
基于磁敏元件的双重纠错绝对式编码油缸设计
2010-02-20 07:42刘毅
装备制造技术 2010年4期
刘 毅
(同济大学机械电子研究所,上海200092)
随着电力电子技术的发展,采用微功耗的集成磁敏元件进行非接触式测量,是传感检测技术的重要发展方向。针对长行程液压缸的位移检测,文献[1]和文献[2]提出了基于磁场强度测量的油缸位移测量方法。该方法采用一个线性霍尔元件,对油缸活塞杆齿槽内的磁场强度进行测量,霍尔元件通过移位读取绝对位置编码。但是该方法需要模数转化,初始运动较大一段距离后,才能读数测量,并且按照帧重叠进行的编码序列,不具有唯一性,这不利于编码的标准化扩展。为解决上述问题,文献[3]提出了一种利用磁敏元件阵列的数字式位移测试方法,在编码识别中采用具有标识码的间隔移位读数方法,测量分辨率小于霍尔元件的轴间尺寸。但是,该方法的测量结果不能跨越两个完整码区,所以不能进行码值的逐位纠错。本文使用微功耗集成霍尔元件TLE4913,设计一种基于以上基础的双重纠错编译码油缸,通过编码过程的码区填充和译码过程的逐位纠错,使测量分辨率小于霍尔元件的轴间尺寸的同时,提高位移测量过程的可靠性和抗干扰能力。该方法在长行程油缸位移测量中具有很高的性价比。
1 磁敏元件的选择
磁场检测所用的磁敏元件主要包括半导体磁阻和霍尔器件,它们都可以制成集成线性器件和开关器件。当作为开关器件使用时,选择磁敏元件则主要关心磁敏元件的体积、测试探头的尺寸以及探头封装的垂直度,磁敏元件的面积与被测磁场的面积相比越小,磁场检测的分辨率和精度越高。
如图1所示为微功耗集成霍尔开关TLE4913,SC59-3-x贴片封装,供电电压2.4~5.5V,输入电流1 μA,导通电流1 mA,长度和宽度均为3 mm,磁敏感区小于0.5 mm。该芯片价格便宜,内部集成误差补偿和逻辑运算电路,抗干扰能力强,并且具有4 kV静电保护,正常工作温度为-40~85℃,适应工程应用中液压油缸的作业环境。此外,该芯片工作电压和功耗都很低,能够适应由电池直接供电的场合,如制成无线位移传感器等。
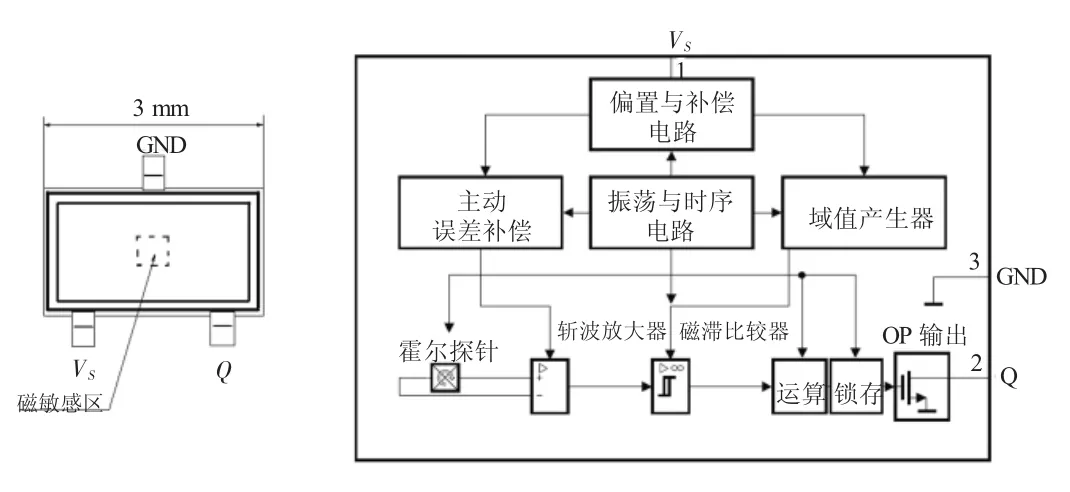
图1 霍尔元件TLE4913结构原理
2 活塞杆编译码的设计
2.1 活塞杆编码原理
工业工程领域中,长行程油缸作为执行机构应用十分广泛,特别是在大型、重型设备(如大型水闸提升设备、海洋工程、工程机械等)中,使用极其普遍。采用传统方法对长行程油缸进行位移测量时,必须使用大量程的位移传感器,如拉线式传感器、磁致伸缩传感器等,显然既不经济,安装十分困难,并且不能进行绝对位移测量。
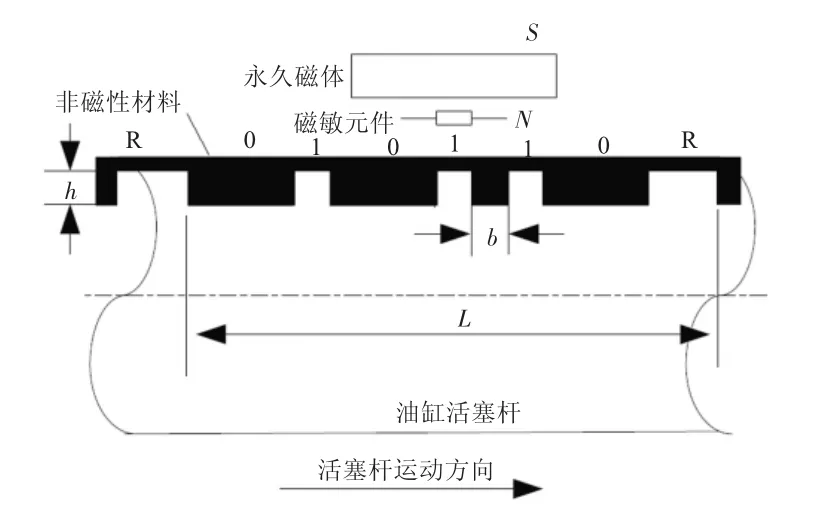
图2 磁敏元件位移测试原理
根据文献[3]所述,采用如图2所示的非接触式测量结构。在被测的铁磁性材料工作部件(即油缸活塞杆)表面加工有凹槽和凸槽,上面喷涂有非磁性材料(如陶瓷)。霍尔元件按照排列方向与活塞杆平行安装,当相对活塞杆运动时,能够检测到凹凸部位不同的磁场强度。以单位宽度为b(mm)的凹槽表示数据位“0”或填充位,以单位宽度的凸槽表示数据位“1”或标志位,凹槽或凸槽的高度均为h(mm)。标志位用两个连续的凸槽表示,相邻两个数据位之间,或者数据位与标志位之间,均有一个填充位。所以,在活塞杆表面任取一个码段,出现连续凸槽的一定为标志位。另外,数据位的编码规则采用格雷码,因为格雷码在相邻两个码值转化时,只有一位元素发生变化,可以减少逻辑混淆和实现纠错。
按照图2所示的编码方法,若活塞杆上每个码段数据的位数为m,则每个码段的长度为L=(2m+3)×b,可测量的活塞杆总长度为S=2m×(2m+3)×b。若槽宽b=2 mm,当m=6时,S=1 920 mm,当m=10时,S=47 104 mm。实际中,数据码的位数由油缸的设计行程决定,数据码位数每增加一位,可测量的油缸总行程将成倍增加。
霍尔元件的排列覆盖两个码段,这样在任意时刻都能读取一个完整的码段。磁敏元件的排列方法,在一维范围内受元件尺寸的限制,轴间距应>3 mm;在二维范围内受油缸轴径的限制,径向范围排列以2~3组为宜。
2.2 一维霍尔阵列的译码

图3 磁敏元件的一维排列结构和滑动码区
按照一维直线排列霍尔元件,设数据位m=6,轴间距为N=4 mm,则码段长度为L=30 mm,覆盖两个码区需要16个霍尔元件,霍尔阵列平行与活塞杆。当活塞杆从左往右运动时,霍尔阵列每次读取16位二进制序列,如图3(a)所示。
在X=X0时刻,霍尔阵列读取到二进制序列为

该序列中能够找到或补全标识码序列,因此能够计算初始位移

其中,D为标识码的前置数值码,t为标识码右移的位数,p根据标识码完整与否取为0或者2,具体分析参照文献[3]。但是,上述霍尔元件阵列读取到的二进制序列是间隔的,因此不保证具有唯一性,所以初始读数可能出现错误译码。
在X=X0+b时刻,霍尔阵列读取到二进制序列为

将两次读取到的二进制序列错一位合并成32位序列,即得到一段滑动码区

从该滑动码区低位的某一位开始(记为k第位),总能找到两组连续的“11”,即为标志位R,其中间的低12位部分即为数值码(带填充位的格雷码,其十进制值记为D),如图3(b)所示。因此,此时的位移

以上方法使用了滑动码区,使测量分辨率小于霍尔阵列的轴间尺寸,所用霍尔元件较少。但是,间隔读数所得的序列不具有唯一性,因此上电后第一次读数可能出现误读。
2.3 二维霍尔阵列的译码
如图4所示,按照二维平面排列两组霍尔元件,PCB布线时使霍尔元件公共地在一条直线上。当活塞杆从左往右运动时,霍尔阵列每次读取32位二进制序列,用同样的方法判定标志位的位置,可求得活塞杆的位移l。

图4 磁敏元件的二维排列结构
二维排列使霍尔元件数量增加了一倍,但是每次读数使用静态码区,滑动码区仅用于填充位和格雷码规律双重纠错,因此实现了完全绝对式带纠错测量。
2.4 活塞杆的测试实验
制作一段按照图1所示编码规律、编码长度S=480的活塞杆,采用如图3所示的译码和纠错方式制作传感器电路板,译码芯片采用XC164CS单片机,该芯片内置CAN控制器,能够为传感器建立CAN总线接口。位移测量结果通过串口发送到计算机(如图5所示),为活塞杆匀速运动和产生阶跃时传感器的跟踪曲线。

图5 活塞杆运动测试曲线
3 结束语
利用磁敏元件绝对式编码测量油缸位移,相对传统接触式和模拟测量方式而言,具有安装方便、功耗低和可靠性高等特点,在长行程油缸绝对位移测量中具有良好的应用前景。本文设计了一种使用霍尔开关TLE4913的编译码方案,在试制的油缸活塞杆上进行了实际测试,测试结果表明该编译码方案具有良好的测量精度和纠错能力。
[1]潘 峰,丁 凡.帧重叠编码方法及其在行程传感液压缸磁性标尺中的应用研究[J].仪器仪表学报,2003,24(4):364-367.
[2]潘 峰,丁 凡.基于磁场测量的行程传感液压缸技术的研究[J].中国机械工程,2003,14(2):24-26,
[3]陈耿彪,乌建中,王达华.基于磁敏传感技术的位移测量编码与识别[J].电子测量与仪器学报,2008,(22):483-485.
[4]古松一.液压缸活塞杆的陶瓷保护层和行程测量系统[J].水力发电,1995,(5):39-41.
[5]龚向东,王 晨,喻开安.一种测量液压油缸位移的新方法[J].机械与电子,1995,(4):7-8.
[6]尚群立,殷玲玲.基于磁阻原理非接触式位移测量的非线性方法[J].仪器仪表学报,2007,28(3):524-528.
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
中国设备工程(2018年15期)2018-08-08
中国新技术新产品(2016年21期)2016-12-08
山东工业技术(2016年15期)2016-12-01
中国设备工程(2015年2期)2015-12-27
太空探索(2015年6期)2015-07-12
汽车零部件(2014年5期)2014-11-11
中国新技术新产品(2014年21期)2014-03-28
