钢筋混凝土无损检测的手持式探地雷达研制*
2010-03-19 01:18刘丽华吴秉横方广有
湖南大学学报(自然科学版) 2010年9期
戴 舜,刘丽华,吴秉横,方广有
(1.中国科学院电子学研究所,北京 100190;2.中国科学院研究生院,北京 100049)
混凝土无损检测技术(NDT)是指在不破坏结构构件的前提下,直接从结构物上测试及推定混凝土强度或缺陷以及钢筋位置.目前常用的混凝土无损检测方法包括回弹法、超声法、超声回弹综合法、红外成像法、光纤传感法、冲击波检测法、电磁感应法和雷达波检测法等[1].其中回弹法和超声回弹综合法主要用来测量混凝土强度;超声法常用来检测混凝土内部缺陷,其穿透能力强但准确性较差;红外成像和光纤传感法只适用于混凝土表面损伤检测且价格昂贵;冲击波法用于测量单面结构混凝土厚度和缺陷,其在复杂条件下精度不高;电磁法用于测定钢筋直径、位置和保护层厚度,探测深度较浅,受钢筋直径和相邻钢筋距离制约.
超宽带探地雷达(GPR:Ground Penetrating Radar)具有穿透性强,回波信息丰富,探测深度深,空间分辨率高,对介电常数变化敏感和结果直观等优点,国外学者从1980年开始将超宽带探地雷达用于混凝土无损检测[2].近年来探地雷达已广泛应用于钢筋位置和保护层厚度检测,混凝土内部缺陷检测及PVC管等其他物体检测[3-5].本文介绍了一种适用于混凝土无损检测的无载频脉冲超宽带探地雷达系统,其功耗低,设计新颖,体积小巧,使用方便.
1 GPR探测原理
探地雷达探测原理如图1所示,图中系统由发射机,接收机,收发天线,信号控制,数据采集与处理单元构成.发射机产生皮秒级的宽带脉冲信号,该信号经紧贴地表的宽带发射天线耦合到地下介质,经目标反射、散射后的部分电磁波能量被接收天线捕获,并转变为电压信号供后端处理.由于目标的距离及散射特性存在差异,接收机接收到的不同目标的回波信号幅度及时延也会存在差异,通过对接收数据进行处理,识别这些差异便可以实现对目标的检测.通常混凝土中的钢筋为强反射目标,单道波形在目标处显示为较高的信号幅度,堆积图显示为双曲线回波,双曲线的中心代表了钢筋位置,双曲线的位置与形状则与钢筋的直径有关[6].

图1 探地雷达探测原理图Fig.1 Schematic diagram of the detection principle of GPR
设收发天线距离为x,地下目标的深度为H,电磁波速为v,地下介质电磁特性均匀,不考虑色散效应,由接收到的目标回波相对于脉冲发射的双程传播时间

即可计算出目标深度H.
探地雷达精度分析常采用地震波反射理论[7],按Reyleigh准则,取λ/4作为垂直分辨率的极限,则

式中:Δd为雷达样机的最低垂直分辨率;λ为电磁波长;fc为天线中心频率;εr为介质的相对介电常数.
水平分辨率通常由Fresnel反射带决定[8],从该反射带的回波相位差不应超过λ/4,则该反射带直径为

由式(2)和式(3)可知,介质的相对介电常数越大,天线的中心频率越高,则雷达的垂直分辨率越高,而水平分辨率除上述因素外,还与待测目标的埋深有关.
2 GPR系统及设计
2.1 GPR系统总体设计
根据钢筋混凝土的检测要求,手持式GPR需要有较高的分辨率,合适的探测深度以及灵活的控制显示方式,满足上述需求的系统结构框图如图2所示.

图2 手持式探地雷达系统结构框图Fig.2 Structure sketch of the handheld GPR system
2.2 射频模块设计
射频模块是手持式探地雷达的重要组成部分,其性能直接影响到检测效果.考虑到钢筋混凝土的厚度较薄,钢筋埋藏较浅,直径和间距较小的目标特征,区别于一般探地雷达深层远距的探测特点,本雷达系统的射频模块采用了皮秒级无载频脉冲发射机,基于等效采样原理[9]的脉冲接收机以及小型化宽带天线.
发射机主要包括由微波三极管、肖特基二级管和阶跃恢复二极管构成的阶跃信号产生电路和高斯脉冲产生与整形电路[10].阶跃信号产生电路利用微波三级管的高速开关特性,将来自控制端的方波信号转变为具有快速下降沿的阶跃信号.高斯脉冲产生电路利用阶跃恢复二极管的阶跃特性以及RC电路充放电过程,在前级阶跃信号驱动下产生高斯脉冲信号.该信号经肖特基二级管整形后可得到Vp-p为2~10 V,脉宽300~500 ps,脉冲重复频率1 MHz的皮秒级单周期负脉冲信号,通过调节电路参数和供电电压可改变输出脉冲的宽度与幅度.
超宽带脉冲接收机主要由互补宽带微波三级管、肖特基二级管、保持放大器、宽带变压器和取样相位检测器(SPD)组成[11],其中SPD包含一只阶跃恢复二极管(SRD),两个保持电容和一对肖特基二极管.接收机包括脉冲产生电路,取样门和基带信号产生电路.宽带变压器将来自控制端的步进延时方波信号转换为两路平衡信号,该信号通过互补宽带微波三级管转换为完全对称的正负窄脉冲信号,用作取样门电路的取样脉冲.SPD在取样脉冲驱动下将雷达回波信号进行等效采样,通过基带信号产生电路的保持放大作用将皮秒量级的脉冲信号展宽为毫秒量级的基带脉冲信号.实测接收机转换增益为7~10 dB,对应取样带宽为6 GHz,动态范围为50 dB,灵敏度为-46 dBmW.
收发天线由两个并排放置、中心频率为2 GHz的椭圆偶极子天线组成[12].天线的振子由一个半椭圆和半圆组成,优化后的椭圆长轴a=21 mm,短轴b=12 mm,半圆半径为b,中心馈电点之间距离为2 mm.天线辐射臂的末端通过一个500 Ω的电阻与高度为40 mm的反射腔相连.天线采用特性阻抗为100 Ω的平衡馈电方式,利用宽带巴伦[13]匹配馈线与天线.整个射频模块采用普通FR-4环氧玻纤布基板,有效降低了模块成本.
2.3 控制模块硬件设计
控制模块由基于ARM内核的嵌入式处理器构建,包含雷达时序控制单元和数据处理与显示单元,其硬件结构如图3所示.

图3 嵌入式控制模块硬件结构图Fig.3 Hardware structure of the embedded control module
数据处理与显示单元是嵌入式控制模块的核心之一,在其控制下系统完成雷达主控配置、数据采集、图像处理和数据存储功能.处理器采用TI OMAP3530,它是一款双核芯片,包括一个600 MHz的基于Cortex-A8的ARM处理器和一个430 MHz的基于TMS320C64+的DSP核,并附有图像加速器.该单元扩展了256 MB的DDR SRAM,512 MB的NANDFLASH,带触控的4.3英寸反射型LCD显示屏、控制按钮,SD卡接口以及USB接口等,能够满足实时显示、雷达控制、数据存储与通讯等一系列功能需求.
雷达时序控制单元采用基于Cortex-M3的STM320F103处理器,内置有精度为12 bit,采样率为1 MHz的AD转换器、高级控制定时器、多个SPI接口以及充足的GPIO接口.单元通过控制由DS1023与SY89297U延时芯片构成的两级延时电路提供最小时延为5 ps,最大探测时窗为130 ns的步进延时控制信号,同时采用多个电平转换芯片完成LVPECL和LVCOMS/LVTT L电平的信号转换.
嵌入式控制模块的总体工作流程如下:OMAP3530通过SPI总线对STM32F103发送射频模块初始化配置参数启动射频模块,采样接收机的输出基带模拟信号通过STM32F103内置的A/D转换器变为数字信号,在内部叠加去噪后通过SPI总线上传.STM32F130应用定时器通过中断方式对光电编码盘输出的两路相位相差90°的脉冲信号进行计数,记录数值作为雷达回波信号的道头位置信息.在OMAP3530控制下,程序调用内置的DSP核进行相应的数据成像处理,LCD实时显示雷达采集波形并将采集数据及时保存到存储器中,方便后期雷达图像的识别算法研究.
2.4 控制模块软件设计
控制模块软件包括时序控制处理器底层软件和雷达显示处理应用软件.考虑到该探地雷达系统需现场采集数据、实时传输以及显示信息等应用特点,基于微软公司的Windows CE定制了嵌入式操作系统,并开发了相应的BOOT LOAD启动程序及相关驱动程序.探地雷达应用软件采用多线程、双显示缓冲池等技术来完成雷达参数设置、数据存储、实时波形图像显示、已存储波形数据回放以及成像处理等功能.应用软件处理模块流程图如图4所示.
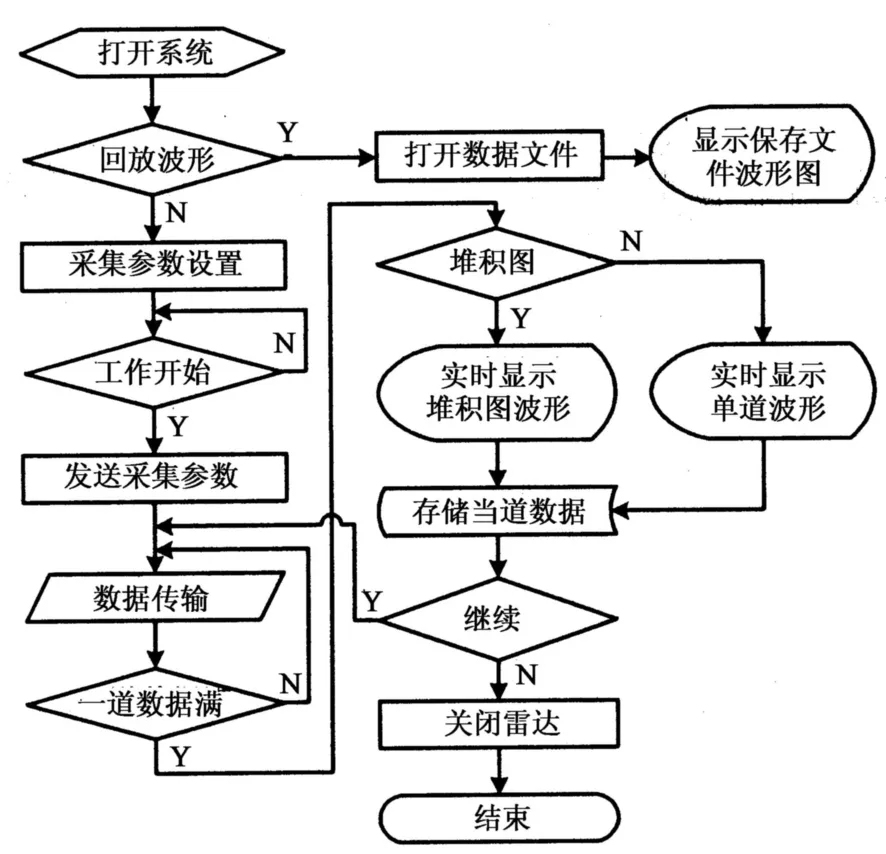
图4 软件处理模块流程图Fig.4 Software flowchart of the embedded control module
手持式探地雷达样机如图5所示,底部有4个滚轮,含电池重量约1.1 kg,外形尺寸为205(长)mm×144(宽)mm×82(高)mm,单手即可操作.

图5 手持式探地雷达样机图Fig.5 Photo of the handheld GPR prototype
3 实验与分析
将发射天线与接收天线水平对置,构成直接通路来验证系统探测的准确性和可靠性.图6所示为实验室条件下天线间距为10 cm时测试得到的接收机下采样后的雷达回波图像.
为模拟探地雷达进行浅层探测时的典型应用环境,雷达样机实验采用测量沙坑中预埋钢筋的方式进行.雷达样机参数设置如下:发射机偏置电压为±5 V,发射脉冲底宽为300 ps,幅度约为4 V、重复频率为1 MHz,步进延时Δt=20 ps,步进长度N=511,时窗T=Δt×N=10.22 ns.
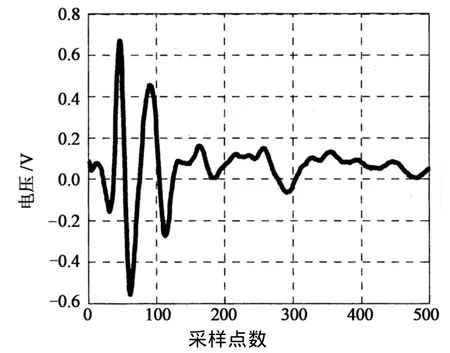
图6 直接通路测试图Fig.6 Diagram of the direct-path transmission test result
实验1 对沙坑内深10 cm,直径6 mm,长度30 cm的钢筋进行测量.7根钢筋并排放置,间隔按1 cm,从10 cm,依次递减至5 cm.设置雷达为距离触发模式,触发间隔为1.5 cm,采集波形如图7所示,可发现共存在5个尖峰和1个平台,其中前4个尖峰波形相对明显,第5个尖峰与后一个尖峰将要合并,第6个和第7个尖峰已合并为一个平台,尖峰表示该处为钢筋,而平台为多根钢筋的波形混叠在一起的结果.对比测量实验的预设条件可知,两根深度为10 cm,间距为6 cm的钢筋仍可分辨.由式(3)可计算此时的Fresnel带直径为12.2 cm,对应的水平分辨率为6.1 cm,与实验结果相符.
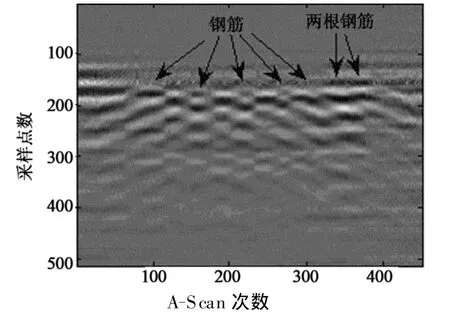
图7 水平分辨率实验结果Fig.7 Result of the horizontal resolution experiment
实验2 对沙坑内水平间隔20 cm,直径10 mm,长度30 cm的螺纹钢进行测量.4根钢筋按埋深从25 cm按5 cm依次递增到40 cm.采集波形显示如图8所示,图中发现存在4个尖峰回波,其中对应25 cm埋深的回波幅度最大,深度越大则回波幅度越小,在深度为40 cm时波形微弱但仍可分辨.这是由于沙坑中沙粒较深处含水量较高,介电常数较大,电磁波衰减快.按照沙的介电常数为4,混凝土为5~8进行换算,则雷达探测深度可达35 cm以上.

图8 探测深度实验结果Fig.8 Result of the detection depth experiment
实验3 对28 cm厚的混凝土砖砌墙进行探测,在墙体中存在配电箱以及金属电线管.墙体试验采用距离触发模式,采样间隔为5 mm.雷达采集波形如图9,图中可见金属电线管道的明显双曲线回波以及金属配电箱的平台状回波.

图9 墙体探测实验结果Fig.9Result of the concrete wall detection experiment
4 结 论
本文介绍了超宽带手持式探地雷达的结构和工作原理,阐述了射频模块和控制模块的软硬件设计方法.该雷达系统发射机脉冲幅度可调,最小脉宽为300 ps,接收机取样带宽为6.4 GHz,动态范围为50 dB,灵敏度为-46 dBmW,时序控制单元可提供最小延时步进为5 ps,探测时窗达130 ns的步进延时信号,基于嵌入式技术的数据处理与显示单元可实时处理和显示雷达采集图像并保存数据.实验测试结果表明,系统在一定探测深度中具有较高水平分辨率.整机结构简单,工作稳定,价格低廉,满足浅层高分辨率地表穿透探测特别是钢筋混凝土的无损检测要求.
[1] MCCANN D M,FORDE M C.Review of NDT methods in the assessment of concrete and masonry structures[J].NDT and E International,2001,34(2):71-84.
[2] CLEMENA G G.Nondestructive inspection of overland bridge decks with G round-Penetrating radar[R].Washington D C:Transpotation Research Board of the National Academy of Sciences,1983:21-32.
[3] MALLINSON P.Surface penetrating radar as an NDT tool[J].Insight:Non-Destructive T esting and Condition Monitoring,1997,39(12):874-877.
[4] BUNGEY J H.Sub-surface radar testing of concrete:a review[J].Construction and Building Materials,2004,18:1-8.
[5] HE X Q,ZHU Z Q,LIU Q Y,et al.Review of GPR rebar detection[C]//Progress In Electromagnetic Research Symposium.Beijing:2009:804-812.
[6] SHIHAB S,AI-NUAIMY W.Radius estimation for cylindrical objects detected by ground penetrating radar[J].Subsurface Sensing Technologies and Applications,2005,6(2):151-165.
[7] SHERIFF R E,G ELDART L P.Exploration seismology[M].New York:Cambridge University Press,1995.
[8] PEREZ-GRACIA V,GONZALEZ-DRIGO R,CAPUS D D.Horizontal resolution in a non-destructive shallow GPR survey:an experimental evaluation[J].NDT and E International,2008,41(8):611-620.
[9] IVCHENKO V G,KALASHNIKOV A N,CHALLIS R E,et al.High-speed digitizing of repetitive waveforms using accurate interleaved sampling[J].IEEE T rans on Instrumentation and Measurement,2007,56(4):1322-1328.
[10]谢义方,方广有.基于无载频脉冲式超宽带雷达的生命信号检测分析与实现[J].数据采集与处理,2009,24(5):664-670.XIE Yi-fang,FANG Guang-you.Analysis and implementation of vital sig nal detecting using base-band pulse UWB radar[J].Journal of Data Acquisition and Processing,2009,24(5):664-670.(In Chinese)
[11]REISENZAHN A,BUCHEGGER T.Ultra-wideband sampling down converter with sampling phase detectors[C]//IEEE M T T-S,International Microwave Symposium Digest,Long Beach,USA:2005:1887-1890.
[12]吴秉横,纪奕才,方广有.一种新型探地雷达天线的设计分析[J].电子与信息学报,2009,31(6):1487-1489.WU Bing-heng,JI Yi-cai,FANG Guang-you.Design and analysis of a novel GPR antenna[J].Journal of Electronics and Information Technology,2009,31(6):1487-1489.(In Chinese)
[13]SU H.Investigations of RC-loaded bow-tie antennas for impulse g round penetrating radar applications[D].Manitoba:Dept of Electrical and Comptuer Engineering University of M anitoba,2006.
猜你喜欢
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
天津教育·下(2018年9期)2018-07-13
通信电源技术(2018年3期)2018-06-26
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
现代防御技术(2014年6期)2014-02-28
河南科技(2014年5期)2014-02-27
电力自动化设备(2013年11期)2013-09-18