
统计学在结构噪声监测中的运用
2008-04-24 05:06肖邵予,汪浩,吴英友等
中国舰船研究 2008年4期
1 引 言
从上世纪70年代初期,美国海军就致力于战斗舰艇尤其是潜艇振动和噪声的监测评估。目前美国海军已开发ANVC舰艇主动噪声和振动控制系统,用于实时监测潜艇振动和噪声状态变化,及时发现和消除声学隐患。法国和澳大利亚也随之分别开发了舰艇声学状态监控和管理系统——ASS系统和SASMAS系统。
对结构或机械设备进行振动监测评估通常可以采用以下4种方法:
1) 基于信号处理的方法,是利用信号模型(如相关函数、频谱等)直接分析测量信号,提取幅值、频率等特征值作为评估参数[1,2],该方法需要相对复杂的理论基础;基于解析模型的方法;基于知识的方法和基于统计学方法;
2) 基于解析模型的方法,是需要建立被评估对象的精确数学模型,这在实际中往往很难实现,因此该方法运用较少[3];
3) 基于知识的方法,其中有代表性的就是专家系统和人工神经网络[4,5]方法,而专家系统难以完备,人工神经网络法在解决工程实际问题方面还有待提高;
4) 统计学方法[6,7]是针对测量数据建立统计学模型进行评估,无需了解整个系统输入输出情况,有着灵活、简便、易理解的特点。
本文以潜艇结构噪声加速度级为研究对象,从舱段模型试验数据着手,运用统计数学方法,建立结构噪声统计学模型,并用实艇数据予以验证。
2 统计学模型
从目前测试技术状态而言,10~10 kHz内加速度总级是表征结构噪声的主要参数。因此,本文选用结构噪声加速度总级为监测参数。
同时,利用统计学方法进行状态监测,往往需要大量样本数据,实艇数据远远达不到要求。拟通过舱段模型试验数据作为原始训练数据来探讨结构噪声统计学模型。
2.1 舱段模型试验概述
舱段模型为双层壳体结构。内壳半径3.5 m,外壳半径4.3 m,长10.0 m。测点示意图见图1。

图1 舱段模型试验结构噪声测点示意图
采集方式:舱内海水泵在额定工况下工作,采集分22组,每组采样70个数据,共1 540个原始数据;每组采样间隔时间超过3 h。
2.2 数据统计分析
原始数据库由22组,每组70个数据组成。对每组测量数据采用Grubss判别法,进行离群值判别并剔除,形成基准数据库。
图2、图3横坐标表示按采样时间顺序排列的采样数, 纵坐标表示结构噪声加速度总级。图中可见,原始数据库中存在峰值,经过Grubbs判别法后,明显的峰值被剔除。对基准数据库进行统计分析。
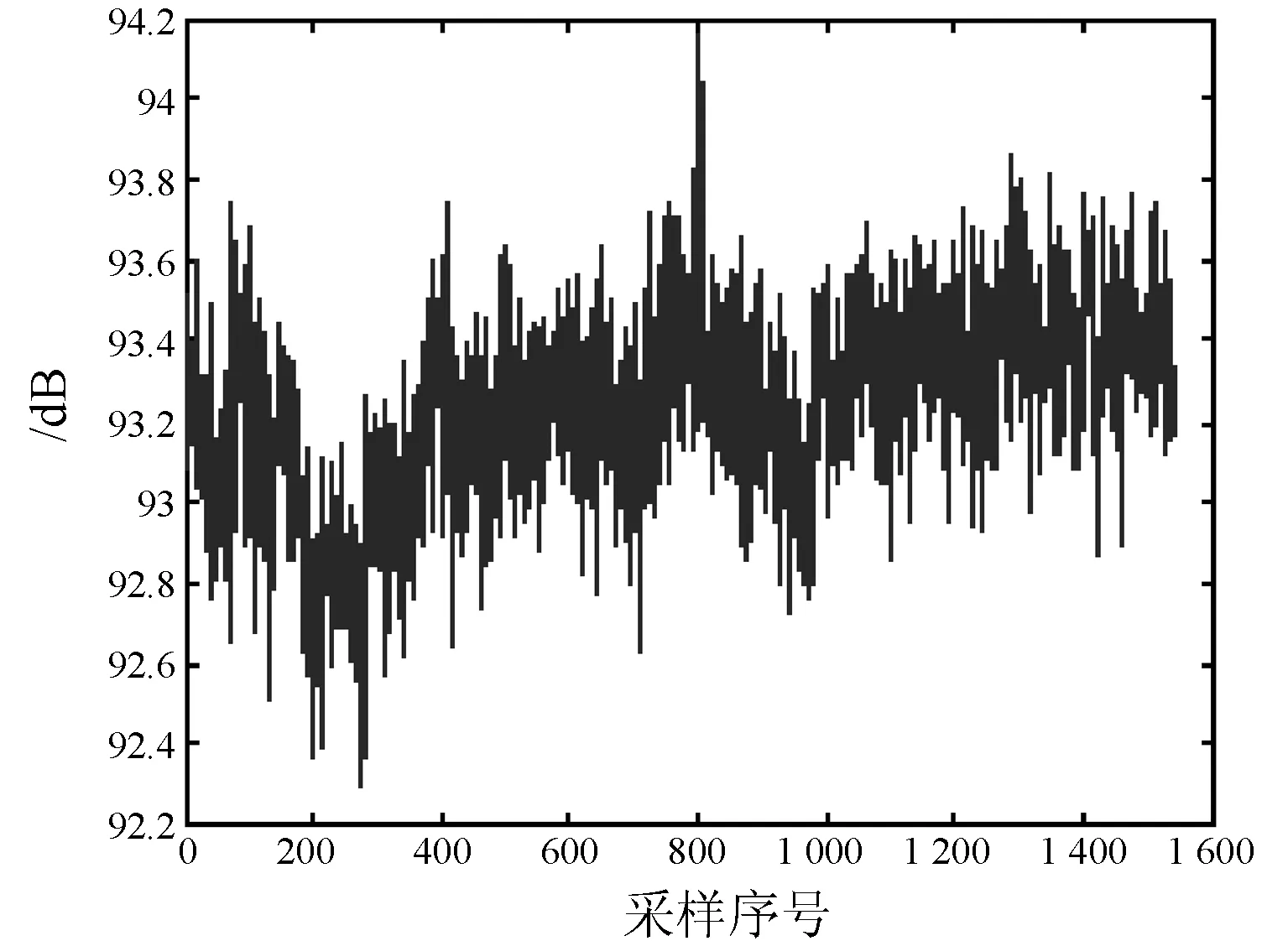
图2 原始数据库
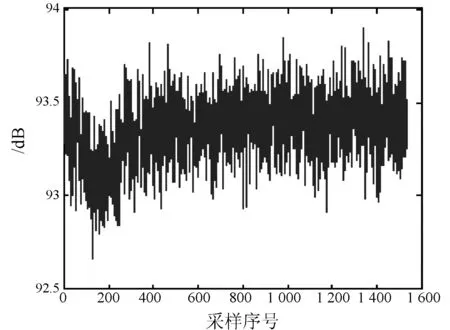
图3 基准数据库
表1基准数据库统计分析
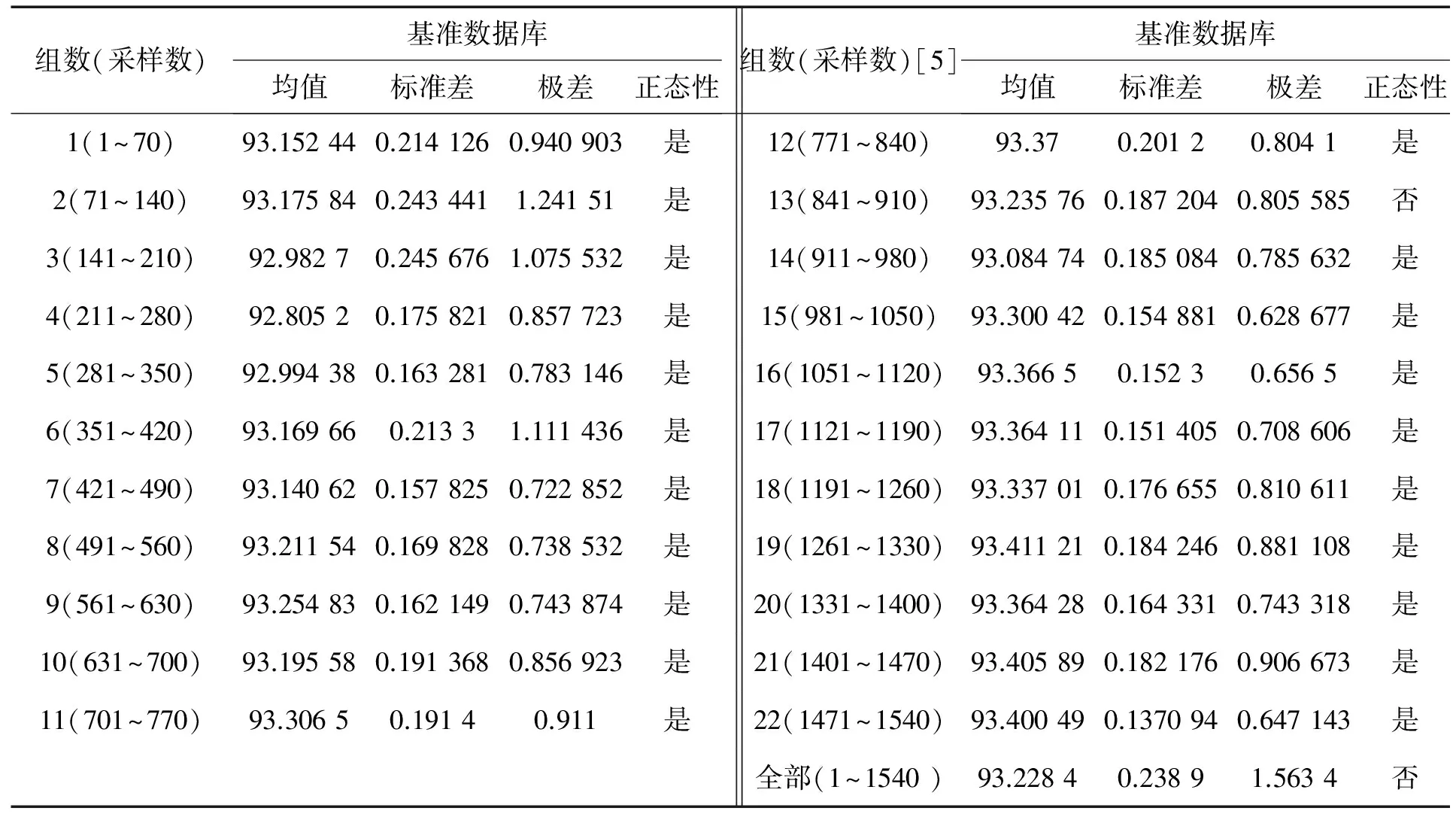
组数(采样数)基准数据库均值标准差极差正态性组数(采样数)[5]基准数据库均值标准差极差正态性1(1~70)93.152440.2141260.940903是12(771~840)93.370.20120.8041是2(71~140)93.175840.2434411.24151是13(841~910)93.235760.1872040.805585否3(141~210)92.98270.2456761.075532是14(911~980)93.084740.1850840.785632是4(211~280)92.80520.1758210.857723是15(981~1050)93.300420.1548810.628677是5(281~350)92.994380.1632810.783146是16(1051~1120)93.36650.15230.6565是6(351~420)93.169660.21331.111436是17(1121~1190)93.364110.1514050.708606是7(421~490)93.140620.1578250.722852是18(1191~1260)93.337010.1766550.810611是8(491~560)93.211540.1698280.738532是19(1261~1330)93.411210.1842460.881108是9(561~630)93.254830.1621490.743874是20(1331~1400)93.364280.1643310.743318是10(631~700)93.195580.1913680.856923是21(1401~1470)93.405890.1821760.906673是11(701~770)93.30650.19140.911是22(1471~1540)93.400490.1370940.647143是全部(1~1540)93.22840.23891.5634否
从表1可以看出:
1) 基准数据库中,22组采样数据,除了第13组正态性稍差,其余21组数据均服从正态分布。
2) 基准数据库总体并不服从正态分布。
3) 每组测量数据的均值和标准差均服从正态分布,详见图4~图6。
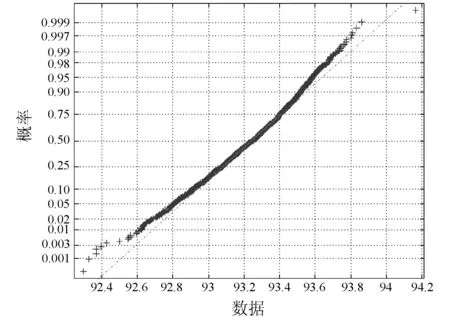
图4 基准数据库正态性检验
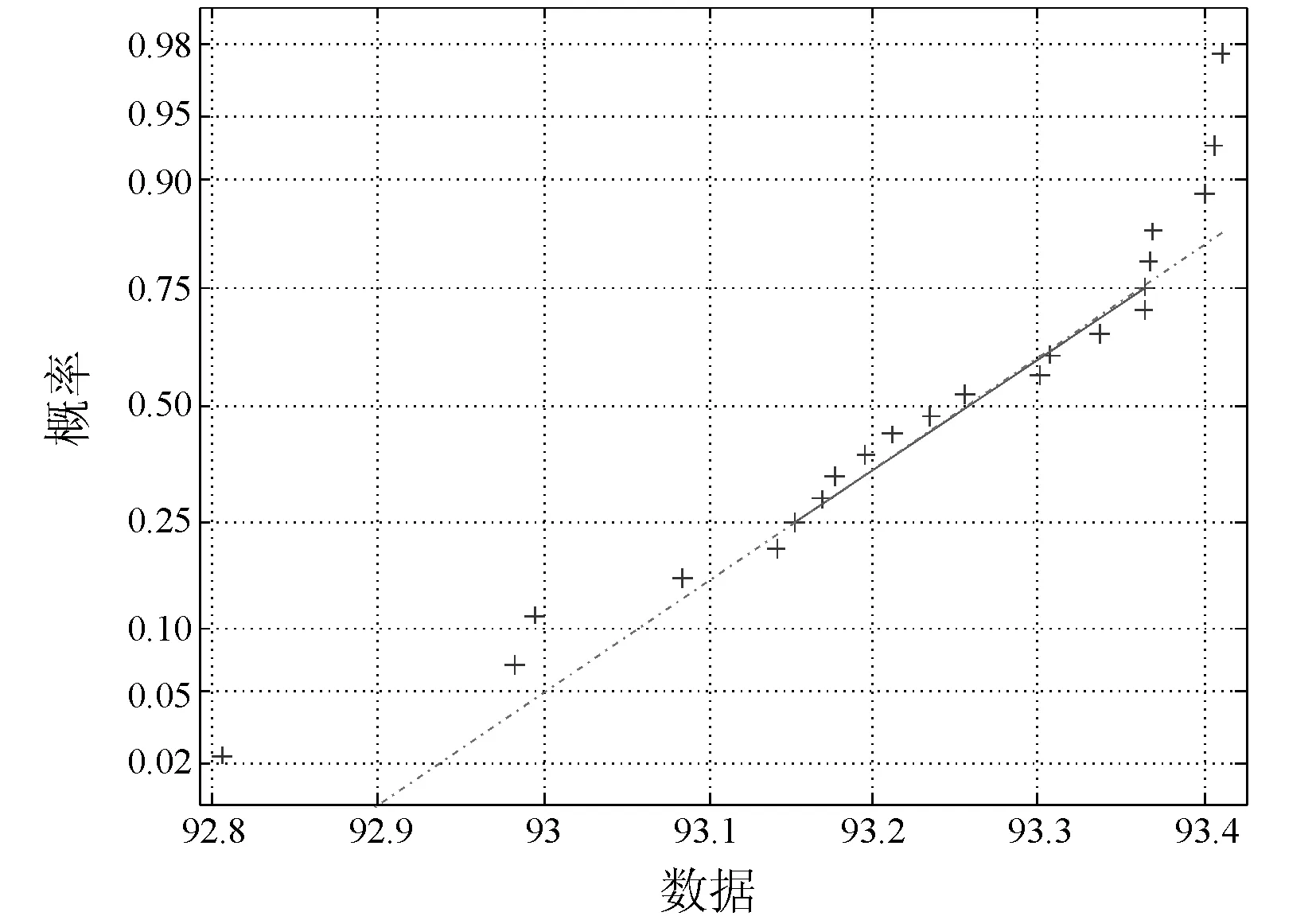
图5 基准数据库中每组均值的正态性检验
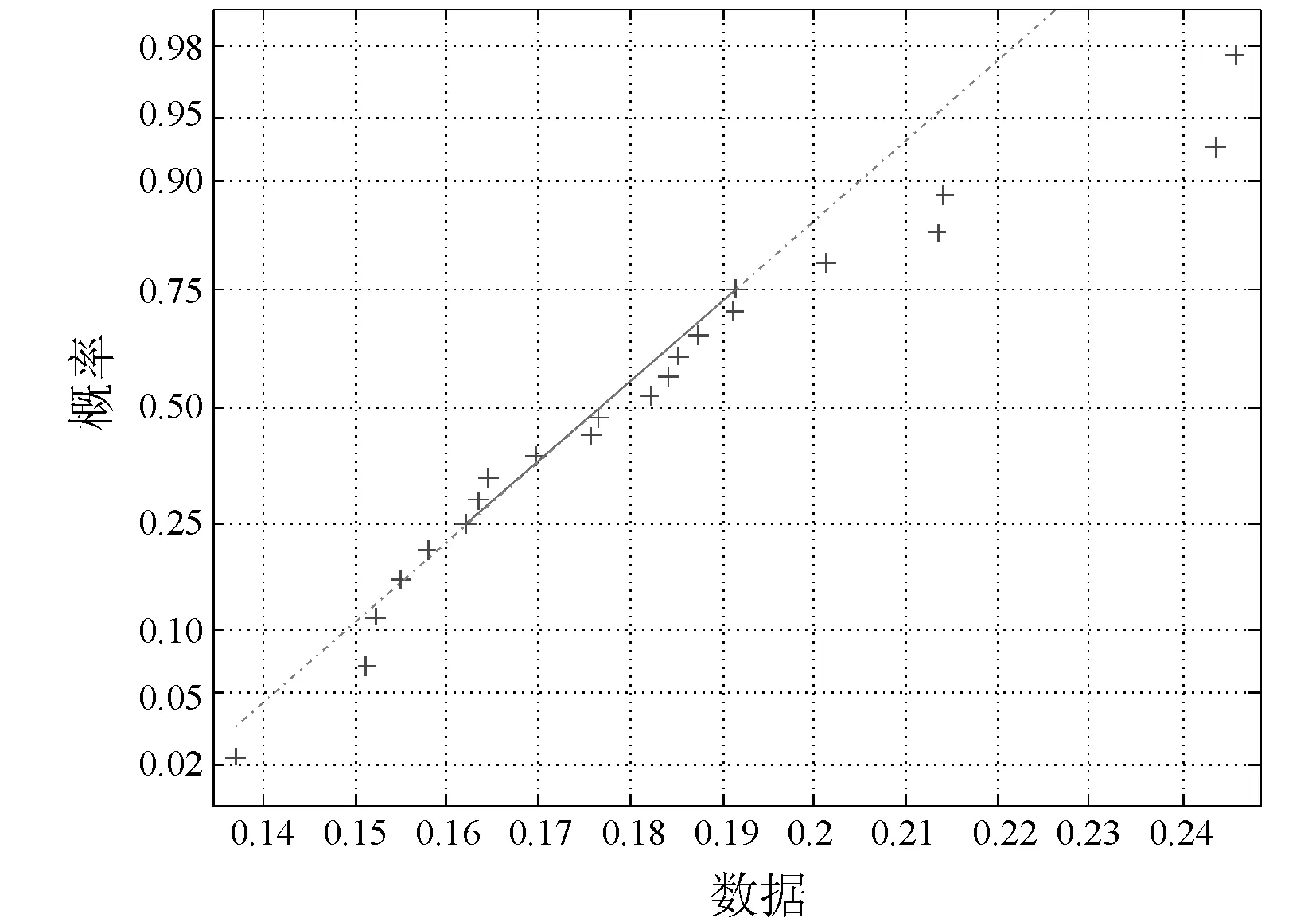
图6 基准数据库中每组标准差的正态性检验
2. 3统计模型的建立
从对基准数据库的统计分析来看,结构噪声数据的变化过程不是绝对平稳过程,并得到如下规律:
1) 每组测量数据服从某种正态分布;
2) 每组测量数据的均值和标准差分别服从某种正态分布;
3) 多组测量数据综合成一个整体,该整体并不服从正态分布假设。
由此可以对结构噪声加速度总级进行假设:其分布包括正常正态随机分布和额外干扰,即xij=μ+σA▯εij+σB▯ηij。

所有测量值xij的总变差ST可进行如下推导:
式中,

由此,得到总变差与组间、组内变差的关系为:ST=SA+SB。
随后推导xij总体标准差σT与定义的统计参数,即组间标准差σA、组内标准差σB的关系。
设:
根据小波变换的原理,为了获得最优去噪质量,选取小波基函数时考虑其对称特点、紧支撑能力、正交性等原则[11],对比dbN、symN小波基,使用新阈值函数和引用的最优阈值规则,在不同分解层下,对模拟的高斯峰数据进行去噪,根据去噪后信噪比的评价指标,选择最佳的小波基和最合适的分解层数.
再由:
⟹
则:
2.4 预警、报警限值
结构噪声测点预警、报警限值表示为:
式中,A为预警、报警限值系数。它与基准数据库样本总体均值、样本总标准差(或组间、组内标准差)共同决定了预警、报警限值的大小。
为确定常数A,利用舱段模型试验采集的22组×70(共1 540)个数据进行反演。整个测量过程中,系统和环境均认为是正常状态,考虑到测量装置和系统结构以及环境的随机干扰因素,假设预警、报警原则:在整个结构噪声加速度总级变化过程中,存在1%的误报警率和5%的误预警率。在该原则下,可得到A=1.6,对应预警限值的系数A=2.1,对应报警限值系数。
2.5 算 例
2.5.1舱段内模拟故障数据
舱段模型试验中,采用在舱内加入人为干扰来模拟异常状态。共采集64个待监测数据,待监测数据分为4个阶段:
阶段1——序号1~20是海水泵在额定工况下运行采集的正常数据;
阶段2——序号21~40是人为改变海水泵工况后采集的数据;
阶段3——序号41~55是人为将海水泵工况再次调至额定工况下的正常数据;
阶段4——序号56~64是人为在甲板上跺脚时采集的数据。
其中,阶段2和阶段4模拟故障状态;阶段1和阶段3为正常数据。
在海水泵额定工况下,分10组采样,每组采集10个数据共100个数据作为原始数据库。利用上述方法,对待监测数据进行状态监测。
图7可见, 64个模拟故障数据中,第1~20个数据未超过预警限值,均为正常;第21~40个数据均超过报警限值;第41~55个数据又回到预警限值之下;第56~64个数据超过报警限值。本方法能准确地监测出阶段2和阶段4的故障信息。
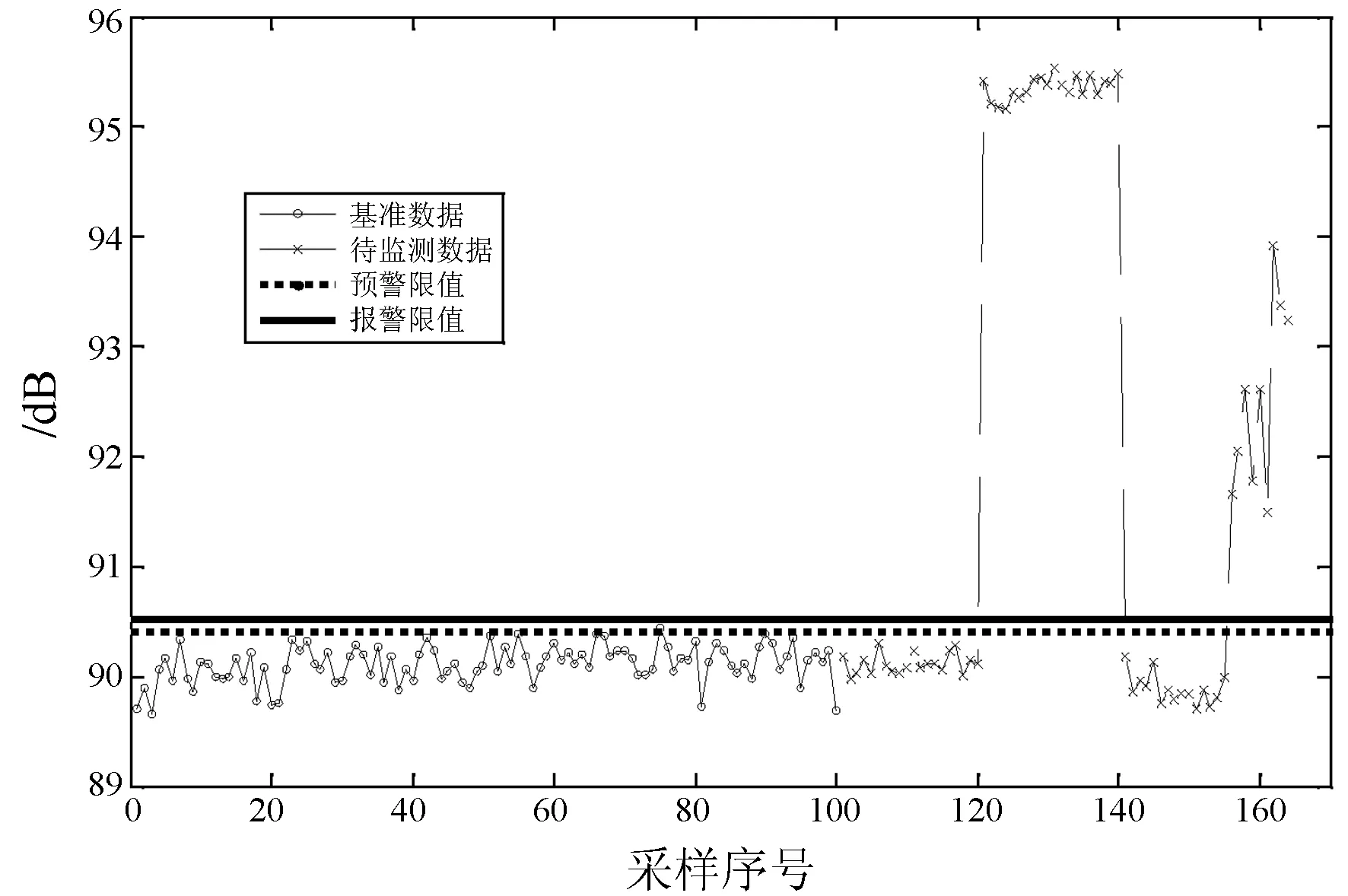
图7 舱段内模拟故障数据的监测
2.5.2实艇数据验证
航行试验中,在某工况下,动力舱一结构噪声测点采集了10个单程数据(共203个原始数据),见表2。
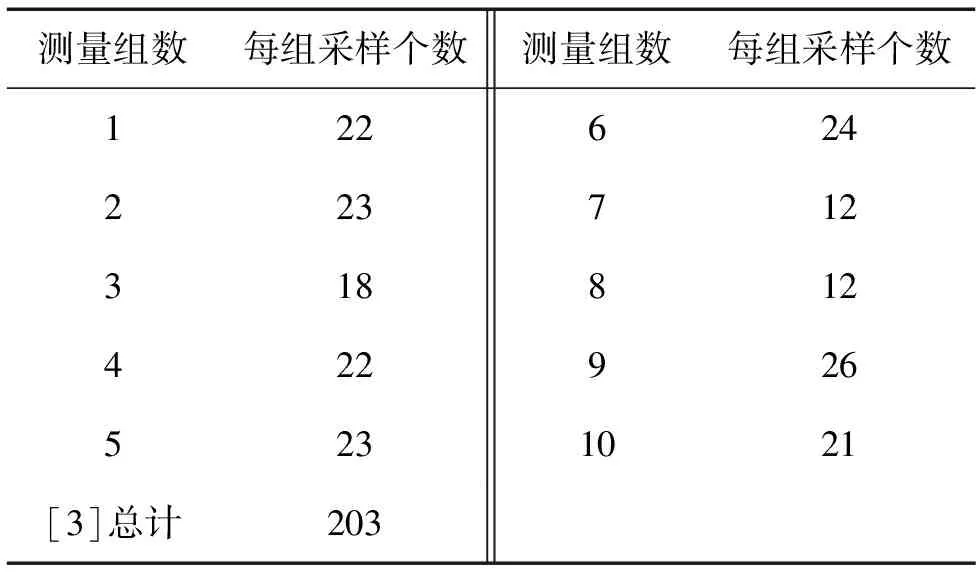
表2 测点数据信息表
采用两种计算方案:
1) 将该测点第3、7、8三组数据作为待监测数据,其余7组数据作为原始数据库;
2) 原始数据与方案1)相同。
由于缺乏实艇故障数据,故将同舱段其他测点作为故障数据点,把故障数据点采集的203个数据按采集时间先后顺序取出前20个数据和后20个数据作为待监测数据。
计算结果如下:
计算方案1——共45个待监测数据,仅1个超过预警值,其余均正常;
计算方案2——共40个待监测数据,36个超过报警限值,4个超过预警限值,0个正常。
计算结果表明,本方法能简单而迅速地分辨出实艇结构噪声的异常数据。

图8 计算方案1的监测状态

图9 计算方案2的监测状态
3 结 论
本文主要通过舱段模型试验, 采集大量数据进行统计分析,抽象出潜艇结构噪声统计学模型,建立相应预报警限值,形成一套简单快捷的结构噪声监测方法。并分别在实验室和实艇条件下,对结构噪声故障状态进行模拟,运用本文方法进行故障监测。监测结果表明本文方法简单、有效。
[1] 肖汉才,张国忠.运用频谱分析诊断汽轮机调速泵组的振动[J].动力工程, 2001, 21(1):1059-1061.
[2] 李峰,张英堂.基于小波和奇异谱降噪理论的轴承故障诊断研究[J].轴承, 2003( 7):30-33.
[3] Dalton,Tracy. Model-based fault diagnosis of a two-pump system[J].Transactions of the Institute of Measurement and Control, 1998, 20(3):115-142.
[4] 张建华,侯国莲,孙晓刚.采用概率神经网络的汽轮机故障诊断方法[J].动力工程, 2005, 25(5):698-701.
[5] 栾美洁,许飞云,贾民平.旋转机械故障诊断的神经网络方法研究[J].噪声与振动控制, 2008, 28(1):85-88.
[6] 李力,赵新泽.应用统计数学方法增进机器状态识别技术[J].实用测试技术, 2000, 26(3):34-36.
[7] 王飞,李保华,冯伟,等.统计过程控制在无人机故障预报系统中的应用[J].中国测试技术, 2007, 33(1):23-25.
猜你喜欢
太空探索(2022年3期)2022-03-28
四川环境(2022年1期)2022-03-08
国际太空(2021年8期)2021-11-05
计算机技术与发展(2020年9期)2020-11-26
航天器工程(2018年4期)2018-09-15
舰船科学技术(2018年7期)2018-07-25
中国神经免疫学和神经病学杂志(2018年6期)2018-01-15
汽车与安全(2017年4期)2017-12-07
投资北京(2017年1期)2017-02-13
专用车与零部件(2016年2期)2016-04-11
