
堆垛机自适应模糊优化控制方法研究
2010-02-19 07:48:16王鑫国陆金桂
制造业自动化 2010年13期
王鑫国,陆金桂
WANG Xin-guo,LU Jin-gui
(南京工业大学 自动化与电气工程学院,南京 211816)
0 引言
堆垛机的工作效率是自动化立体仓库工作效率的瓶颈,提高堆垛机工作效率的关键是提高堆垛机的运行速度,但堆垛机的运行速度提高以后,会增大堆垛机运行时的振动和噪声,为了保证堆垛机的安全运行,堆垛机的运行速度是有限制的[1]。另外,堆垛机在启动和停止时也必须对运行速度加以控制,从而保证堆垛机的启停平稳和精确定位。
堆垛机运行速度的常规控制方法是有级换挡调速。即堆垛机具有几个固定的运行速度(如高、中、低速3种速度),堆垛机启动和运行过程中使用高速运行,接近目标位置时将速度降为中速,快到目标位置时,采用低速运行,以便精确定位[2]。这种调速方式的缺点是速度切换有阶跃性,对堆垛机有一定的冲击。
堆垛机平稳运行过程中通常采用恒速运行,国内外查到的关于堆垛机速度控制的论文,大部分都是研究堆垛机速度控制的稳定性,如采用模糊PID或串级控制实现堆垛机速度的平稳控制[3,4]。
事实上,堆垛机的运行过程中,随着工作状态的变化,其最高允许速度也是变化的,完全可以考虑通过堆垛机的变速度运行方式来提高工作效率。接下来我们具体介绍堆垛机最佳运行速度的自适应模糊优化控制方法。
1 堆垛机最佳运行速度与堆垛机载货重量、载货高度及启停状态的关系
对于相同的载货重量,堆垛机的载货高度越高,堆垛机的重心越高,运动时产生的力矩越大,立柱的变形和堆垛机的振动量也就越大,其最高允许速度越小。
对于相同的载货高度,载货重量越大,轮子与轨道的摩擦力越大,堆垛机的振动量也就越大,其允许的最高速度越小。
另外,堆垛机启动过程中,速度应该逐步提高,以减少对堆垛机的冲击;堆垛机接近目标货位时,速度应该逐步减少,货位定位准确后,速度减为零。
通过上面的分析可知,对于高速堆垛机运行速度的优化控制应该做到如下几点:
1)堆垛机的速度尽量快;
2)堆垛机的速度变化尽量平滑;
3)不同载货高度采用不同的运行速度
4)不同载货重量采用不同的运行速度
5)启动过程速度逐步提高
6)货位对准过程速度逐步降低
2 堆垛机运行速度模糊优化控制方法
这里我们采用模糊优化控制的方法来实现堆垛机运行速度的优化控制目标,实现堆垛机的高速平稳无级调速。
2.1 模糊控制简介
模糊控制也是一种自动控制技术,与传统自动控制相比,在控制方法上应用了模糊数学理论,但它所进行的仍然是确定性工作;它不仅能成功的实现控制,而且还能模仿人的思维方法,对一些无法构造数学模型的被控过程进行有效控制[5]。
2.2 模糊控制器结构设计
我们使用Matlab下的fuzzy模糊工具箱来设计模糊控制算法,控制器结构如图1所示,模糊控制模块的输入变量有堆垛机载货高度height,堆垛机与目标货位的水平距离length,堆垛机载货重量weight,输出变量是堆垛机的最佳运行速度velocity。
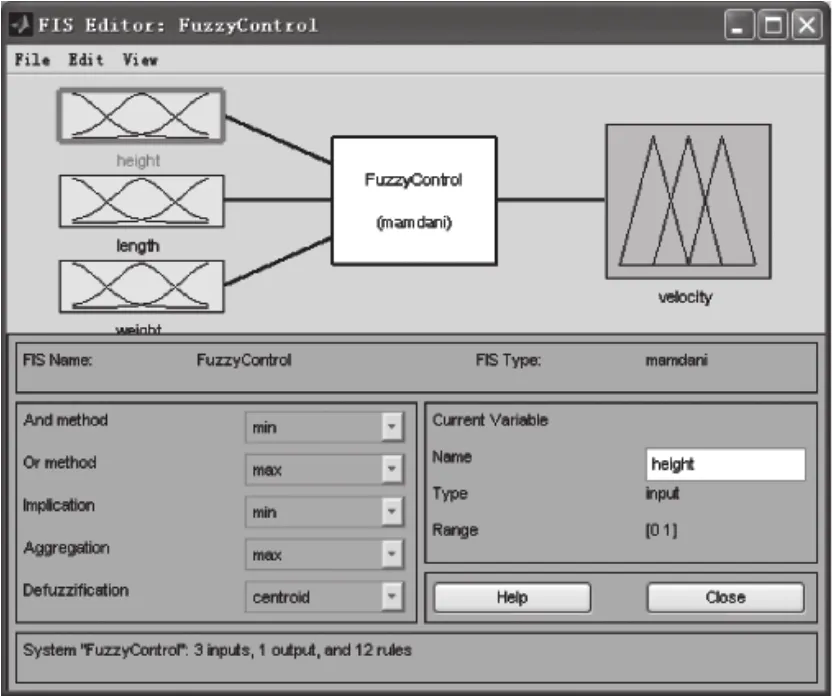
图1 模糊控制器结构
2.3 模糊变量隶属度函数设计
模糊控制中隶属度函数的设计是模糊控制器输出是否平滑的关键。
1)载货高度height的隶属度函数设计如图2所示,具有高低两个模糊变量。

图2 载货高度height的隶属度函数
2)堆垛机载货重量weight的隶属度函数设计与载货高度height的隶属度函数相同(图2),具有高,低两个模糊变量。
3)堆垛机当前位置与目标货位的水平距离length的隶属度函数设计如图3所示,具有高中低三个模糊变量。
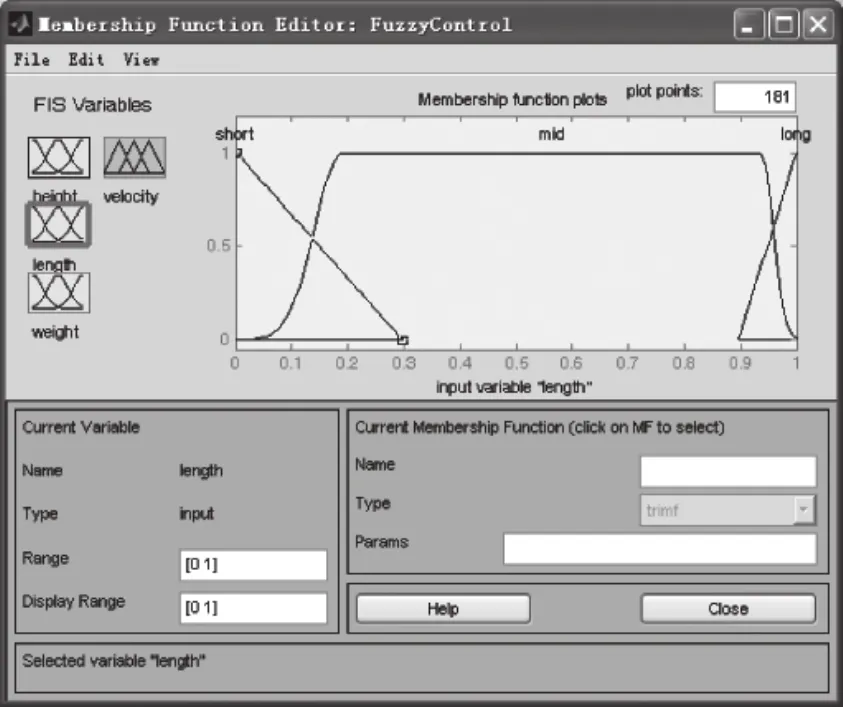
图3 水平距离length的隶属度函数
4)模糊控制输出变量是堆垛机的最佳运行速度velocity,它的隶属度函数设计如图4所示,具有7个模糊变量。
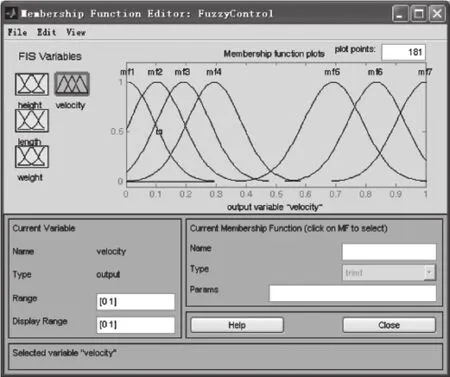
图4 堆垛机运行速度velocity的隶属度函数
2.4 模糊控制规则的设计
根据堆垛机速度控制的策略,模糊控制规则汇总如下表所示。
2.5 模糊控制效果检验
使用模糊工具箱主菜单view下的Surface功能来检验模糊控制的控制效果。
堆垛机载货高度height与堆垛机最佳运行速度velocity的关系曲线如图5所示,可以看出载货高度越高堆垛机的最佳运行速度越小。
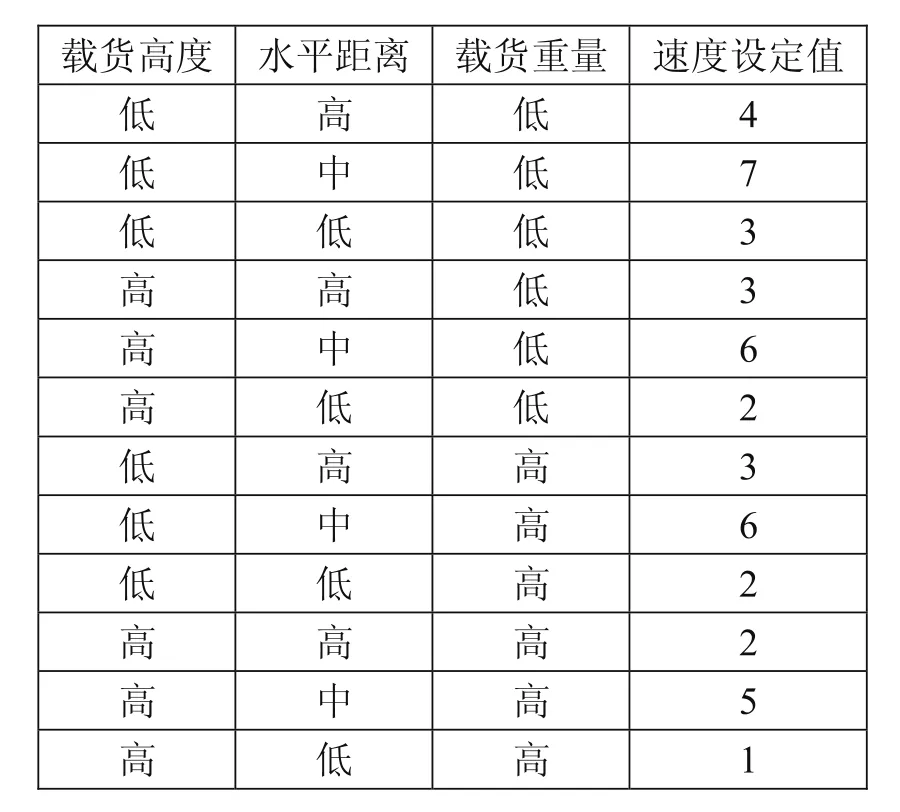
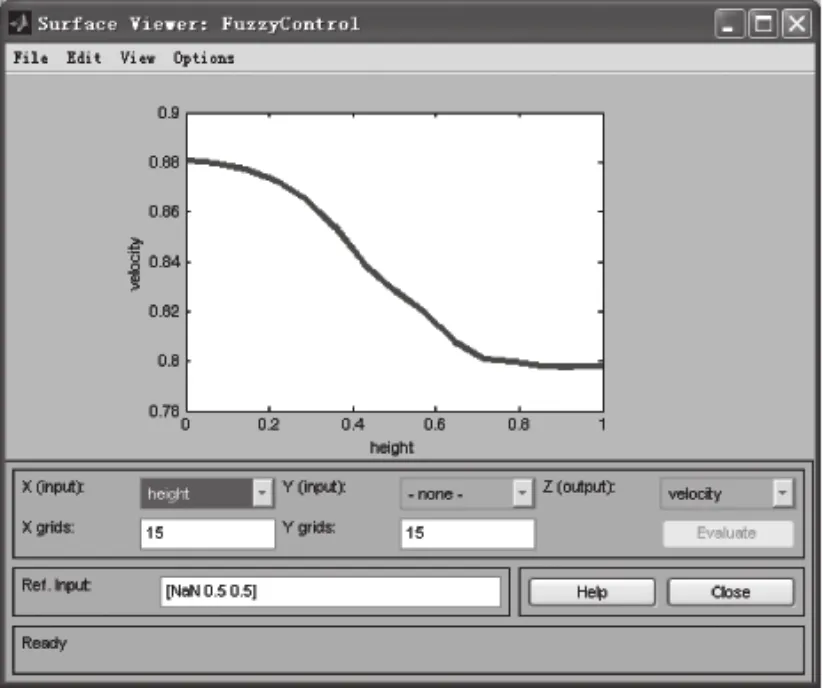
图5 载货高度与运行速度的关系曲线
堆垛机与目标货位的水平距离length与堆垛机最佳运行速度velocity的关系曲线如图6所示,可以看出启动时速度慢慢增加,然后平稳,接近目标货位后速度慢慢降低。
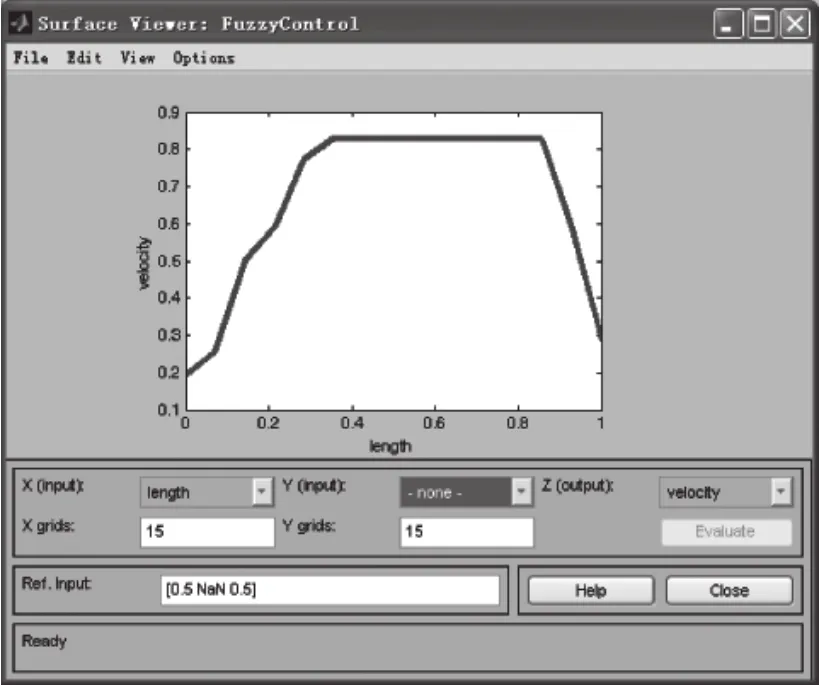
图6 水平距离与运行速度的关系曲线
堆垛机载货重量weight与堆垛机最佳运行速度velocity的关系曲线如图7所示,可以看出载货重量越重,堆垛机最佳运行速度越小。
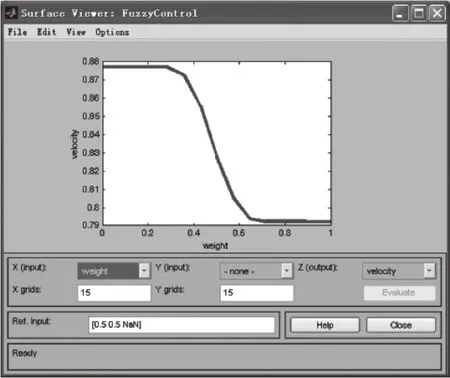
图7 载货重量与运行速度的关系曲线
堆垛机载货高度、载货重量与堆垛机最佳运行速度的关系曲面如图8所示。

图8 高度、重量与速度的关系曲面
从以上分析我们可以看出,各影响因素与堆垛机最佳运行速度之间的关系曲线及关系曲面都比较光滑,也就是说模糊控制器的控制效果较好,此模糊控制算法可以用于堆垛机运行速度的优化控制。
3 基于模糊优化控制算法的堆垛机速度优化控制系统实现
堆垛机运行速度优化控制系统由PLC(可编程控制器)、变频器、交流电机,传感器、机械传动机构等组成。传感器包括激光测距仪、重量传感器、光电传感器等,重量传感器完成载货重量G的测量,激光测距仪完成堆垛机水平位置X的测量,光电传感器完成载货高度位置H的测量。
控制系统工作原理如图10所示。PLC实时监测堆垛机当前的运行状态,将运行状态X(堆垛机水平位置)、H(堆垛机载货高度)、G(堆垛机载货重量)送给PLC内部的堆垛机运行速度模糊优化控制模块,该模块根据模糊控制规则推理出堆垛机的当前状态下的最佳速度,将此速度作为堆垛机运行速度的设定值。
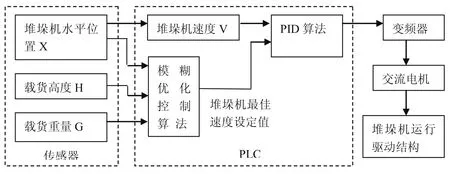
图9 堆垛机模糊控制原理图
堆垛机运行速度本身采用PID闭环控制,可以通过堆垛机水平位置X的变化率来计算堆垛机的速度V。经PID运算后的控制量通过PLC的D/A模块转化为电流信号去控制变频器,变频器再通过改变电源频率控制电机的转速,从而控制堆垛机的运行速度。
模糊优化控制算法具体实现时,可以根据设计的模糊控制算法计算出模糊控制表,然后把该控制表保存在堆垛机的PLC存储块中,PLC运行时,根据检测的位置、高度和重量信号进行在线查表,输出堆垛机最佳速度的设定值。该方法无需完成模糊推理过程,程序设计简单,同时保证了系统的实时性。
4 结论
本文研究了堆垛机平稳运行过程中的最佳运行速度与载货重量、载货高度的关系,探讨了堆垛机启动和制动过程中对堆垛机速度的控制要求,研究了堆垛机运行速度的模糊优化控制方法,制定了合理的隶属度函数和模糊推理规则,实现了堆垛机运行速度的最佳控制,提高了堆垛机的平均速度和平稳性。
[1]陈旭东.自动化立体仓库中堆垛机的位置定位和速度控制[J].基础自动化,1998(6):48-50.
[2]常发亮.堆垛机械的速度控制和位置定位方法[J].机械工业自动化,1998,20(1):47-49.
[3]周克良.模糊PID控制在立体仓库堆垛机速度控制中的应用[J].起重运输机械,2008(9):108-110.
[4]许宜贺.基于串级PID控制技术的堆垛机控制器的设计[J].微计算机信息,2006,22(11):104-105.
[5]曾光奇.模糊控制理论与工程应用[M].华中科技大学出版社,2006.
猜你喜欢
物流技术与应用(2021年11期)2021-12-27 05:17:20
商用汽车(2021年4期)2021-10-13 07:15:52
装备制造技术(2020年11期)2021-01-26 00:38:58
物流技术(2020年5期)2020-06-27 13:05:30
计算机与数字工程(2018年11期)2018-11-28 09:47:00
制造业自动化(2018年10期)2018-11-02 09:51:40
电测与仪表(2016年13期)2016-04-11 11:23:34
管理现代化(2016年6期)2016-01-23 02:10:59
制造业自动化(2015年8期)2015-10-30 07:20:10
汽车科技(2015年1期)2015-02-28 12:14:37
