
双足足球机器人守门策略研究
2007-07-05 01:40崔樱杨晶东
智能计算机与应用 2007年3期
崔 樱 杨晶东
摘要:首先提出了双足足球机器人的体系结构。然后给出了基本步态算法,针对FIRA类人型项目比赛规则·提出了全新的双足足球机器人守门策略,最后给出了分析测距试验数据,验证了测距准确性和守门策略的合理性。
关键词:守门策略射门策略取足足球机器人
中图分类号TP242.6文献标识码A文章编号:1002-2422(2007)03-0002-03
1制体系结构
双足机器人每条腿共有6个自由度,分别腿部髋关节(3个)、膝关节(1个)、踝关节(2个)。详细的体系结构如图1所示。

2基本步态算法
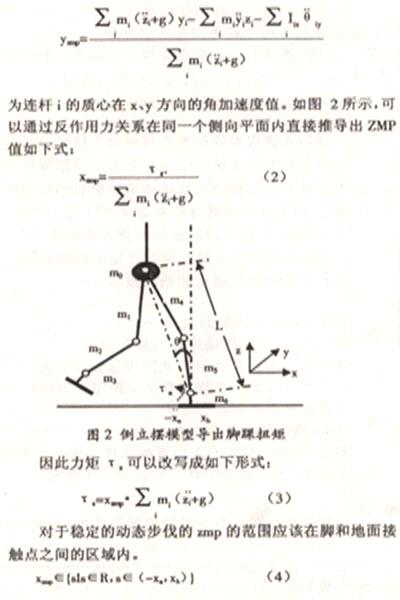
ZMP(zero moment point)是行走地面上的一点,在该点由作用在机器人上的主动力和主动力矩所产生的合力矩水平方向分量为零。基于这种概念可以得出结论:
如果支撑作用的膝关节保持恒定,我们就可以推导出ZMP在稳定区域内踝关节的扭矩范围。此结果是适应于避障行走、快速行走、爬楼梯等动、静态步伐,在满足动态平衡的情况下最大速度可以达到3cm/s。
3测距策略
哈工大足球机器人测距过程是通过CCD传感器和头部伺服电机位置信息融合来实现的。首先通过头部的俯仰、水平伺服电机转动来跟踪目标物体(球),经过找球并且对中到摄像机的视野中央后,头部的俯仰伺服电机就会对应一个十六进制电机值PWMY。不同的距离处,对应的俯仰电机值会不同,俯仰角度n也不同,这个角度和所测距离Lx就会有一定的函数关系,我们利用几何三角函数知识可以得到函数关系式。
4守门策略
守门策略是一项容易被忽视的策略,从第四届FIRA比赛的情况来看,各参赛队都没有做这一策略,各队机器人守门时都选择原地不动,等待对方射门。其实这种策略是不完备的。其主要原因如下:
(1)由于球门很宽,一旦球被射偏一些,很容易进球得分。
(2)守门员出击行进的距离要远小于射门员走的距离,所以守门员完全有时间在射门员射门之前出击封堵进球路线,增加对方的射门难度。
(3)跟据FIRA比赛规则,若守门员挡住射门员的射门的成绩相当于射门员没有射进,所以守门策略做的好,同样会取得比赛胜利。图4给出了守门员出击路径规划策略示意图。
其详细的守门流程如下:
步骤1:初始化伺服电机、数字罗盘方向角a、视觉通讯端口;
步骤2:按全局分区标定调色板参数扫描球所在的区域△ABC;
步骤3:IF RGB∈标定阈值,IF RGB∈左侧阈值,t=1,ELSE右侧阈值t=2,跳转步骤4;ELSE重复步骤2。
步骤4:把球对中到视觉视野中央;
步骤5:记录当前俯仰、水平电机对应的十六进制电机值,测距并计算静态横向移动步数;
步骤6:还原水平电机到初始位置;
步骤7:IF t=1向左侧移动,
ELSE
向右侧移动:
步骤8:分开双腿呈V字形守门动作。
5试验分析
双足机器人测距过程是通过CCD传感器和头部伺服电机的综合参数测得的,平均误差率为0.2741。
实验结果分析:
(1)测距实验受机器人的所处位置和自身姿态等因素影响很大,机器人站立位置和姿势稍有变化都会对测距的准确性有很大影响,所以这一误差率是正常的。
(2)测距的目的是设定机器人横行移动步数,如果误差过大可以在设定步数值时加以修正。加之,测距对其准确性要求不高,只要能保证机器人快速找到球的准确位置并横向对准球即可。
(3)设定行走步数时一定要有余量,不要越过能够封堵地方向。
比赛结果证明这一测距过程是能满足比赛要求的。
猜你喜欢
考试与评价·高二版(2021年1期)2021-09-10
发明与创新·中学生(2020年1期)2020-08-03
信息技术时代·上旬刊(2019年4期)2019-09-10
发明与创新·小学生(2018年7期)2018-08-06
意林(2018年2期)2018-02-01
武昌理工学院学报(2016年4期)2017-01-17
企业技术开发·下旬刊(2016年8期)2016-10-13
