
静止型动态无功补偿在10kV电网中的应用
2010-03-19 12:27吴宁
电气技术 2010年3期
吴 宁
(扬州环洲船用材料有限公司,江苏 扬州 210044)
1 引言
随着电力电子技术及控制技术的发展,交流调速的性能与成本已能和直流调速竞争,而交流电动机的维护工作量却大大少于直流电动机,所以交流调速取代直流调速已成为趋势。例如,在新建有色和黑色金属加工生产线上,大型轧机的电气传动都采用了交-交变频控制技术,我公司新投建的850轧机也采用了交-交变频控制技术。
然而新技术的应用,在实践过程中也出现了新的问题,主要是用电负荷的电流波形中含有冲击无功分量和丰富的谐波分量,这些都对电网造成了严重污染。为此我公司根据电网的实际污染情况,就轧机负荷对电网产生的无功功率冲击与谐波进行了分析,提出了采用静止型动态无功补偿系统(SVC)的技术方案,既抑制了由于冲击性无功功率引起的电网电压波动,又对谐波进行了治理。
2 SVC系统的控制原理及组成
(1)系统的控制原理
SVC系统常用的主要有两种方法,我公司采用的是晶闸管控制相控电抗器方法(又称TCR)。控制原理:根据用电设备负载的无功功率情况,用连续调节与电抗器串联的晶闸管的触发延迟角来控制自身电抗器的感性无功功率。当负载的无功功率大时,电抗器的无功功率就小;而当负载的无功功率小时,电抗器的无功功率就大;使负载的无功功率加上电抗器的无功功率之和保持基本不变。对电网而言,虽然总的无功功率是增加了,但对电网的无功功率波动(冲击)却是减少了,电网电压波动也就减少了。
如图1所示。图中TCR控制器的输入是负载的无功功率分量Qf和给定的允许无功功率冲击量△Q*,其输出是晶闸管装置的触发延迟角α,即相当于TCR动补装置输出的感性补偿无功功率QTCR。控制器比较△Q*和Qf,当Qfmax-Qf=△Q≤△Q*(Qfmax负载的最大无功分量)时,控制器输出的α使QTCR等于零。当△Q>△Q*时,控制器输出的α使QTCR等于△Q=△Q*。当△Q=Qfmax(即Qf=0)时,控制器输出的α使QTCR等于Qfmax-△Q*,TCR动补装置输出的感性补偿无功功率达到其最大值。这样就可以保证当负载的无功功率分量Qf在0~Qfmax之间波动时,对电网的无功功率波动始终不会大于给定的允许无功功率冲击量△Q*。
除了抑制电网电压波动,还要就负载和TCR补偿装置产生的谐波进行治理,提高电网的功率因数(cosφ)。通常采取在电网侧并联无源滤波器来抑制进入电网的谐波电流,同时无源滤波器对基波而言呈容性,即能提供容性的无功功率,从而提高了电网的功率因数。
(2)系统的组成
SVC系统包括滤波电路、晶闸管控制的相控电抗器(又称TCR)电路、晶闸管控制单元。滤波电路根据负载和TCR补偿装置产生的谐波电流,来确定各次谐波滤波电路及补偿功率。我公司采用了3、5、7、11次滤波电路,每次滤波电路由电抗器和电容器串联形成。TCR电路采用了三角形回路,每一支回路为双电抗器串联晶闸管接线方式。系统主回路接线方式如图2所示。
晶闸管控制单元包括控制柜、脉冲柜和功率单元组成。控制柜作用是采集现场的电压、电流信号,计算处理后发出触发脉冲,同时监控系统运行情况。脉冲柜作用是将触发脉冲转换为符合要求的脉冲信号,实现晶闸管触发。功率单元包括晶闸管、热管散热器、热管阻容保护、热管击穿检测等等。控制单元如图3所示。
3 SVC系统的参数计算
以我公司新投建的850轧机主传动为同步电动机为例,采用交-交变频器供电,电网供电单线图如图4所示。
主要用电设备技术数据如下:
主传动电机5000kW,1650V,1815A一台。
主传动三裂解变压器3×3300kVa,10kV/1150V一台。
主传动励磁整流变压器450kVa,10kV/550V一台。
10kV母线的短路电流最大运行方式11kA,最小运行方式8.6kA。
(1)无功功率冲击与电压波动
以轧机主传动2.5倍过载作为最大的无功功率冲击,其他用电设备的无功功率冲击很小,可以不考虑。
有功功率

视在功率

无功功率

注:Pn为主传动电机额定功率,kW;In为主传动电机额定电流,A;U2为主传动变压器二次线电压,kV。
10kV母线短路容量按最小运行方式计算

10kV母线电压波动

根据国标要求10kV母线电压波动为3%以内,现已超过较多,因此需要动态无功补偿。
(2)所需的动态无功补偿量
10kV母线允许的无功功率冲击量为

所需动态无功补偿量为

采用TCR补偿方式,TCR的无功补偿量取9 M var即可。
(3)注入电网的总谐波电流
由于轧机主传动交流同步电动机系交-交变频器供电,有3次谐波存在,以电动机额定电流为基准,参考计算机纺真所得结论计算谐波电流值见表1。

表1
TCR动补装置产生的谐波电流
相控电抗器的基波额定电流

为提高动态性能,相控电抗器的相对阻抗取70%,TCR动补装置各次最大谐波电流分别为
注入电网的总谐波电流
由于TCR也产生谐波电流,当TCR输出最大时,轧机负载正好是最小,而轧机负载最大时,TCR输出却是最小,所以轧机负载和TCR输出不可能同时最大。因此在计算注入电网的总谐波电流时,应该把轧机负载和TCR的谐波电流进行比较,取其大值作为注入电网的总谐波电流。
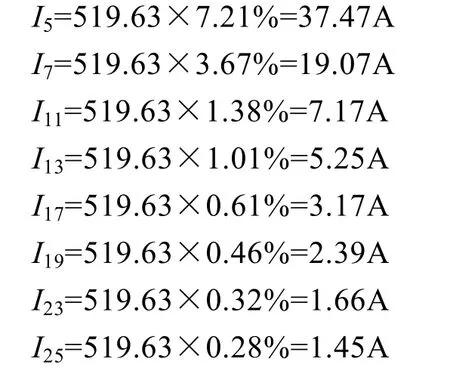
根据前述计算结果经过比较,轧机负载各次谐波电流均大于TCR各次谐波电流,因此注入电网的总谐波电流为:∑I3=21.5A;∑I5=80.32A;∑I7=59.94A;∑I11=36.9A;∑I13=28.67A;∑I17=18.69A;∑I19=16.52A;∑I23=12.2A;∑I25=10.89A。
(4)无滤波器时10kV母线的电压畸变率按最小运行方式计算,10kV母线的阻抗为:XS=U2/ Skmin=102/149=0.6711Ω,各次谐波电流造成的10kV母线电压畸变率为
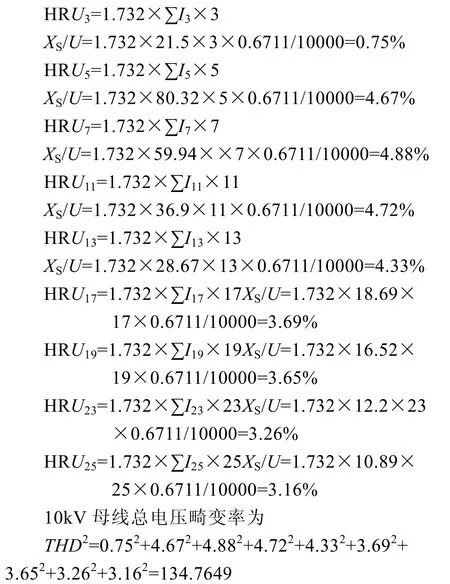
THD=11.61%,对于10kV电网,总电压畸变率不得超过4%。现已超标较多,因此需加滤波器进行谐波治理。
(5)滤波器的无功补偿量
由于交-交变频器有频谱较广的旁频,而且有频率较低的旁频,所以应设置带高通的滤波支路。而3次、5次、7次、11次的谐波电流较大,故设置3次、5次、7次、11次4个滤波支路。
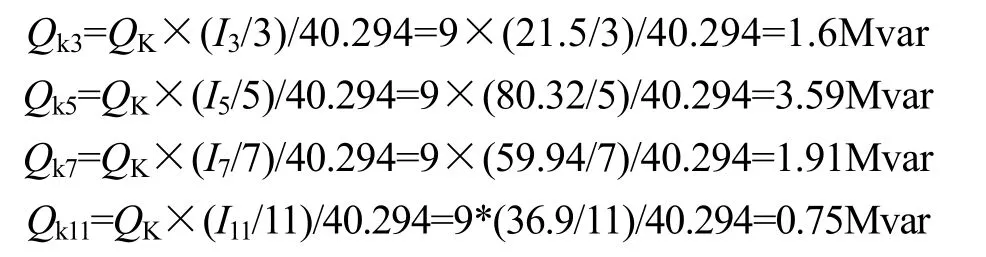
TCR的无功补偿量是9Mvar,对电网而言,负载的无功功率加上TCR的无功功率基本上是一个恒定的滞后无功功率,功率因数很差,需要利用滤波器把该滞后无功功率补偿掉。通常取滤波器应有的无功补偿量与TCR的无功补偿量相等。各滤波支路分配的无功补偿量Qkh=QK×(Ih/h)/ ∑(Ih/h),式中∑(Ih/h)=∑I3/3+∑I5/5+∑I7/7+…+∑I25/25=21.5/3+80.32/5+59.94/7+…+10.89/25=40.294A。
(6)相控电抗器参数
TCR的无功补偿量为Qk=9M var,接线方式采用三角形联结,则相控电抗器的额定电流应为

如前所述,取相控电抗器的相对阻抗为ZTCR%=70%,则相控电抗器的基波阻抗值电感值应为Z=UZTCR%/ IN=10×103×70%/300=2.33Ω,相控电抗器的电感值为
LTCR=Z/(2πf)=2.33×103/(2×3.14×50)=7.42mh为减少短路危险性,将每相的相控电抗器一分为二,每个相控电抗器的数据为额定电流:350A;电感值3.8mh。
4 效果测试
通过系统的安装调试、投运和对10kV电网的测试,得出以下结论:
(1)静止型动态无功补偿系统(SVC)的动态响应时间快,大大满足了轧机的冲击负荷的动态无功补偿。
(2)控制系统采用三相全控的数字控制装置,比以往的模拟控制方式结构简单,控制精度高,响应时间快。
(3)监控装置可以随时直观的查看系统设备的运行参数、曲线、历史纪录、故障记录等,方便了日常维护。
(4)SVC系统容量的选择是足够的,投入使用后,经过实测各项数据达到设计要求,电网质量也符合国家标准各项要求,功率因数(cosφ)达到0.92以上。
5 应用效益
(1)直接效益
同样以850轧机主传动同步电动机为例。
1)SVC系统未投用之前,10kV电网的功率因数(cosφ=0.7)左右,按负载率80%计,有功功率P=5000×0.8=4000kW,视在功率S=P/cosφ=4000/0.7=5714kVA。每月生产按26天计,每天生产16h,每月用电量5714×26×16=2377024kW·h,10kV电价平均为0.63元/kW·h,每月电费为0.63×2377024=1497525.12元。由于功率因数未达到国家标准,电费增加10%,每月总电费为1497525.12×(1+10%)=1647277.63元。
2)SVC系统投用之后,10kV电网的功率因数(cosφ=0.92),按负载率80%计,有功功率P=5000×0.8=4000kW,视在功率S=P/ cosφ=4000/0.92=4348kVA。每月生产按26天计,每天生产16h,每月用电量4348×26×16=1808768kW·h,10kV电价平均为0.63元/kW·h,每月电费为0.63×1808768=1139523.84元。由于功率因数达到国家标准,电费减少0.3%,每月总电费为1139523.84×(1-0.3%)=1136105.27元。
3)所以安装了一套静止型动态无功补偿系统(SVC),每月节约电费支出1647277.63-1136105.27=511172.36元。而一套静止型动态无功补偿系统价值200万元左右,只要4个月就可收回设备成本。
(2)间接效益
1)无功功率和母线电压波动的明显减少,降低了变压器及用电设备的自身损耗,提高了使用效率。
2)谐波的治理和母线电压畸变率的明显减少,减少了通信信号的干扰,提高了自动控制系统及电气测量仪表的准确率,同时延长了用电设备的使用寿命。
[1] GB/T 14549-1993.电能质量.公用电网谐波.北京:中国标准出版社,1993.
[2] GB 12326-2000. 电能质量.电压波动和闪变.北京:中国标准出版社,2000.
[3] GB 10236-1998.半导体电力变流器与电网互相干扰及其防护方法导则. 北京:中国标准出版社,1998.
[4] 供电营业规则.电力工业部1996年发布施行.
[5] 王兆安等编著. 谐波抑制和无功功率补偿.北京:机械工业出版社,1998.
[6] 马小亮著. 大功率交-交变频调速及矢量控制技术,北京:机械工业出版社,2004.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
电力设备管理(2022年3期)2022-03-18
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
通信电源技术(2016年5期)2016-03-22
东北电力大学学报(2015年1期)2015-11-13
电力建设(2015年2期)2015-07-12
电测与仪表(2015年5期)2015-04-09
电子设计工程(2015年12期)2015-02-27
电测与仪表(2014年20期)2014-04-04
