
单片机控制的独立立柱式X射线机运动控制系统
2010-01-31 04:17马民花
中国医学装备 2010年7期
马民花
目前,医疗机构用于大功率的透视和摄影的X射线设备,通常是体积比较庞大的拍片机、胃肠机或透视机,占用空间比较大,外形也显得比较笨重。本文介绍一种占用空间小、由单片机控制、用三个独立立柱组成的X射线机运动控制系统,在有限空间范围内,实现5.0~50 kW 功率范围的X射线的透视、摄影功能。该系统具有结构紧凑、体积小巧、操作方便等特点,可用于医疗机构或车载X射线机的常规X射线透视、摄影的机械运动支撑、控制。

图1 系统组成示意图
1 系统组成示意图(如图1所示)
该X射线机运动控制系统由三个独立的立柱组成,三个立柱呈三角位置关系固定,每个立柱上有可上下运动的驱动装置。立柱分别用于支撑和控制X射线机球管、X射线影像增强器、X射线片盒夹的上下运动,按三个立柱所支撑控制的X射线组件不同,分别简称为球管立柱、增强器立柱、片盒立柱。
根据X射线透视和摄影成像要求,球管焦点到X射线影像增强器的焦屏距为1.0 m, 球管焦点到X射线片盒夹的焦屏距为1.8 m。故此,三根立柱即可安装在2 m2的范围内。由于每个立柱高度位1.8 m,立柱升降范围为500~1 500 mm,同步跟踪精度为8 mm,所以,可满足正常人体从下肢、腹部到颈部透视、摄影位移范围的要求。
2 控制原理
系统以球管立柱为主控立柱,可手动控制球管的升降运动,在透视模式时球管出线口对准增强器中心位置,在摄影模式时球管出线口对准片盒夹中心位置。主控立柱单片机实时采样球管运动状态和位置信号,并将位置信号及升降状态发送给从立柱单片机。
增强器立柱(对应透视模式)和片盒立柱(对应摄影模式)为从立柱,在透视模式时系统对增强器位置自动进行同步跟踪,摄影模式时系统对片盒位置自动进行同步跟踪。
系统以485的通讯方式进行立柱运动控制电路之间的通讯。每个立柱上装有立柱控制电路。系统上电后,单片机判断所控立柱为主控立柱还是从立柱。为主控立柱时,等待手动升降操作,并对当前球管位置信号进行采样,A/D转换后,通过485接口将升降状态和球管位置信号发送给从立柱。立柱为从立柱时,单片机判断当前工作模式是否为本立柱所属的工作模式,若为透视模式,增强器立柱单片机采样增强器位置信号,并与主控立柱单片机发送的球管位置信号进行比较,决定是上升或下降及上升下降的距离,同时对球管位置进行实时跟踪;若为摄影模式,片盒立柱单片机的工作原理与透视模式下增强器立柱单片机的工作原理相同,以此保证增强器位置和片盒位置在透视和摄影工作模式时与球管位置的同步,来完成X射线机的透视和摄影工作。
三个立柱运动控制电路设计完全相同,只是通过开关编码设置,识别主从状态和立柱所属的透视或摄影工作模式状态。每个立柱控制电路原理框图,如图2所示。
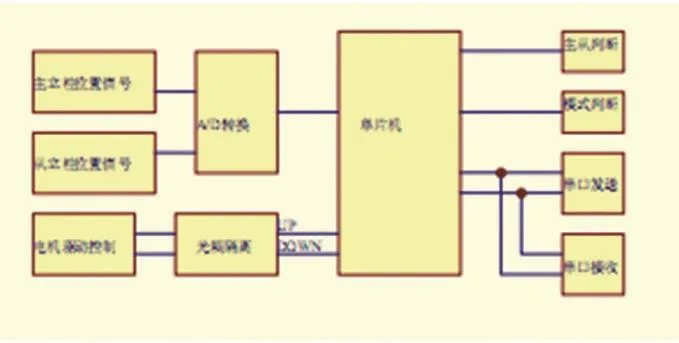
图2 控制系统原理组成框图
控制系统以80C51单片机为核心,由位置采样及A/D转换电路、串口485通讯电路、手动/自动升降控制、驱动电路、主从判断、工作模式判断电路等组成。立柱控制原理图,如图3所示。
3 主要功能控制电路
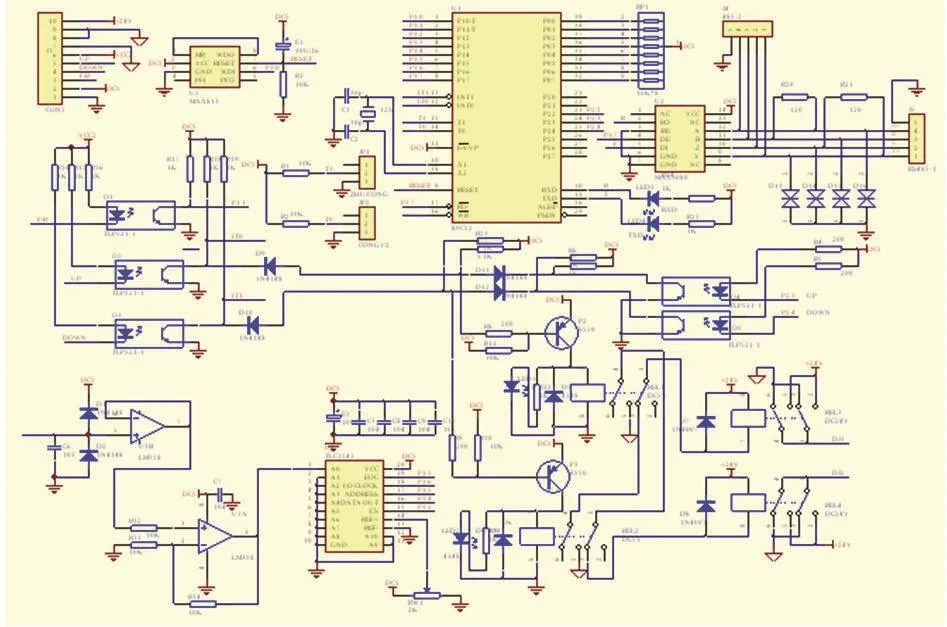
图3 立柱运动控制原理图
3.1 单片机控制电路
单片机控制电路选用通用主流的8位的80C51单片机系列微控制器,除单片机基本功能电路外,还有看门狗电路、声光报警电路、状态指示电路等功能电路。
3.2 A/D转换电路(如图4所示)

图4 位置信号采样的A/D原理示意图
A/D转换电路选用串行接口10位的逐次逼近式A/D转换器,与单片机接口简单,外围器件少,占用资源少。
X射线组件位置信号通过与升降驱动齿轮联动的多圈高精度电位器进行取样(图4中虚线所框部分),射随隔离后,进行放大。考虑到驱动机构运动低端、高端位置的限制,以及在1 000 mm的上下运动范围内控制精度为3 mm,故限定放大器输出电压为0~3.75 V,之后,将放大的电压进行A/D转换。在实际使用中,主从立柱的跟踪位置在8 mm的误差范围内即可满足成像要求。
采样信号的输入端分别用二极管连接到电源和地端,使作用于运放输入端的电压限制在电源电压和地之间,对运放输入端进行过压保护。
3.3 485通讯原理(如图5所示)

图5 485通讯原理示意图
485通讯电路选用双向全双工通讯模式,并有发送、接收指示灯,可随时监测通讯工作模式状态,在四个差分接收和发送端分别对地接有4个双向瞬态拟制器,对传输线上的干扰进行过压保护。瞬态抑制器具有响应时间快、漏电流低、体积小、瞬态功率大等优点。传输线没有干扰正常工作时,瞬态抑制器处于高阻状态,不影响信号传输,当传输线上有反向瞬态高能量冲击时,瞬态抑制器能以10-12秒级的速度变为低阻状态,吸收浪涌功率,将电压箝位于预定值,对电路进行有效保护。同时,因三个立柱之间总距离在5 m之内,系统通讯完全能可靠、稳定工作。
3.4 电机控制电路(如图6所示)

图6 电机控制原理示意图
立柱的电机选用24 V,3 A的直流电机。控制简单,工作可靠,成本低廉。为提高系统的抗干扰能力,电机驱动电路与单片机控制电路通过光耦进行隔离,避免驱动电路发生故障时,对单片机电路的损坏。
在图6电路中,有上升、下降两路控制驱动电路。当P2.3为“1”时,光耦不导通,P2三极管截至,一级驱动继电器REL1不导通,二级驱动继电器REL3导通回路断开,电机输出电压DJ1为0 V;当P2.3为“0”时,光耦导通,P2三极管导通,一级驱动继电器REL1导通,二级驱动继电器REL3导通回路接通,电机输出电压DJ1为24 V。所以,当需要上升时,P2.3为“1”,P2.4为“0”,DJ1、DJ2两端输出+24 V电压,电机正转,支撑驱动机构上升;当需要下降时,P2.3为“0”,P2.4为“1”,DJ1、DJ2两端输出-24 V电压,电机反转,支撑驱动机构下降。
电路中,为了电机可靠工作,用两级继电器进行驱动控制,并在第一级继电器驱动时加入了互锁功能,保证只有上或下一路信号有效时,电机两端有DC24 V电压输入,当因误操作使上或下两路控制信号同时有效时,电机两端电压输入为0 V,电路从硬件方面保证了电机的工作可靠性和安全性。
升降控制电路同时能满足手动、自动控制升降的要求。控制电路为主控电路时,手动升降起作用,单片机读取升降状态,并屏蔽自动升降控制信号;控制电路为从控电路时,断开手动控制电路,升降操作由单片机直接控制。
4 系统工作流程
软件由信号处理程序、信号输出控制程序、通讯程序等组成。
信号处理程序,主要是对位置信号的读取和跟踪。读取位置信号时,为防止干扰,连续读取3次位置信号,当三次取值相同时,认为信号位置稳定。从立柱进行跟踪时,按位置差值决定跟踪速度,当主从位置相差较大时,进行快跟踪;跟踪位置差值较小时,进行慢跟踪。同时为防止从立柱频繁跟踪操作,设立跟踪位置门限。软件采取多种抗干扰措施,提高系统工作的稳定可靠性,消除由干扰引起的误操作。
立柱运动控制软件工作流程,如图7所示。
5 结语
文章介绍的单片机控制的独立立柱式X射线机运动控制系统,灵巧、简洁、紧凑,安装方便,性价比高,控制精确,系统稳定可靠,已用在车载X射线机的运动控制系统上。

图7 立柱软件控制流程框图
[1]潘新民,王燕芳.单片微型计算机实用系统设计[M].北京∶人民邮电出版社,1993.
[2]王瑞玉. 医用移动式数字X射线机原理构造和维修[M].北京∶中国医药科技出版社,2004.
[3]陈建明. 电子线路中的EMC标准与EMC设计[J].单片机与嵌入式系统应用,2008,3(12).
[4]马民华. 一种独立立柱式X线机[S].中国,200620135868[H05G/G03B].2007-09-19.
[5]周志敏.瞬态干扰抑制技术及器件[J].控制系统,2003(12).
[6]常小晶,瞬态脉冲干扰抑制和浪涌防护器件[J].机床电器,2009(6).
[7]赵世英.医用X线机结构及维修课程改革实践[J]. 右江医学, 2002(2).
[8]严景恩, 龚水根, 张伟国. 放射科医疗设备的维护和保养[J]. 第三军医大学学报,2003(19).
[9]王官,赵国斌,苗文贵,等.移动X线机遥控曝光系统的设计[J].中国医学装备,2009,6(7)∶25.
猜你喜欢
中国设备工程(2022年14期)2023-01-02
中老年保健(2021年8期)2021-08-24
汽车维护与修理(2019年3期)2019-08-08
记者观察(2019年1期)2019-04-04
汽车维护与修理(2018年5期)2018-09-29
中国医学装备(2018年7期)2018-07-12
汽车维护与修理(2018年23期)2018-07-03
汽车维护与修理(2017年5期)2017-11-17
中国医药指南(2017年13期)2017-01-16
装备制造技术(2016年5期)2016-09-10
