
分布式小卫星系统的技术发展与应用前景
2010-01-08 08:31林来兴
航天器工程 2010年1期
林来兴
(北京控制工程研究所,北京 100190)
1 引言
现代小卫星问世至今已有20 多年的历史。实践证明小卫星具有一系列优点,同时也存在一些局限性。为了使小卫星的优点得到充分发挥,又能克服缺点,在应用方面采用分布式配置应是最佳的解决办法。20 世纪90年代,分布式小卫星系统主要应用在星座与星群的领域。本世纪初,开发出了小卫星编队飞行方式,使分布式小卫星系统得到进一步的发展。
分布式航天器系统(也称分布式空间系统)是当前空间技术应用领域的一个重要研究课题。本文中所涉及的是分布式航天器系统中的航天器专指小卫星(或者轻小型航天器)。分布式即表明需要采用数量较多的航天器。现代小卫星具有重量轻、成本低、研制周期短等技术特点,这正是采用分布式系统的物质基础和必需条件。分布式小卫星系统具有极大优势和广泛的应用前景。
2 小卫星的特点
20 世纪80年代中期,国际上采用新技术和新设计思路,兴起了小卫星热,20 多年来,全世界共发射各种各样的小卫星近900 颗,约占同期航天器发射量的20%。小卫星经过20 多年的快速发展,在技术上获得了巨大进步,在应用上正在向全方位扩展[1]。
小卫星有如下优点:
1)重量轻(1 千克~几百千克);
2)体积小,成本低;
3)研制周期短(1~2年,甚至几个月),技术更新快;
4)性能好(功能密度高),能够及时应用新技术;
5)快速灵活,机动性好;
6)能提供更多进入空间的机会,特别有利于发展中的国家;
7)便于进行教育培训和空间演示试验。
小卫星也存在下列缺点:
1)单颗小卫星有效载荷重量和功率有限;
2)对单点故障敏感;
3)短期运行寿命和高风险;
4)难以找到廉价可靠的发射工具(相对大卫星每千克发射费用高而言)。
如何发挥以上优点克服缺点? 在应用上采用分布式空间系统,小卫星就具有巨大发展潜力和应用前景。分布式空间系统有如下优势:
1)单颗大卫星功能可由若干颗小卫星来替代,还可以获得更好的技术性能;
2)可以实现全球实时观测;
3)可提供甚长测量基线,从而促进下列领域的发展,例如:星载干涉仪,全球遥感,同步目标跟踪观测等;
4)编队飞行卫星可以随时加入和退出队列(因故障等原因),系统具有很高的重构性、冗余性、安全可靠性;
5)系统技术性能可以定期获得改善和提高;
6)系统偶然性经费很低,也就是说,消除故障所用费用会很少。
3 分布式小卫星系统的概念
分布式小卫星系统是由分布式空间系统或者分布式航天器系统派生出来的一个分支。它的定义是:由两颗或两颗以上的小卫星按一定要求分布在一种或多种轨道上,共同协调合作完成某些空间飞行任务(例如:观察、测量、通信、导航等),从而获得更大价值。
从单颗小卫星发展成为分布式小卫星系统,这是小卫星在技术和应用方面的一个崭新领域,具有创造性和很好的发展前景。
根据星间距离的大小,位置控制精度的差异、技术水平的高低和应用层次的不同,分布式小卫星系统分为下列三个方面:1)星群;2)星座;3)编队飞行。有关星群、星座和编队飞行的概念参阅文献[2]。编队飞行有三种方式:合作编队、知识编队、精确编队,其技术水平和难度依次提高。
4 分布式小卫星系统技术发展水平
现代小卫星应用到分布式系统的星群和星座从20 世纪90年代就开始了。但是真正意义上的分布式小卫星系统应是小卫星编队飞行。当今,小卫星编队飞行正处在研究探讨和空间飞行演示验证阶段,真正应用还没有开始。下面从应用实例来说明分布式小卫星系统技术发展水平。
图1 列出了美国20年来一些典型应用实例[3],图2 列出了非美国(主要是欧洲)等20年来一些典型应用实例[3]。这些图片比较形象地描述了分布式小卫星系统在各方面应用的概况。图1 和图2 有关小卫星编队飞行各种具体型号任务内容见表1。
因为上述要求测量和控制的精度太高,而且使用编队飞行航天器个数多,技术难度大,对表1 所列的任务规划,只能作概念和粗略了解。图3 列出了欧洲分布式小卫星系统的一些典型任务,其中包括任务名称、分布式规模和轨道位置控制精度要求。美国分布式小卫星系统的技术要求随着时间推移不断提高,如图4 所示。

图1 美国分布式空间系统任务Fig.1 U.S.distributed space missions

图2 非美国(主要是欧洲)分布式空间系统任务Fig.2 Non-U.S.(ESA)distributed space missions

表1 小卫星编队飞行技术性能汇编[4-13]Table 1 Collection of the technical performance of small satellite formation flying

续表1
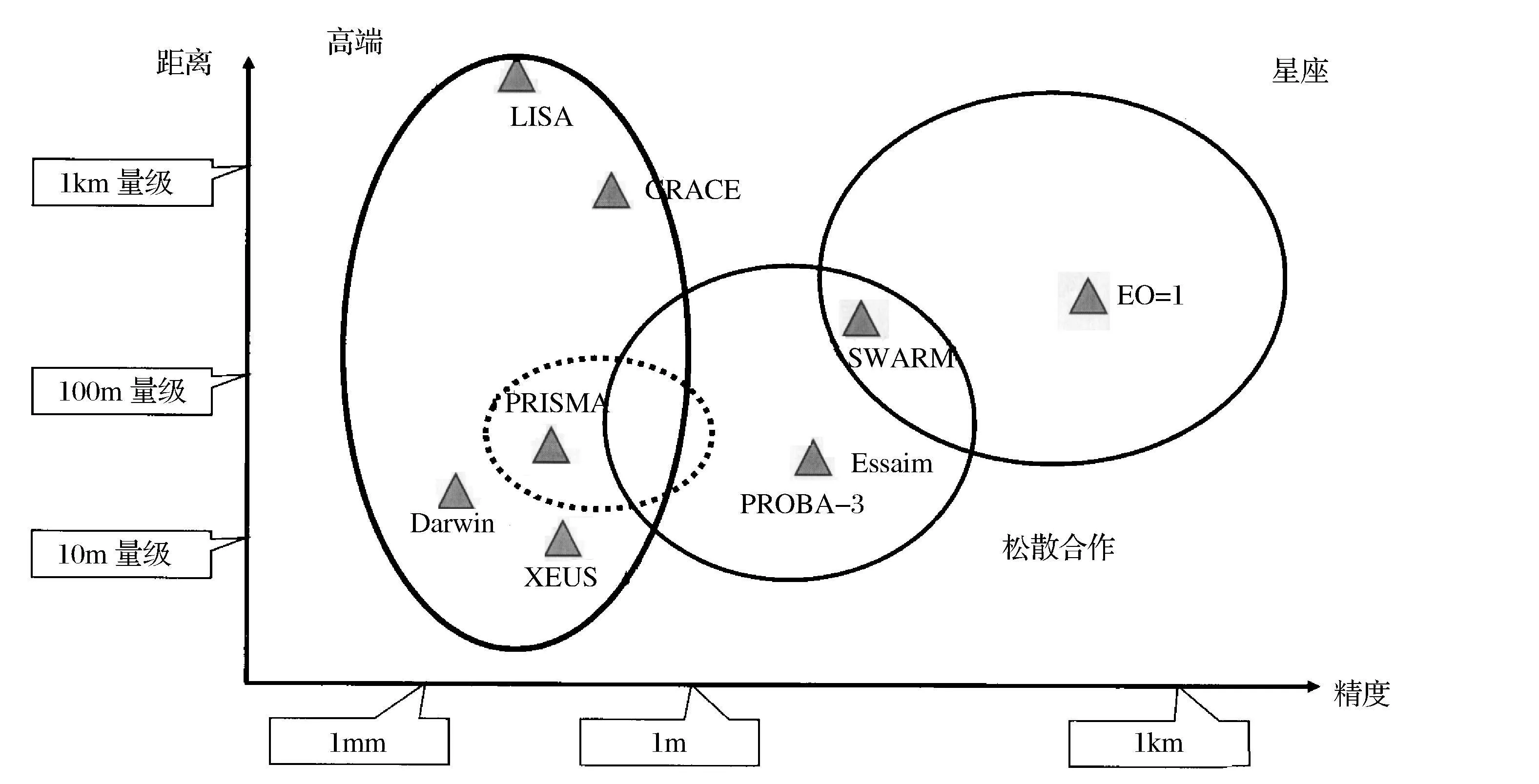
图3 欧洲等国家分布式小卫星系统的规模和轨道位置控制精度要求Fig.3 Distribution size and orbit control precision of ESA distributed small satellite system

图4 美国分布式小卫星系统技术要求水平不断提高Fig.4 The level of technical requirements for DSSS are continuously improved
5 分布式小卫星系统关键技术和编队飞行的应用前景
5.1 关键技术
分布式小卫星系统关键技术包括两部分:小卫星技术和编队飞行。
1)小卫星关键技术
小卫星技术关键在于提高小卫星功能密集度。所谓功能密集度是指单位重量小卫星所能提供的功能。如果功能密集度高,说明小卫星重量轻且提供功能水平高。小卫星功能密集度具体包括两方面内容:一方面是小卫星本身的技术,另一方面是小卫星有效载荷与小卫星的质量比。小卫星本身技术功能密集度体现在组成小卫星各个分系统和部件的密集度,例如:星上电源分系统功能密集度表现在单位质量提供的功率和安时数;控制系统表现在单位质量能提供的控制精度;推进分系统表现在单位质量能提供的速度增量(Δv),星上计算机(包含电子元器件)表现为单位质量所能提供单位时间操作指令数等等。
有效载荷与小卫星的质量比, 目前一般都在30%~40%左右,未来要求逐步提高到60%~70%以上。未来100~200kg 的小卫星将可以承担许多空间飞行任务。功能密集度高的小卫星对整个分布式小卫星系统将产生重要影响,首先能降低发射费用,还会大大扩展分布式小卫星系统应用范围,具有良好的应用前景。
2)编队飞行关键技术
(1)编队飞行设计
设计一个编队飞行轨道的构型,既要能满足科学任务需要,又要在工程实践中消耗燃料合理且经济,在工程上可以实现。此燃料消耗是指,包括编队飞行设计,初始编队飞行轨道构型建立,以及后来长期运行时航天器受到轨道摄动所需要保持编队构型的燃耗。要深入研究相对轨道动力学和相对摄动以及各种可能形成的编队飞行构型。在深空和日地关系中拉格朗日点附近,相对轨道摄动很低,目前已经有若干编队飞行空间任务和编队轨道构型在进行开发研究,并计划不久的将来进行空间飞行演示。编队飞行空间探测任务的完成将会带来重大科学创新和技术效益。
在地球轨道,特别是低轨道的编队构型,由于轨道摄动,保持严格的队形等,需要大量燃耗,目前正在探索地球轨道编队飞行新的控制方法与技术,尚处在研究阶段。
(2)相对导航
相对导航指测量和估算编队各星之间的相对位置、速度和姿态,包括测量方法、敏感器、测量系统,以及空间各种干扰对敏感器测量精度的影响。
自主编队队形保持(闭路)控制,尤其是紧密型编队构型,对相对导航技术要求很高,而且对敏感器动态性能也有严格要求。
编队飞行相对导航技术,目前采用的有相对GPS、激光雷达和微波测距等技术。由于编队飞行任务还处在发展阶段,对编队相对导航技术还有许多特殊要求,应该作为一个重要专题开展研究。
(3)星间通信
星间通信指编队飞行的各个航天器之间的信息直接传输与交换技术。由于许多编队飞行队形状态与控制要求的频带很宽,通过地面测量与控制不能满足任务要求,精密编队飞行需要采用自主控制技术。
星间通信系统是编队飞行数据总线,比其他的星上数据总线要求更高。例如需要具备连续性、抗干扰性、鲁棒性。另外,由于都是星上设备,要求质量轻、功率低。
星间通信技术包括硬件(发射器和转发器)、算法、网络结构和软件,要求硬软件一体化,便于使用和安装。
星间通信发展趋势是采用激光通信。目前星间激光通信技术已经开始在空间轨道上进行演示验证。
(4)编队控制
编队控制主要任务是克服各种干扰与轨道摄动,保持编队队形。编队控制使用手段是控制力和力矩,编队控制需要6 个自由度:三维轨道位置与三轴姿态,而且这些自由度经常耦合,难以用解耦方法分开解决。由多颗航天器组成的编队飞行可以认为是一个真正多变量复杂系统。编队控制首先要从系统级顶层规划控制策略,然后才具体设计控制系统技术。
不同的编队飞行类型对编队控制的要求有所差别。精密编队控制要求最高,不但精度高而且自主强(全自主),不能依赖地面站。知识编队控制主要要求在相对导航,要求时时刻刻精确测量和估算编队队形变化,而对编队队形保持没有严格要求,允许其在较大范围内变化。
5.2 小卫星编队飞行的应用前景
分布式小卫星系统的最大特点是分布式,在20世纪末已被许多空间飞行任务所验证(星座与星群)。本世纪初在空间应用领域又创造性地开发了小卫星编队飞行。
小卫星编队飞行应用前景:
1)预计今后10~15年期间,在空间遥测(光学与微波)方面将发生重大技术革命,这是由于分布式系统测量基线可以极大延伸,从而使干涉技术得到充分应用,空间遥感测量精度将提高1~2 个数量级。
2)在深空探测和日地关系研究方面,编队飞行可以观测到以前观测不到的物理现象和天文数据,可以实现开创性空间探测,例如研究黑洞,宇宙演化,生命起源等,将使空间天文学提升到一个新水平。
3)对地球轨道空间飞行任务,由初期分布式(星群与星座)小卫星系统水平,提升到编队飞行这样高级的分布式系统,使电子侦察卫星、通信导航卫星技术性能得以改善和提高,例如文献[5]所述研究结果:当电子侦察卫星由星座改为编队飞行,三维定向系统精度将得到较大提高,同时观测地区不受纬度限制,而且可以实现全球同时观测。
4)从编队飞行发展到美国最近提出的F6 计划。这个计划彻底改变几十年来的传统方法:未来航天器将由功能分解、结构分离、无线连接的标准化模块的部件,以编队飞行方式快捷灵活地组合,航天器设计与制造全部实现标准化、模块化。不像目前每项空间飞行任务都要单独进行设计与研制,这样使航天产品像其他工业部门一样实现企业化生产。
6 结束语
对于分布式小卫星系统,首要任务是开发小卫星和编队飞行技术,以获得最佳效益。小卫星编队飞行目前较多集中在对深空探测领域的研究,随着空间飞行演示的成功和技术经验的不断积累,以后将逐步应用于地球轨道。
)
[1]林来兴.小卫星技术发展和应用前景[J].航天器工程,2006, 16(6)
[2]林来兴.分布式空间系统和航天器编队飞行辨析[J].航天器工程,2008, 17(4)
[3]Scharf D P. Future technology directions -precision formation flying mission and technologies[R].NASA JPL Tech Paper, 2008
[4]Leitner J.Spacecraft formation flying ——An overview of mission and technology challenges[C].AAS07-031,2007
[5]林来兴.小卫星技术发展和应用前景[J].航天器工程,2006(4)
[6]Schart D P.Future technology directions precision formation flying mission and technologies[R].NASA JPL Tech Paper, 2008
[7]Steven H D, Rodden J, M orten P, et al.Validating a formation flying control system design the GRACE project experience[C].ASS OO-O14,2000
[8]Horan S, et al.Three corner sat constellation[C].SSC99-4-7, preceeding of 13thAIAA/usu conference on Small Satellites, 1999
[9]Deininger W D, Noecker M C, Wiemer D J, et al.Space technology-3:Mission overview and spacecraft concept description[J].Acta Astronautica, 2003(52),455-465
[10]Aung M, Ahmed A, Wette M, et al.An overview of formation flying techology development for TPF mission[C].2004 IEEE Aerospace Conf Proc:2667-2679
[11]Barnhart D J, Vladimirova T, Sweeting M N, et al.Very-small-satellite design fordistributed space mission[J].Spacecraf t and Rockets, 2007,44(6)
[12]林来兴.编队飞行卫星三位定位系统的动力学和控制策略[J].航天控制, 2008,26(3)
猜你喜欢
国际太空(2022年7期)2022-08-16
兵器装备工程学报(2020年11期)2020-12-16
华东师范大学学报(自然科学版)(2020年4期)2020-08-04
弹道学报(2020年2期)2020-07-06
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
电脑知识与技术(2018年27期)2018-12-18
国际太空(2018年9期)2018-10-18
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
