 应用研究
在实地交通调查基础上,运用开发的城市道路交通流仿真系统对北京市清华大学东门路口进行了仿真应用研究,取得了较好的仿真效果.
该路口的车流量情况见图5,信号控制方案见图6,仿真运行效果图见图7,车速及排队长度实时变化曲线见图8.

图5 清华大学东门路口车流量
下面通过调整信号配时,增加交通流量以及改变路口设计分别再次进行仿真,以北进口内侧车道为例,可得到如图9和图10的仿真对比结果.
图中:方案1为现状仿真;方案2为增加北进口左转方向车流量后进行的仿真;方案3为调整信号控制配时后进行的仿真(增加南北进口左转绿灯时长至35 s);方案4为调整北进口道数目(左转方向增加1条车道,其他条件不变)进行的仿真.

图6 路口信号控制方案

图7 两通道三维仿真运行图(俯视图和侧视图)

图8 车速及排队长度实时变化曲线

图9 不同方案下的平均车速

图10 不同方案下的排队长度
由上图可以看出,增加车流量会导致行车速度降低,以及排队长度的增加;而增加绿灯时长和增加车道数,则可以缓解该方向车辆排队情况,提高行车速度.
4 结 束 语
本文基于我国城市道路交通流特点,对城市道路微观交通流仿真的基础模型进行了重点研究.借助计算机开发环境和视景仿真工具,开发了一个基于三维视景的城市道路微观交通流仿真系统软件.该模型仿真系统采用开放式框架体系和模块化的设计思路,具有良好的可移植性和可扩展性.仿真案例研究表明,其仿真效果较好.下一阶段,在基于混合交通流的车辆行为模型以及增强仿真系统的适应性和稳定性方面还有待作更深入的研究.
[1]Serge P H,Piet H L Bovy.State-of-the-art of vehicular traffic flow modeling[J].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2001,215(4):283-303.
[2]陆化普,李瑞敏,朱 茵.智能交能系统概论[M].北京:中国铁道出版社,2004.
[3]陈先桥,严新平,初秀明.分布式交通仿真中网络控制模型研究[J].武汉理工大学学报:交通科学与工程版,2006,30(3):292-294.
[4]邹智军,杨东援.城市交通仿真实验系统的面向对象开发[J].系统仿真学报,2002(7):844-848.
[5]裴玉龙,张亚平.道路交通系统仿真[M].北京:人民交通出版社,2004.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
商用汽车(2021年4期)2021-10-17
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
测控技术(2018年5期)2018-12-09
现代园艺(2018年2期)2018-03-15
汽车与安全(2017年5期)2017-07-20
汽车与安全(2017年3期)2017-04-26
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
舰船科学技术(2015年8期)2015-02-27
