
基于UG的汽车手刹虚拟装配技术应用
2010-03-28 03:56周晓刚
装备制造技术 2010年9期
周晓刚
(健雄职业技术学院,江苏 苏州 215411)
装配是按一定的精度和技术要求,将一组零散的零件,按一定的次序连接组合成产品的过程。其核心内容,是装配序列规划,对产品的质量起着关键性的作用。另一方面,装配环节也是制约生产自动化的主要因素,装配性能的好坏,是决定产品能否采用自动化装配的关键。因此一个好的装配顺序规划和工艺规划,对改进产品设计、降低成本、缩短产品生产周期具有重要意义。
虚拟装配从根本上改变了传统的产品设计和制造模型,在实际生产之前,首先在虚拟制造环境中,完成虚拟产品原形代替实际产品进行试验,对其可行性和装配性进行评价,从而达到整个产品全局最优,缩短产品设计和制造周期,降低产品开发成本,提高产品快速响应市场变化的能力。随着国家工业化和信息化速度的加快和虚拟实现技术的不断成熟,软件、硬件的更加完备,虚拟装配技术在企业得到越来越广泛的应用。
UGNX作为一种当前最流行的高端三维CAD软件,其具有强大而丰富的功能模块,越来越受到青睐。UGNX提供了多功能模快,它们相互独立又相互联系,常用的模块有:基本环境,零件建模,装配,工程图等。其中其装配模块又具有非常显著的特点,使得UG在虚拟装配技术应用方面得到越来越多的应用。
1 汽车手刹基座工程图的创建

图1 基座三维图

图2 基座工程图
(2)设置视图的显示,添加基本视图,在基本视图工具条中选择,并选择比例为1∶1,在合适的位置放置视图,同理放置其他方向的视图,添加剖视图。
2 手刹主要零部件的装配
2.1 部件装配

图3 添加组件对话框
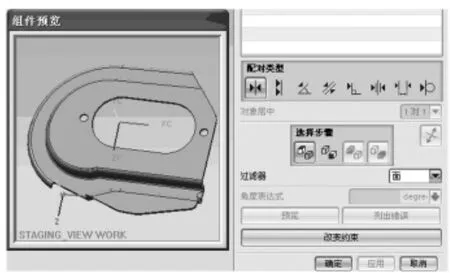
图4 配对条件
按照相同的方法完成手刹棘爪部分的虚拟装配,棘爪的装配如图8所示。在002与001装配体的基础上单击装配命令,打开008与006装配后的装配体,用同样的装配方法将其装配起来,装配结果如图9所示。

图5 零件006配对面

图6 零件008配对面

图7 加载图

图8 棘爪的装配图

图9 手刹的装配图
2.2 装配过程中约束关系的分析
配对条件应用在装配中定位组建,可以指定一个部件相对于装配体中的另一个部件(或特征)的放置方式和位置。UG中配对条件的类型包括配对、对齐和中心等。每个组件都有唯一的配对条件,这个配对条件由一个或多个约束组成,每个约束都会限制组件在一个或几个自由度,从而确定组件的位置。在应用配对条件时应注意以下方面:
(1)使用配对和对齐时,两个参照必须为同一类型(例如平面对平面,点对点);
(2)在添加平行约束的时候,适当的添加距离约束,可以更清楚的表示平行约束;
(3)当两个旋转曲面的直径不相等,轴线选取无效或不方便选取时,可以选择使用中心约束。
2.3 装配干涉的检查
干涉检查,就是对机械产品在运动过程中,可能出现的碰撞或干涉进行检查。干涉检查是动态装配仿真的关键部分,尤其是复杂的空间运动机构。在实际的产品设计中,当产品中的各个零部件组装完成后,往往要检查零部件之间的干涉情况。
干涉检查的主要方法,有创建干涉体简单干涉检查和高亮显示面简单干涉检查。干涉检查的步骤:在装配状态下选中需要检查干涉关系的装配虚拟件,通过点选干涉检查按钮可以计算出两两虚拟件之间的干涉状态。如不干涉或者干涉体积。图10和图11为lever arm与grip的装配高亮显示面简单干涉检查结果,橙色部分为干涉部分。

图10 干涉检查设置

图11 干涉检查结果
3 结束语
以UG NX软件为平台,以汽车手刹组件为产品设计对象,利用虚拟装配技术,成功地在计算机虚拟环境中,完成了产品的装配过程,并对装配体进行干涉检验。可根据检验结果,修改设计。大大缩短了新产品的开发设计过程,降低成本、提高了产品质量。采用合理的虚拟装配的方法,对设计数据进行有效的管理,虚拟装配将在以后产品的设计和制造中发挥越来越重要的作用。
[1]章兆亮.UGNX5.0宝典[M].北京:电子工业出版社,2009.
[2]张广礼.UG18基础教程[M].北京:清华大学出版社,2002.
[3]李 宏.虚拟装配技术的研究现状与发展趋势[J].现代制造工程,2004,(12):114-116.
[4]高 奇,徐 平.虚拟装配技术在减速器设计中的应用[J].辽宁工程技术大学学报,2006,25(增刊):239-240.
猜你喜欢
五金科技(2022年3期)2022-06-30
航空发动机(2021年1期)2021-05-22
装备制造技术(2020年12期)2020-05-22
少儿科学周刊·少年版(2020年9期)2020-03-04
科学导报·科学工程与电力(2019年17期)2019-10-21
制造业自动化(2019年2期)2019-06-24
大众汽车(2019年1期)2019-04-24
人民交通(2016年6期)2017-01-05
