
三相SPWM控制器的研究设计
2009-05-25 09:01叶云云
中国教育技术装备 2009年9期
叶云云
摘要 对SPWM的原理及其控制集成电路的各个模块进行分析和研究,给出单芯片三相SPWM恒压频比变频器的实现。最后利用Altera的QuartusⅡ软件对该设计进行编译和仿真,并给出仿真结果。
关键词 脉宽调制;SPWM;FPGA
中图分类号:TM301.2 文献标识码:A 文章编号:1671-489X(2009)09-0070-02
Design and Studied of 3-phase Sinusoidal PWM Controllor//Ye Yunyun
Abstract This paper mainly deals with the realization of the 3-phase sinusoidal PWM (SPWM) controller with constant U/f ratio is proposed. Simulation results are given at the end of this article to verify the constructed controller.
Key words PWM;SPWM;FPGA
Authors address Qingdao University of Science & Technology, Qingdao, Shandong 266061
正弦波脉宽调制(SPWM)法是从三相交流电动机供电电源的角度出发的一种控制方法。用硬件电路实现SPWM法,通常是用一个正弦波信号发生器产生可以调频调幅的正弦波(称为调制波)信号,再用一个三角波信号发生器产生幅值不变的三角波(称为载波)信号,将它们进行比较,由两者的交点来确定逆变器开关的转换[1]。
1 三相SPWM控制器设计
1.1系统结构分析如图1所示,该系统可以分为5个部分:分频器单元、载波比选择单元、译码器单元、存储器单元和死区调节单元。
1.2 SPWM模块化研究前面介绍了SPWM系统的总体框图,下面对系统的各个组成模块进行详细地说明。
1)分频器模块(图2)。由于整个输出频率范围分为8个载波比区段,在每个载波比区段,需要知道等脉宽载波的频率,以便利用它来控制相应计数器,并得到相应的δ值,从而得到需要的调制波形[2]。
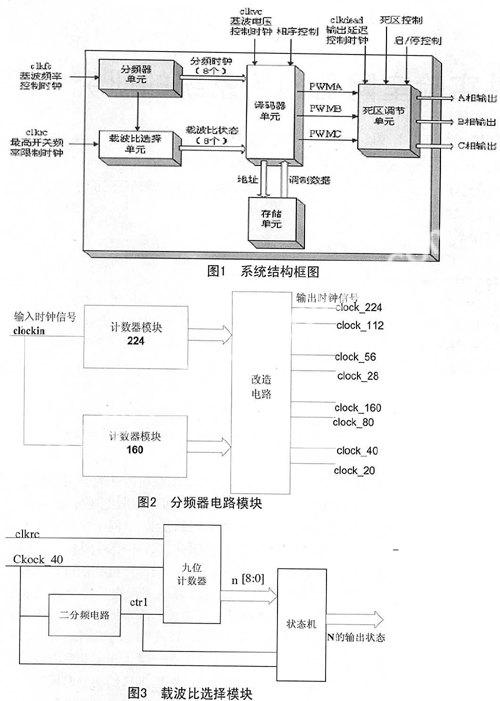
2)载波比选择模块(图3)。分频器的输出时钟端40脚将作为参考频率,通过统计40脚的一个时钟周期内clkrc的脉冲数,根据clkrc脉冲数量利用有限状态机(FSM)判断出ƒ所在的载波区段。为了方便起见,只需统计clock_40一个周期内高电平期间clkrc脉冲个数。
3)译码器模块和存储模块(图4)。
4)死区模块。用半导体器件作为开关器件并不能达到理想状态,因此当驱动信号到来时,相应的开关状态会有个延迟。为了避免电路在任意逆变器阶段的不足,死区时间是必须要考虑的因素。死区时间由死区模块来完成。也就是说,死区调节单元对来自译码器的三相调制信号(PWMA、PWMB、PWMC)进行调整,把每一相信号分为2部分输出,一部分是上桥臂驱动信号,另一部分是下桥臂驱动信号。这2部分信号相互错开一个死区时间,死区时间的大小根据具体功率器件决定,然后改变死区调节单元的时钟频率,就可以实现死区调节。
2 FPGA实现SPWM仿真分析
选择QuartusⅡ软件[Processing]/[Start Simulation]命令或者单击工具栏的仿真开始按钮运行仿真,以观察设计的时序是否满足要求。经检查,仿真波形基本上满足要求(图5)。

图5为考虑芯片布局布线参数后的时序仿真结果。图中各个量分别代表时钟信号、复位信号、六个全控桥臂信号,从图中可以看出三相桥臂互差120°。仿真时钟频率设为20 MHz,开关频率设为20 kHz,死区时间设为0.5 μs,M设为0.999。通过仿真可以看出该系统能够得到更宽的频率和电压调节范围。

参考文献
[1]吴守箴.电气传动的脉宽调制控制技术[M].第二版.北京:机械工业出版社,2002:101-103
[2]罗宏浩,刘少克.新型SPWM调制技术[J].微特电机,2004(3):55-66
