
模糊控制在跳汰选矿中的应用
2010-01-22 12:48刘志红黄宋魏
中国矿业 2010年11期
秦 虎,刘志红,黄宋魏
(1.贵州大学 矿业学院,贵州 贵阳 550003; 2.贵州非金属矿产资源综合利用重点实验室,贵州 贵阳 550003;3.昆明理工大学 国土资源学院,云南 昆明 650093)
跳汰机作为传统选煤行业中的最主要设备,其控制效果的好坏,直接影响到产品的质量。而在这其中,床层厚度及风阀系统的控制是最关键的部分。目前,大部分企业还是采用人工根据经验来对风量的大小、床层厚度进行调整,其控制指标受到人为因素的影响很大,这样不仅会造成控制不精确而造成指标不稳的现象,还增加了工人的劳动强度。尽管现在已有不少企业采用了自动化来对跳汰过程进行控制,但大部分是采用传统的PID[1]控制。由于跳汰机的控制是一个很复杂的控制过程,存在多变量、强耦合且极具有大非线性的特点,使传统的PID控制效果比较差。现在,有的学者针对跳汰给料对跳汰分选过程进行了模糊PID自整定控制,如太原理工大学的姜金林[2]等。本文针对跳汰过程具有极大非线性及存在多变量耦合的特点,提出了一种基于模糊控制的控制方案来对分选过程进行控制。由于模糊控制不需要知道被控对象的精确的数学模型,它是用语言变量来描述系统特征,并依据系统的动态信息和模糊控制规则进行推理,以获得合适的控制量, 因而具有较强的鲁棒性,但其存在静态误差,而传统的PID控制能很好的克服模糊控制的这个缺点。因此,本文提出了用模糊PID控制来对床层厚度及风阀进行控制。
1 跳汰选矿的原理
跳汰选矿按照所用介质的不同,可以分为风力跳汰及水力跳汰两大类。但本文只针对目前生产实际中应用较多的水力跳汰进行研究。其基本原理是[3]:先将被选物料给到跳汰机筛板上,形成一个密集的物料层,这个就叫床层。与此同时,从跳汰机的下部透过筛板,周期地给入一个上下交变水流,物料在水流作用下进行分选。首先,在上升水流的作用下,床层逐渐松散、悬浮,这时就按床层本身的特性(矿粒的密度、粒度和形状)彼此相对运动进行分层。上升水流结束后,在休止期间(停止给如压缩空气)以及下降水流期间,床层逐渐紧密,并继续进行分层。待全部颗粒都沉降到筛面上以后,床层又恢复了紧密状态,这时大部分矿粒彼此间已失去了相对运动的可能性,分层作用几乎停止。只有那些极细的颗粒,可以通过床层的缝隙继续向下运动,并继续分层。下降水流结束后,分层暂告终止,至此完成一个跳汰周期的分层过程。物料在每一个周期中,都只能受到一定的分选作用,经过多次重复后,分层逐渐完善。最后,密度低的矿粒集中在最上层,密度高的矿粒集中在最底层,经排矿排出,分别得到精矿、矸石、尾矿。
2 影响跳汰分选的主要因素
影响跳汰过程的因素很多,主要有物料性质、机械结构、操作因素三大类[3]。对于一定的物料和跳汰机,确定合理的操作制度是获得良好分选效果的保证。具体来说,有以下几个方面:
2.1 跳汰机的给料
跳汰机的入料性质的波动及给料量的变化,对跳汰机的工艺效果都有直接的影响。因此,必须保持给料速度的均匀,尽量使入料量的性质变化波动尽量小。
2.2 跳汰频率和周期
跳汰频率和周期都是跳汰过程的重要参数。跳汰脉动水流的振幅决定了床层在上冲期间扬起的高度和跳汰床层的松散条件。频率的调整只能通过改变风阀的转速来调整。振幅则主要通过改变风压、风量、风阀的进、排气孔面积及频率等加以控制。
2.3 风量和水量
风量和水量的正确配合使用对分选过程极为重要。虽然在一定范围内增加风量或增加筛下补充水,都能提高床层松散度,但增加风量能提高下浆期的吸啜作用,而增加水量却是减弱它的作用。在实际操作中,主要是凭具体情况及工人的操作经验来灵活运用的。
2.4 床层状态
床层的运动状态决定着矿粒按密度分层的效果,所以操作的主要目的,是为了使床层处于有利于分选的工作状态,并使之保持稳定。床层愈厚,床层松散所需的时间也愈长。若床层太厚,在风压或风量不足的情况下,不容易达到要求的松散度。
2.5 产物的排放与分离
按密度分好层次的床层,应及时、连续、合理地排出跳汰机。应该使重产物的排放速度与床层分层速度、矸石床层的水平移动速度相适应。如果重产物出不及时,产生堆积,将污染精矿,影响精矿质量;如果重产物排得太快,又会出现矸石床层过薄,甚至排空情况,使整个床层不稳定,从而破坏分层,增加精矿的损失。
3 模糊-PID控制器的设计
3.1 模糊控制器的基本结构
模糊控制对参数难以精确表达的物理对象特别适用[4]。模糊控制系统的组成,主要由模糊控制器和控制对象所构成,如图1所示。
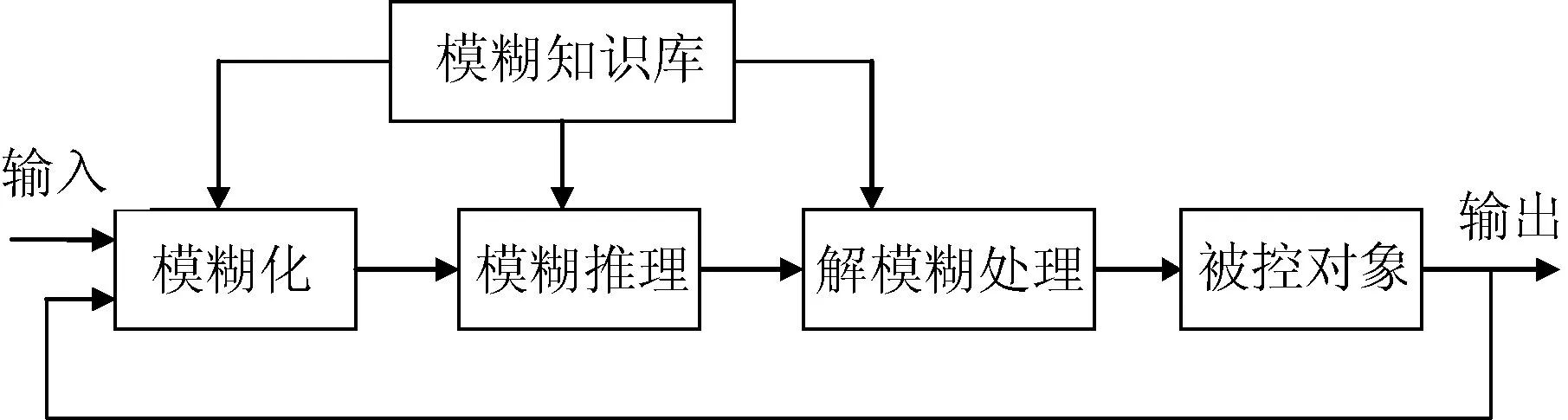
图1 模糊控制器框图
模糊控制器主要包括四个部分[5],分别是模糊化、模糊规则库、模糊推理及解模糊处理。
模糊化处理。模糊化的作用是将输入的精确量转换成模糊量,其输入量包括外界的参考输入、系统的输出或状态等。
模糊知识库。规则库中包含了具体应用领域中的知识和要求的控制目标。里面主要包含了各种语言变量的隶属度函数、尺度变换因子及模糊空间的分级数和用模糊语言变量表示的一系列控制规则。
模糊推理。模糊推理是模糊控制的核心,它具有模拟人的基于模糊概念的推理能力。该推理过程,是基于模糊逻辑中的蕴涵关系及推理规则来进行的。
解模糊处理。解模糊的作用是将模糊推理得到的控制量(模糊量)变换为实际用于控制的清晰量。
3.2 模糊-PID控制器的结构
在跳汰机的控制中,将床层厚度的偏差及偏差变化率作为模糊控制器的输入变量,输出变量为PID控制器的3个参数,即比例系数Kp、积分系数Ki、微分系数Kd,进而是床层厚度达到设定值。
精确输入量的模糊化。输入量的模糊化首先要确定输入量的基本论域,选床层厚度的偏差E及偏差变化率EC作为模糊控制器的输入变量,以比例系数、积分系数、微分系数为输出变量,定义其模糊量的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。其中:NB,NM,NS,ZO,PS,PM,PB分别表示负大、负中、负小、零、正小、正中和正大。根据论域的覆盖程度及灵敏度、稳定性与鲁棒性原则,因此,隶属度函数均选取三角形函数[4]。它们的变量、基本论域、模糊论域及量化因子分别如表1所示。
模糊规则及模糊推理。根据模糊参数表,利用模糊规则进行模糊推理,其中,Kp、Ki、Kd的模糊规则表分别见表2、表3、表4所示。

表1 模糊参数表

表2 Kp的模糊规则表

表3 Ki的模糊规则表

表4 Kd的模糊规则表
在控制系统运行过程中,系统通过对模糊规则的结果处理、查表和运算,完成对PID参数的在线自校正,从而使系统实现更加精确、合理的控制。
4 系统仿真分析
假定系统的传递函数为:
G(s)=523500/(s^3+87.35s^2+10470)
分别对其进行单独PID控制及模糊PID控制,并在某一时刻内加入一个干扰,来比较两种控制方法优劣性。仿真结果分别如图2、图3所示。
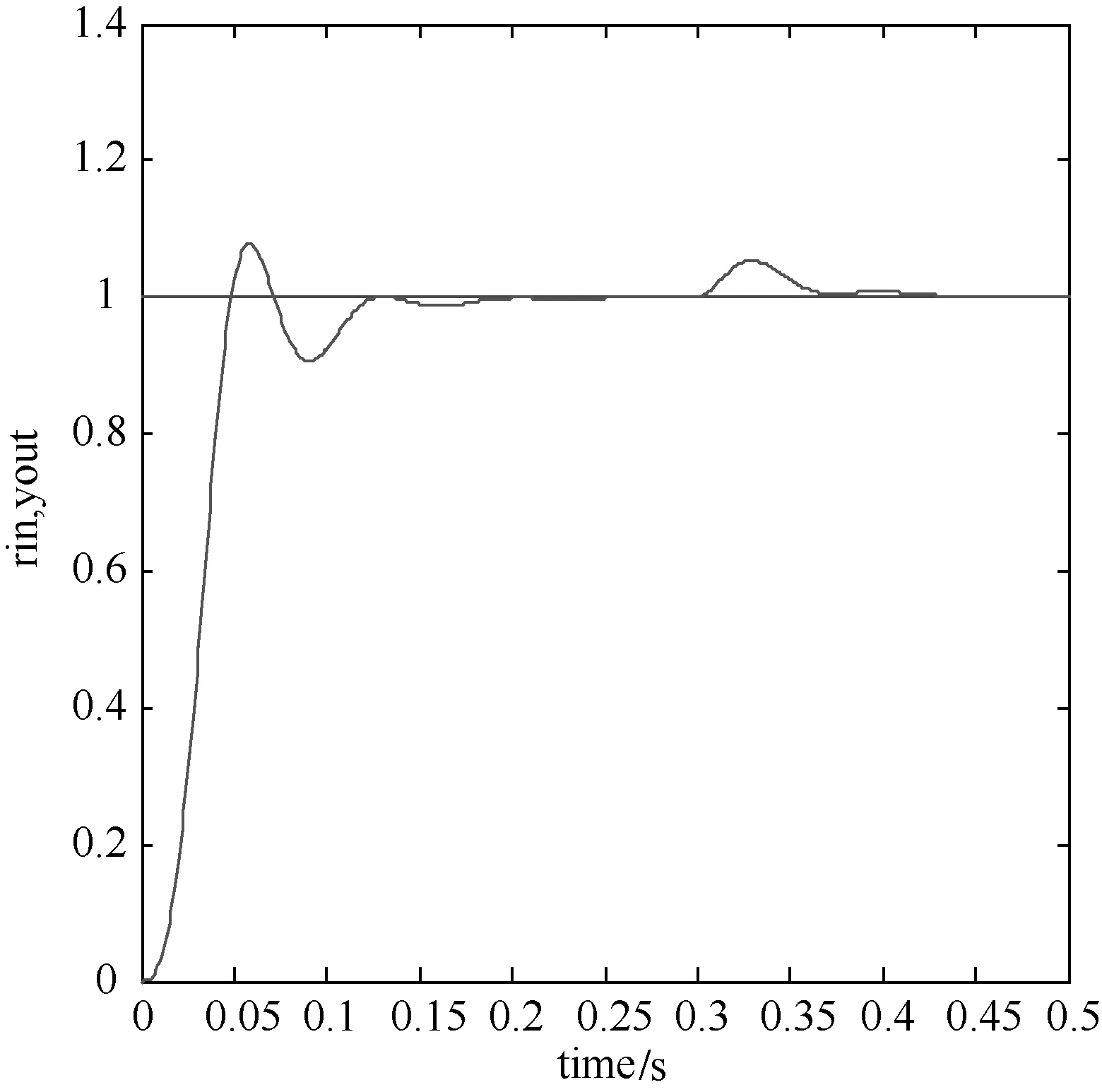
图2 模糊PID控制仿真图
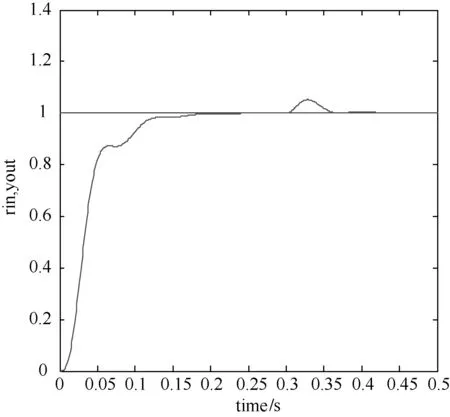
图3 传统PID控制
在图2、图3中,横坐标表示仿真时间,纵坐标表示系统的输入与输出。由图2、图3中可以看出,使用模糊PID控制,在响应时间上要优于传统PID控制。并且可以看出,使用模糊PID控制比使用传统PID控制的鲁棒性更强。
5 结语
该控制系统是在传统PID控制的基础上加以改进,引入了动态的、移植性很强的模糊控制系统,起到了在线自调整的作用,从而排除了人为控制的主观性,达到了节能降耗的目的。通过仿真结果可以看出,在响应速度及鲁棒性方面,模糊PID控制比传统PID控制更好。在跳汰机上,采用模糊PID控制是非常理想的。同时,该控制系统也可以应用于对控制精度和反应速度要求比较高的其他设备上。
[1] 符东旭.跳汰机自动控制的途径[J].煤矿自动化.1998,1(1):21-23.
[2] 姜金林.模糊自整定PID控制在跳汰机给煤控制中的应用[J].太原科技,2009,2(3):85.
[3] 谢广元.选矿学[M].徐州:中国矿业大学出版社,2001:192,229-232.
[4] 李明东,范德日,徐佩利,等.红矿磨选中旋流器自动控制系统的设计[J].矿业快报,2006,12(12):23.
[5] 李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2007:212-213.
[6] 胡汉辉,谭青. 磁悬浮平台的解耦模糊PID控制[J]. 中南大学学报:自然科学版,2009,8(4):965.
猜你喜欢
东北林业大学学报(2022年12期)2022-12-28
厦门大学学报(自然科学版)(2022年4期)2022-07-15
中南大学学报(自然科学版)(2021年12期)2022-01-26
成都信息工程大学学报(2021年6期)2021-02-12
现代装饰(2020年7期)2020-07-27
电子制作(2019年16期)2019-09-27
兵工学报(2019年6期)2019-08-06
中南林业科技大学学报(2018年12期)2018-04-08
商(2016年28期)2016-10-27
电子制作(2016年21期)2016-05-17
