带稳定板装置弹射座椅偏航稳定性能研究
2010-04-07 08:58童明波
空气动力学学报 2010年2期
刘 富,童明波,宋 杰,谭 率
(1.南京航空航天大学飞行器先进设计技术国防重点学科实验室,南京 210016;2.上海飞机设计研究院,上海 200232;3.航宇救生装备公司,湖北 襄樊 441003)
0 引 言
弹射座椅作为飞机上重要的救生装置,其高速弹射阶段的人椅系统姿态(俯仰、偏航、滚转)稳定性是衡量该座椅性能好坏的重要指标之一。当今弹射系统的稳定装置大致分为硬式稳定装置(稳定杆和稳定板)、软式稳定装置(稳定伞和达特系统)和姿态控制动力装置三种形式。现役的我国自主研制的第三代弹射座椅主要有两种稳定方式:以TY6座椅为代表的稳定伞方式和以TY5座椅为代表的出舱稳定装置加稳定伞的组合稳定方式。通过对二级动力偏心距的调整以及安装出舱稳定装置,较好地解决了座椅的俯仰稳定性。但目前我国现役的第三代弹射座椅的偏航稳定性一直未能获得很好的解决[1]。稳定板技术作为高速稳定的有效解决方案已经被现役的美国S4S型座椅和英国MK-16型座椅所采用。相对于稳定杆技术,稳定板技术在我国第三代救生系统上具有更为良好的可移植性。
传统的获取弹射座椅气动参数的方法主要是通过对座椅进行风洞吹风试验测量。随着计算流体力学(CFD)技术的发展,利用数值模拟方法获得弹射座椅的气动参数成为可能[2]。它克服了传统研究周期长,经费和试验样本数量有限等缺点。CFD技术在国外比较早地应用于座椅的各种气动计算[3-5]。在国内,人椅系统的气动计算主要是基于非结构化网格进行的,运用结构化网格进行弹射座椅的数值计算还没有得到广泛应用,且大多限于静态的计算,进行加装稳定板的人椅系统的数值计算更是一个空白。本文针对国内某型座椅,设计合适的稳定板,基于CFD技术,运用结构化网格,对改装稳定板后的座椅进行计算,得到关于人椅系统姿态的气动参数,并且对座椅的弹射过程进行六自由度动态计算。
1 人椅系统数学模型
决定人椅系统姿态稳定性的气动参数主要有三个,分别是体轴系下的滚转力矩系数Cmx、偏航力矩系数Cmy和俯仰力矩系数Cmz。计算人椅系统气动参数的标准体轴坐标系如图1所示,三个气动力矩系数Cmi定义如下:

式中:Mi为人椅系统i方向上的力矩;S为人椅系统正面投影面积;Q为远方来流的动压;ρ∞为自由来流的密度;u∞为自由来流的速度。
俯仰力矩(Mz)、偏航力矩(My)和滚转力矩(Mx)计算如下:

其中dx、dy和dz分别为外力作用点到人椅系统质心的距离,n为人椅系统表面受力单元总数。
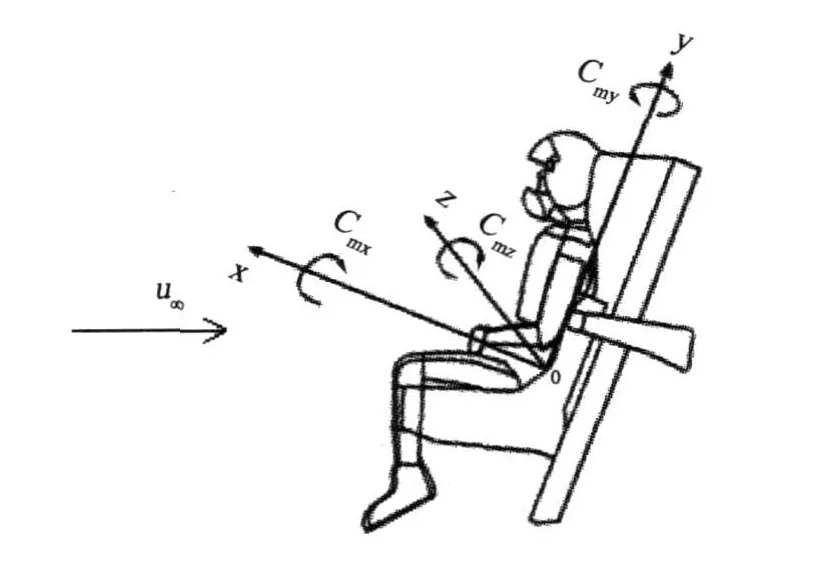
图1 人椅系统标准体轴系下的力矩系数Fig.1 Moment coefficient of seat/occupant system in standard body shaft system
2 人椅系统数值仿真
运用CFD的方法对人椅系统的外流场进行计算就是对描述人椅系统外流场的控制方程进行求解。本文首先建立人椅系统的几何模型,然后进行网格划分,以每一个网格单元为一个控制容积,将N-S方程通过对控制容积的积分得到离散方程,最后对离散方程进行迭代求解[6]。
2.1 稳定板设计及人椅系统几何模型
目前比较成熟并方便移植到国内救生系统上的稳定板技术,主要有图2所示的英国MK-16座椅和美国的S4S型座椅方案。其中,后者距离重心较远,力臂更长,同构型的稳定板理论上可以获得更好的稳定效果。同时,现役座椅上为避免飞行员手臂在高速气流下的甩打,装有可转动的挡臂器。去掉挡臂器,改装限臂网和稳定板,在结构上改动较小,因此本文的稳定板设计参照美国的S4S型座椅稳定板方案。稳定板与座椅以一个可转动的轴连接,非工作状态时,稳定板在座椅两侧挡臂器的位置,工作状态时,沿转轴向后打开一定角度。

图2 英国MK-16型座椅(左)和美国S4S型座椅(右)Fig.2 MK-16 ejection seat of Britain(left)and S4S ejection seat of America(right)
稳定板的外形主要以座椅侧面轮廓为基础,原则是在非工作状态下不超过座椅侧面轮廓,不影响飞行员手臂运动,同时又要有足够的面积,在工作状态下受到足够的气动力。安装好的稳定板下沿应离座椅下沿距离约58mm左右,否则影响到座椅在座舱里的安装。
人椅系统三维模型的仿真度直接影响到流场计算的结果,因此,本文人椅系统三维几何模型的外形尺寸均尽量符合设计图纸和国军标的要求[7]。考虑到人椅系统几何外形复杂,本文所有的几何建模均采用CAD三维建模软件。综合以上设计原则,所设计的稳定板及改装稳定板后的人椅系统三维模型如图3所示。

图3 稳定板设计图(左)及人椅系统三维模型(右)Fig.3 Design drawing of stabilization fins(left)and 3D model of seat/occupant system(right)
2.2 数值计算
CFD领域中,结构化网格具有技术成熟、逻辑关系简单、流场精度高、壁面粘性模拟能力强等优点,但在确定各种复杂外形空间拓扑关系时显得非常困难,特别是难以保证网格的光滑性和正交性。分区嵌套网格,由于可以灵活地处理复杂外形和很好地解决结构网格的自适应问题而被广泛地应用于复杂流场的计算中。本文采用CFDRC软件包中的GEOM模块对人椅系统进行网格划分,并针对静态和六自由度动态两种情况,分别对人椅系统周围的流场进行网格划分,将人椅系统分区网格和周围流场网格进行嵌套。不论是静态计算的流场网格和动态计算的流场网格,均在人椅系统所嵌套的位置加密网格[8-10]。所不同的是,对于动态计算的流场网格,在划分之前,需事先对运动轨迹进行估计,在人椅系统运动所经过的轨迹区域加密网格。两种情况下的最终网格数分别为30多万和300多万。图4为人椅系统的壁面网格,图5为静态计算、动态计算下的人椅系统分区和流场网格的嵌套。

图4 人椅系统壁面网格Fig.4 Wall grids of seat/occupant system
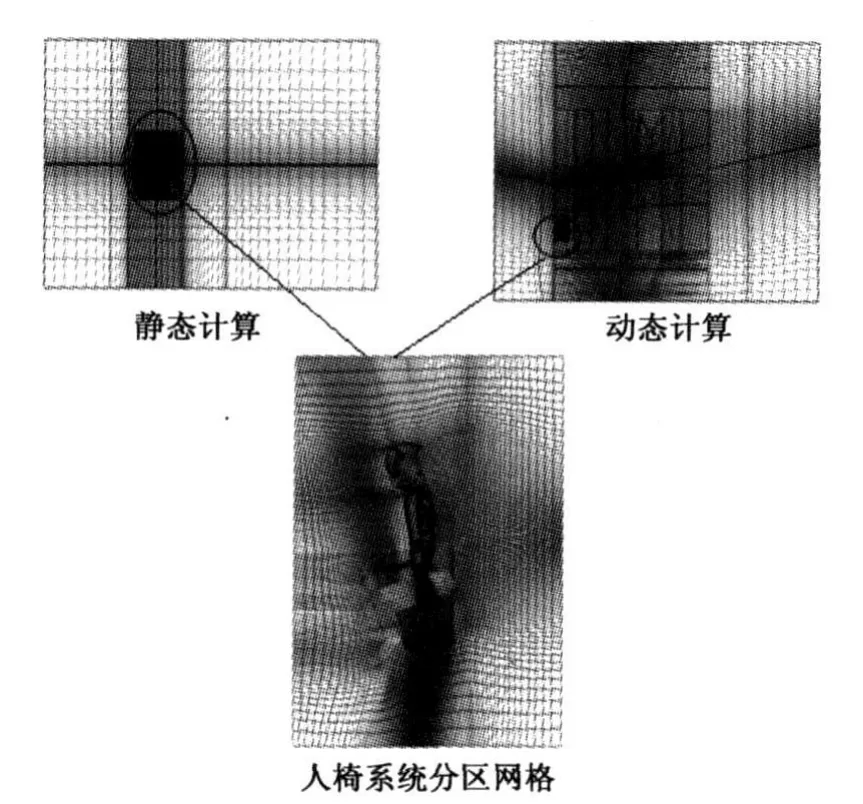
图5 网格嵌套Fig.5 Chimera grids of seat/occupant system and flow field
由于人椅系统是一个钝头体,其后气流成不稳定的湍流,为了准确地模拟湍流流动,计算中引入湍流模型,采用标准两方程模型,在近壁面处的单元采用壁面函数来处理。
3 风洞试验
风洞试验的模型受高速风洞尺寸的限制进行1∶5的比例缩小,模型采用50%分位重量的重心坐标和结构尺寸。采用天平接头实现座椅俯仰角的变化,天平接头通过连接板与座椅相连,利用半模转窗机构实现偏航角的变化。图6为某型座椅风洞试验模型图。
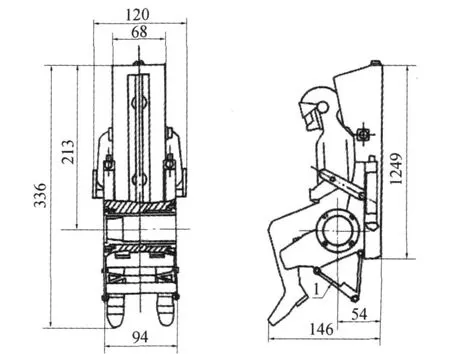
图6 人椅系统风洞试验模型Fig.6 Wind tunnel test model of seat/occupant system
4 计算结果及分析
4.1 静态计算
文中在马赫数M=0.9,俯仰角α=17°状态下,针对有无稳定板两种情况,偏航角β从0°至 40°每隔5°进行一次计算,共得出9种计算工况下的气动参数。图7、图8给出了人椅系统的压力分布图及人椅系统的流场流线图,从图8中可以清楚看出由于人椅系统的钝头体外形而在座椅后引起的气流分离。

图7 偏航角为 15°的压力分布图Fig.7 Pressure distribution when yaw angle is 15°

图8 人椅系统流场流线图Fig.8 Flow pattern of seat/occupant system
图9给出了9个偏航角下,风洞试验(无稳定板)、数值计算(有无稳定板)三种情况的计算对比。通过对比风洞试验和无稳定板的数值计算,可以看出利用CFD计算得到的气动参数与风洞试验所得到的参数变化趋势基本一致;对比有无稳定板两种情况的数值计算,从曲线的斜率可以看出,改装稳定板对于偏航性能有比较明显的改善,而对于俯仰和滚转性能无不利影响,甚至有小幅度的改善。
此外,通过对试验数据和计算数据的比较,可以看出两者吻合的还是不错的,这也为以后座椅的定量分析奠定基础。综合分析,除了人椅系统三维几何模型的建立,网格的划分,以及计算所用模型中参数的选择,人椅系统的转动惯量的取值对计算结果有较大的影响,数值计算中的截断误差、离散误差、舍入误差也是引起结果误差的因素。


图9 力矩系数随偏航角的变化Fig.9 Moment coefficient vs.β
4.2 动态计算
在真实的座椅试验中,由于人椅系统的不对称性,火箭包两侧动力的不同步,会导致小的初始偏航运动,从而使座椅在运动过程中产生很大的偏航角。
动态计算为模拟出舱后的人椅状态,计算了未改装稳定板和改装稳定板后人椅系统模型的弹射运动,计算时施加二级动力(一级动力主要作用时间为出舱前,起到将人椅弹射出舱的作用,出舱后虽未立刻停止,但持续时间极短,因而忽略不计),作用力大小为21245N,作用时间为0.28s,总的运动时间为从出舱到射稳定伞之间的0.4s时间。
图10给出了改装稳定板前后人椅系统的运动轨迹,图11则为相对应的偏航角随时间变化曲线。
由于人椅系统在高速弹射过程中,后面的气流为不稳定的湍流,模型左右网格细微的不对称以及计算时存在的一定误差,会导致人椅系统初始阶段有非常小的偏航运动。这可以从图11的偏航角曲线看出。对于对称模型,这一很小的影响是不应该会造成大的偏航运动,但是对于未改装稳定板的人椅系统,由于没有遏制偏航的措施,前面也已经验证过未加装稳定板的人椅系统是航向不稳定的,只要存在一点偏航角,就会使这一趋势进一步恶化,这一不稳定趋势的发展是发散的,所以人椅系统的偏航自转角度会不断变大,如图11(a)所示。改装稳定板后,由于稳定板的作用,人椅系统所受到的不规则小扰动不会引起更大的偏航自转运动,这种扰动是收敛的。从图11(b)偏航角随时间变化的曲线也可以看出,偏航角变化很小,转动到1.8°左右就开始回复运动,并且呈现趋于稳定的小幅度振荡。从图10(b)可以看出,整个过程中,俯仰角由开始的17°逐渐减小,向趋于有利的俯仰姿态发展。由于没有大的偏航角,人椅模型又是左右对称的,滚转力矩基本为零,无明显滚转运动。
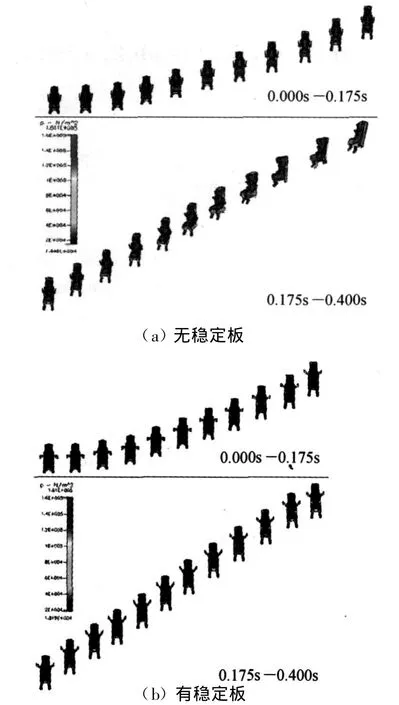
图10 人椅系统运动轨迹(正视图)Fig.10 Motion trajectory of seat/occupant system(front view)
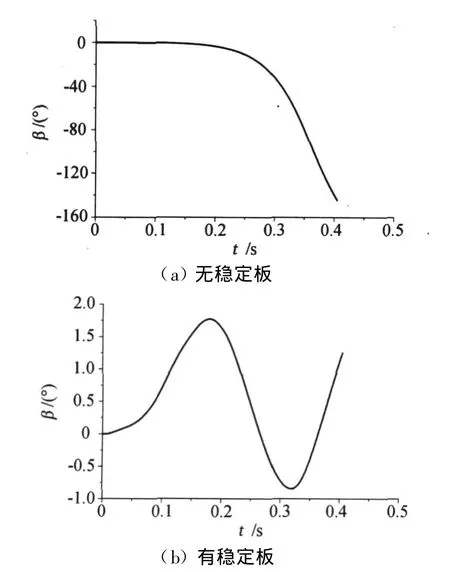
图11 偏航角随时间变化曲线Fig.11 Time history of yaw angle
5 结 论
(1)通过CFD计算与风洞试验对比,可以看出计算得到的结果与试验结果吻合比较好,说明所建立的仿真模型是可信的。
(2)在不影响俯仰性能和滚转性能的前提下,稳定板的改装对人椅系统的偏航性能有比较明显的改善作用。
(3)六自由度动态计算比较准确地模拟了人椅系统出舱的整个运动过程,进一步验证了所设计的稳定板对人椅系统偏航稳定性的改善效果。
(4)为了进一步提高计算精度,减小误差,需要对计算模型做更加准确的研究。为了获得最佳的稳定效果,稳定板的外形、安装位置等方面也将有很大的设计空间。
[1]沈尔康.航空弹射救生装备[M].北京:航空工业出版社,1988.
[2]ROCK S G,HABCHI S D.Numerical simulation of controllable propulsion for advanced escape systems[R].AIAA-97-2254,1997:325-333.
[3]D C KENZAKOWSKI,B J YORK,S M DASH.Computational simulation of ejection seat aerodynamics with rocket propulsive effects[R].AIAA-97-2253,1997:314-324.
[4]ROCK S G,HABCHI S D.Computationalinvestigation of wind tunnel support interference for an ejection seat test[R].AIAA-99-3184,1999:1-13.
[5]HABCHI S D,HO S Y,HUFFORD G S.Computational aerodynamic analysis of the navy aircrew common ejection seat[R].AIAA-94-0395,1994:1-14.
[6]HABCHI S D,HUFFORD G S.Navier-Stokes computational analysis of the B-1A escape capsule[R].AIAA-95-0187,1995,P1-17.
[7]GJB 4856-2003.中国男性飞行员人体尺寸[S].
[8]ROCK S G,HABCHI S D.Validation of an automated chimera methodology for aircraft escape systems analysis[R].AIAA-98-0767,1998:1-10.
[9]焦予秦,乔志德.嵌套网格粘性流动数值模拟用于风洞洞壁干扰研究[J].流体力学实验与测量,2002,16(1):43-49.
[10]李孝伟,范绪箕.基于动态嵌套网格的飞行器外挂物投放的数值模拟[J].空气动力学学报,2004,24(1):114-117.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
劳动保护(2018年5期)2018-06-05
北京航空航天大学学报(2017年1期)2017-11-24
无人机(2017年10期)2017-07-06
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年5期)2016-11-16
舰船科学技术(2016年1期)2016-02-27
汽车实用技术(2015年8期)2015-12-26