
一种翼滑艇和滑行艇新型尾鳍研究
2007-01-28 06:51
船海工程 2007年3期
江苏科技大学 船舶与海洋工程学院 镇江 212003
目前,国内外使用的船舶减摇装置主要有舭龙骨、减摇鳍、减摇水舱和舵减摇[1-4]。这些减摇装置大都用于减小船舶的横摇,且多数使用于大型的排水型船舶。快艇减摇装置的研究工作尚显滞后。在高速艇尾部安装压浪板和楔形板[5,6],在一定程度上能够起到调整艇航行纵倾角、改善艇阻力特性的作用,但动稳性和航行安全性下降,有时甚至没有保障;具有首置割划式水翼的翼滑艇航行时动稳性更存在不足。
1 新型尾鳍及其水动力模型
1.1 新型尾鳍结构简介
该尾鳍主要与浅V型滑行面线型配合,成对布置于船尾,由主板和鳍板构成主板,通过铰链或联接轴与艇尾封板下边缘相联接,鳍板联接于主板外侧边缘。其中鳍板与主板的联接主要有两种类型。一种为鳍板固接于主板外侧边缘,可整体绕艇尾封板下边缘转动;另一种为鳍板通过联接轴与主板外侧边缘相联,鳍板可绕其边缘连接轴旋转。主板和鳍板平面形状为矩形、梯形或普通四边形。主板纵剖截面为矩形,鳍板纵剖截面为机翼形或弓形或月牙形。结构见图1。

1-鳍板;2-主板;3-伸缩油缸;4-铰链;5-艇尾。图1 新型尾鳍结构示意图
1.2 新型尾鳍水动力模型
尾鳍的主板和鳍板两部分的剖面形状以及在流场中的受力特性差异很大,分别分析水动力。
主板是一块平板,水动力分析借助于平板滑行理论,而鳍板是一水翼,其水动力分析则运用三元机翼理论[7]。
尾鳍减艇纵摇时,左右尾鳍同时起作用,主板部分同时向下或向上转动相同的角度,主板与艇底的夹角即为安装角ε。规定向下转主板时ε>0;向上转主板时ε<0。尾鳍减艇横摇时,左右尾鳍同时起作用,主板部分向相反的方向转动相同的角度,即保持左右尾鳍的安装角分别为+ε和-ε。根据尾鳍的受力大小及其位置参数,可以计算出对艇摇心的力矩,该力矩即为尾鳍产生的摇动对抗力矩,起减摇及调整艇航行纵倾角的作用。
2 滑行艇及翼滑艇运动模型
目前国内外对于高速艇在波浪中的运动几乎全部采用试验的方法预报耐波性。因此,借鉴现有常规船舶运动方程资料,并结合滑行艇和翼滑艇的特点,分析受力求解纵摇及横摇恢复力矩项。运动方程中所涉及的惯性力矩、阻尼力矩、波浪扰动力矩和尾鳍产生的对抗力矩可以参考文献[8]。下面重点介绍纵摇恢复力矩的计算。
艇的纵摇恢复力矩计算可以参考图2、3。
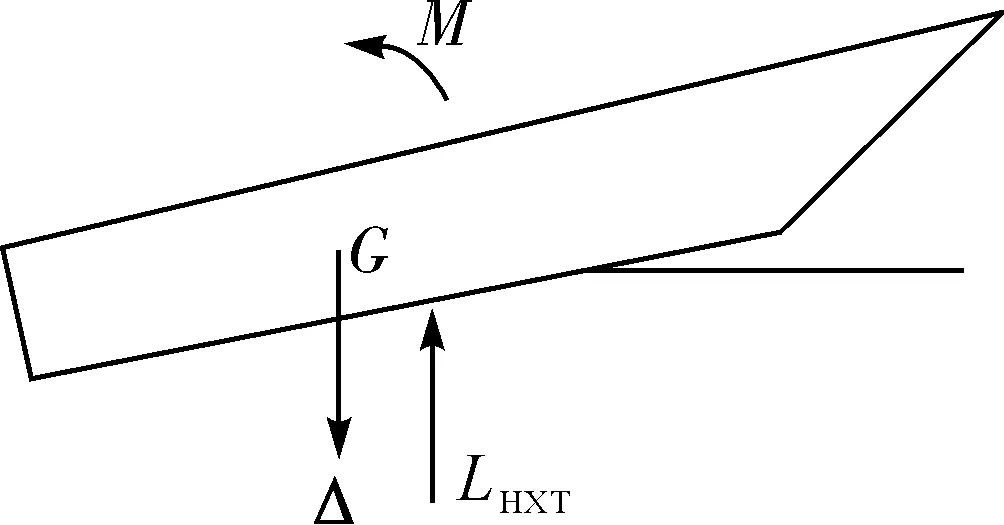
图2 滑行艇纵摇恢复力矩计算

图3 翼滑艇纵摇恢复力矩计
滑行艇纵摇恢复力矩M(θ)为:
M(θ) =-LHXT(Lg-0.75lT)cosθ
≈-Δ(Lg-0.75lT)cosθ
(1)
式中:LHXT——滑行面升力,N;
Lg——重心至尾距离, m;
lT——湿长度, m;
θ——纵倾角,(°)。
翼滑艇纵摇恢复力矩MY(θ)为:
MY(θ)= -[LHXM(Lg-0.75lT)cosθ-
LGHL(LH2END-Lg)/cosθ]
(2)
式中:LHXM——滑行面升力,N;
LGHL——水翼升力,N;
LH2END——水翼支柱至尾封板距离,m。
滑行艇和翼滑艇(安装尾鳍)线性纵摇运动方程可以表示为:
(3)
式(3)中从左至右依次为纵摇惯性力矩、阻尼力矩、恢复力矩、纵摇波浪扰动力矩、尾鳍减纵摇力矩。
3 滑行艇及翼滑艇推进系统模型
3.1 阻力模型
利用前苏联中央流体动力中心ЦАГИ法求艇的阻力。使用该方法需要查力矩关系曲线和动载荷系数关系曲线[9],为了便于仿真模型实时调用这些数据,利用曲线拟合的方法得到λ=f(FNB)函数关系式。利用Matlab编制函数库,就可以得到在不同航速vs情况下(即不同的FNB)对应的湿长宽比λ。
3.2 螺旋桨推进模型
螺旋桨是高速艇最常用的推进器,有效推力为
(4)
式中:KT——螺旋桨推力系数;
DP—螺旋桨直径,m;
n——转速,r/s;
t——推力减额分数。
3.3 阻力和推进仿真模型
在平动方程的基础上建立该推进系统的仿真模型。
(5)
式中:m——艇质量(含附加质量),kg;
TP——推进器有效推力,N;
RT—艇的总阻力,N。
4 算例及分析
利用Matlab/Simulink[10]建立滑行艇和翼滑艇运动及尾鳍减摇联合仿真模型。限于篇幅仅将滑行艇运动-尾鳍减摇联合仿真模型分别示于图4、5。
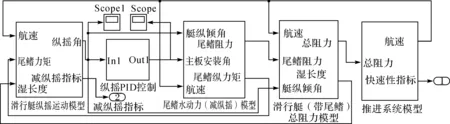
图4 滑行艇纵摇运动-尾鳍减摇联合仿真模型
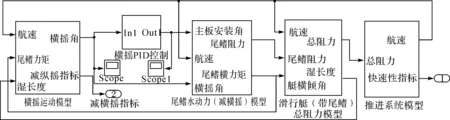
图5 滑行艇横摇运动-尾鳍减摇联合仿真模
以上仿真模型将艇的纵摇运动和横摇运动分开考虑,研究在正横规则波及迎浪条件下艇运动及尾鳍减摇仿真效果。
选用排水量Δ=1.4 t的滑行艇和翼滑艇作为算例,其主尺度及艇型参数、螺旋桨及波浪条件分别见表1~ 3。
不同艇型及用途(减横摇或减纵摇)的尾鳍几何尺寸以及控制器相应的参数存在差异。通过建立快速性及减摇特性综合优化模型,对尾鳍及控制器进行优化计算。结果见表4、5。
滑行艇及翼滑艇安装尾鳍后在波浪中的航行纵倾角以及横摇角情况见图6~9。

表1 1.4 t滑行艇/翼滑艇主尺度及艇型参数

表2 V型水翼主要参数
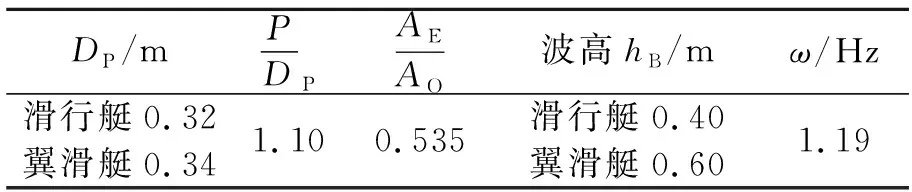
表3 螺旋桨及波浪参数

表4 滑行艇运动PID控制尾鳍优化结果

表5 翼滑艇运动PID及PD控制尾鳍优化结果

图6 滑行艇(带尾鳍)纵摇角变化曲线

图7 滑行艇(带尾鳍)横摇角变化曲线
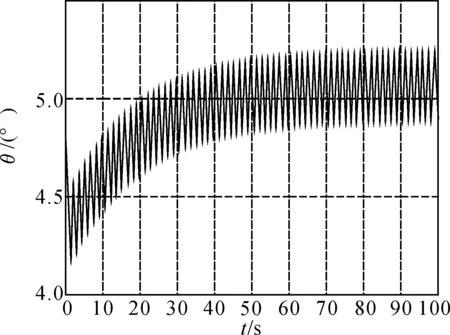
图8 翼滑艇带尾鳍纵摇角变化曲线

图9 翼滑艇带尾鳍横摇角变化曲
通过尾鳍的作用,滑行艇能够以很小的波动(±0.21°)沿最佳航行纵倾角航行;横摇运动幅值非常小,仅为0.025°;翼滑艇能够以±0.17°的波动沿最佳航行纵倾角航行;横摇运动幅值为0.08°。说明该新型尾鳍应用在V型艇底的快艇上,具有十分强大的减摇及实时调整艇航行纵倾角,进而保证艇在波浪中的动稳性及快速性的功能。
5 结论
滑行艇和翼滑艇新型尾鳍由于主板和鳍板具有独特的水动力特性,与压浪板最大的区别就是:压浪板仅能产生使艇纵倾角减小的力矩,而面对艇航行纵倾角过小,需增大纵倾角时,却无能为力;仿真计算结果表明新型尾鳍能够根据艇运动信息,实时调整艇的航态,以保证动稳性和快速性。该尾鳍结构简单、控制系统及执行机构复杂度不高,自身重量较小,便于实际工程应用,能够弥补现有快艇运动稳定装置的许多不足。
[1] 冯铁城, 朱文蔚, 顾树华. 船舶操纵与摇荡[M].北京:国防工业出版社, 1989:130-133.
[2] 金鸿章, 王科俊, 吉 明. 智能控制在船舶减摇鳍系统中的应用[M]. 北京:国防工业出版社, 2003:6-8.
[3] LEE B S, VASSALOS D V. Investigation into the stabilization effects of anti-roll tanks with flow obstructions [J] .InternationalShipbuildingProgress,1996 (43):71-88.
[4] 杨承恩, 田 园, 毕英君. 船舶舵阻摇技术的回顾与展望[J]. 世界海运, 2002, 25(4):4-7.
[5] 裘泳铭, 顾敏童, 李培勇. 改善小型高速艇总体性能的措施研究[J]. 船舶工程, 2000(4):9-11,16.
[6] 郭值学. 高性能船的发展与前景之管见(一) [J]. 中国造船, 2001,42(4):73-82.
[7] 董祖舜. 快艇动力学[M]. 武汉:华中理工大学出版社, 1991:93-97.
[8] 李积德.船舶耐波性[M].哈尔滨:哈尔滨船舶工程学院出版社,1992:34-66.
[9] 邵世明, 王云才. 高速艇动力学[M]. 上海:上海交通大学出版社, 1990:90-93.
[10] 张志涌.精通MATLAB 6.5版[M].北京:北京航空航天大学出版社, 2003:361-383.
猜你喜欢
轻工机械(2022年5期)2022-10-31
学苑创造·A版(2022年4期)2022-06-18
南方农业学报(2020年7期)2020-11-09
科学技术与工程(2020年20期)2020-08-03
当代陕西(2020年24期)2020-02-01
股市动态分析(2019年12期)2019-07-08
股市动态分析(2019年50期)2019-01-03
证券市场红周刊(2018年40期)2018-05-14
证券市场红周刊(2018年40期)2018-05-14
中国航海(2014年1期)2014-05-09
