基于整车模型的动力总成悬置系统稳健性优化
2025-03-07 00:00:00吕辉张家明杨志娟上官文斌
湖南大学学报·自然科学版 2025年2期
关键词:电动汽车





















摘要:针对纯电动汽车动力总成悬置系统(powertrain mounting system, PMS)参数同时具有不确定性和相关性的复杂情形,基于整车13自由度(degree of freedom, DOF)模型开展纯电动汽车PMS稳健性优化设计研究. 首先,基于蒙特卡洛抽样和相关性变换方法提出一种概率参数相关情形下PMS 固有特性响应不确定性和相关性分析的UTI-蒙特卡洛(UTI-MonteCarlo, UMC)法;然后,结合相关性变换方法和任意多项式混沌展开,推导一种高效求解PMS响应不确定性和相关性分析的UTI-任意多项式混沌展开(UTI-arbitrary polynomial chaosexpansion, UAPCE)法;接着,基于UAPCE法和相关系数赋权法,提出一种考虑响应不确定性和相关性的PMS稳健性优化设计方法;最后,通过算例验证提出方法的有效性,并对比了基于传统6 DOF模型和整车13 DOF模型的分析和优化结果. 结果表明,基于整车13 DOF模型得到的计算结果能更好地反映整车环境下PMS的振动特性;以UMC方法为参考,UAPCE法在求解PMS固有特性响应的不确定性和相关性方面具有良好的计算精度和效率;提出的优化设计方法能够合理配置系统参数,提高系统稳健性.
关键词:电动汽车;动力总成悬置系统;整车13自由度模型;参数不确定性和相关性;固有特性;稳健性优化
中图分类号:U463.51 文献标志码:A
动力总成悬置系统(powertrain mounting system,PMS)是影响车辆振动性能的重要系统,具有支承、限位和隔振等功能[1]. 纯电动汽车和传统燃油汽车的振动噪声问题存在较大差异. 一方面,纯电动汽车动力总成质量小于传统燃油汽车,在相同激励下纯电动汽车动力总成的振动更加显著[2]. 另一方面,由于缺少发动机“掩蔽效应”,纯电动汽车出现了新的噪声振动问题(例如电磁噪声和齿轮啸叫). 此外,纯电动汽车参数存在不确定性[3-4],也会对整车振动性能造成影响. 因此,对PMS进行不确定性分析和优化设计,有助于改善纯电动汽车振动性能,对提高纯电动汽车驾乘舒适性有重要意义.
近年来,针对PMS固有特性开展的不确定性研究已经很成熟. 刘春梅等[5]考虑了悬置刚度的制造误差等不确定因素,提出了一种PMS的可靠设计流程. 吴杰等[6]将悬置刚度分别处理为均匀分布和正态分布变量,提出了系统固有特性可靠性优化设计方法. 谢展等[7]将悬置刚度处理为区间不确定参数,将稳健设计与多目标优化相结合,提出了一种PMS稳健优化设计方法.Cai等[8]和Lü等[9]将悬置系统中具有足够样本信息的参数处理为随机变量,样本数据有限的参数处理为区间变量,分别提出了复杂情形下PMS固有特性响应的不确定性分析与优化设计方法. 吕辉等[10]引入多维平行六面体模型处理PMS参数相关性和独立性并存情形,结合蒙特卡洛法和摄动法提出了一种非概率不确定情形下PMS响应的不确定性分析方法.
上述研究工作均基于6自由度(degree of freedom,DOF)模型进行PMS不确定性分析和优化设计. 基于传统6 DOF模型的PMS不确定性分析和优化设计已经取得较多成果. 但是,PMS作为整车不确定环境中隔离振动的弹性系统,其固有特性响应受到多个系统部件共同影响. 传统6 DOF模型将PMS从整车环境中分离出来,假设其支承于刚性基础,忽略车身质量、悬架刚度、轮胎刚度等因素及其不确定性对PMS固有特性响应的影响,不能准确地反映动力总成在整车不确定环境下的振动特性,使得不确定性分析结果和优化模型缺乏一定真实性. 此外,目前基于概率模型处理PMS不确定参数相关性时,往往涉及二维积分或非线性方程组等复杂计算,极大地增加了分析计算成本.
本文建立纯电动汽车整车13 DOF模型,分别采用随机模型和相关系数描述系统参数的不确定性和相关性,在同时考虑PMS、车身、悬架和车轮等影响因素的基础上,开展纯电动汽车PMS固有特性响应的稳健性优化设计研究,以期为纯电动汽车PMS优化设计提供理论基础和参考.
1 整车模型参数的不确定性和相关性
1.1 整车模型
对纯电动汽车PMS固有特性进行分析时,将车身、电驱动总成以及非簧载质量视为刚体,悬置简化为具有三向刚度的弹性元件,悬架和车轮简化为仅具有竖直方向刚度的弹簧[11]. 建立整车坐标系Go-XoYoZo,并分别于各自质心位置建立电驱动总成坐标系Gpo-XpoYpoZpo、车身坐标系Gbo-XboYboZbo、非簧载质量坐标系Gui-XuiYuiZui(i=1,2,3). 其中,Xo轴、Xpo轴、Xbo轴和Xui轴方向与汽车前进方向相反;Zo轴、Zpo轴、Zbo轴和Zui轴方向垂直指向上方;Yo轴、Ypo轴、Ybo轴和Yui 轴方向根据右手定则确定. 某纯电动汽车整车13DOF动力学模型如图1所示. 模型13个自由度分别为PMS 6个方向自由度、车身3个方向自由度(侧倾、俯仰和竖直方向)和4个非簧载质量竖直方向自由度.
由运动学方程可得整车自由振动的特征方程为:
(M-1 K - ω2iI )ϕ i = 0 (1)
式中:M 为系统质量矩阵;K 为系统刚度矩阵;ωi 为第i 阶固有频率对应的圆频率;ϕ i 为第i 阶振型;I 为单位矩阵.
第i 阶固有频率为:
fi = ωi /2π (2)
当系统以第i 阶固有频率振动时,第k 个广义坐标上的振动能量为:
式中:ϕk,i 为ϕ i 的第k 个分量;Mk,j 为M 的第k 行第j 列元素. 第i 阶模态对应的解耦率di 定义为:
di = max k = 1,2,…,13Ek,i (4)
1.2 参数不确定性和相关性
采用随机向量x = [ x1,x2,…,xn ]T 描述系统n 个不确定参数,变量xα 的均值和标准差分别记为exα 和σxα,xα 和xβ 之间的相关系数记为ρxα,xβ,则向量x 的协方差矩阵可以表示为:
UTI变换方法[12]可根据不确定参数的均值向量和协方差矩阵实现相关性变量向独立变量转换,且不涉及二维积分或非线性方程组等复杂计算. 基于UTI变换,将相关随机向量x 向独立向量转换的具体步骤如下:
设u = [u1,u2,…,un ]T 和x͂ = [ x͂1,x͂2,…,x͂n ]T 分别为独立的标准正态随机向量和具有相关性的正态随机向量,ui和x͂i 之间的关系可表示为:
x͂i = F-1 xi (Φ (ui )) (6)
式中:Φ ( )为标准正态分布函数;F-1 xi ( )为xi累计分布函数的逆函数.
相关随机向量x 可以表示为:
式中:ex = [ex1,ex2,…,exn ]T 为随机向量x 的均值向量;根号下Cx 为协方差矩阵的矩阵平方根.
2 响应不确定性和相关性分析
2.1 UMC 法
基于蒙特卡洛抽样和UTI变换提出一种求解概率参数相关情形下PMS固有特性响应不确定性和相关性分析的UTI-蒙特卡洛(UTI-Monte Carlo, UMC)法,其主要步骤为:
1)根据n 维随机向量x 的标准差以及变量之间的相关系数建立协方差矩阵.
2)根据协方差矩阵计算矩阵平方根根号下Cx .
3)根据标准正态分布概率密度函数进行抽样,得到一n × m 维独立样本矩阵u = [u1,u2,…,un ]T.
4)根据式(6)和式(7)进行相关性变换,将独立样本矩阵u 转化为相关样本矩阵x = [ x1,x2,…,xn ]T.
5)将[ x1,i,x2,i,…,xn,i ]T 代入PMS的13自由度模型,计算第i 组样本对应的系统固有特性.
6)重复步骤5)m 次,计算m 组响应的均值、标准差以及响应之间的相关系数.
上述方法可以作为参考方法,用于验证其他PMS响应不确定性和相关性分析方法的有效性.
2.2 UAPCE 法
UMC法计算效率往往较低,因此进一步提出一种高效求解PMS响应不确定性和相关性的UTI-任意多项式混沌展开(UTI-arbitrary polynomial chaosexpansion, UAPCE)法.
以Y (x ) 表示PMS固有特性响应函数,基于任意多项式混沌展开,Y (x )可表示为[13]:
式中:ci 为多项式基的展开系数;φi (u)为向量u 的第i阶多项式基.
系统响应可以通过任意多项式混沌(arbitrarypolynomial chaos,APC)展开表示为:
式中:sα (α = 0,1,…,n) 是变量uα 的展开阶数;n 为不确定参数个数;ci1,…,in 为多项式基的展开系数;φi1,…,in (u ) 为向量u 的多项式基,其可表示为多项式基的乘积.
uα 的任意多项式基φi (uα )满足以下递推关系:
bi φi (uα ) = (uα - ai )φi - 1 (uα ) + bi - 1 φi - 2 (uα )(11)
式中:ai 和bi 为待求未知系数,且φ-1 (uα ) = 0,φ0 (uα ) = 1.
变量uα 的第i 阶统计矩计算如下:
μixα = ∫Ωuiα w(uα )duα (12)
式中:w(uα )为变量uα 的概率密度函数.
将uα 的统计矩表示成如下Hankel矩阵形式.
对矩阵Hα 进行Cholesky分解,即Hα = RTα Rα,根据Rα 可确定未知系数. 然后,对Jacobi矩阵Jα 进行特征值分解,可获得uα 对应的高斯积分节点向量ûα =[ûα,1,ûα,2,…,ûα,qα ]T 和高斯积分权值向量ŵα =[ŵα,1,ŵα,2,…,ŵα,qα ]T,其中qα 为uα 的高斯积分点数目.
将uα 对应的高斯积分节点向量ûα 代入式(6)和式(7)进行相关性变换,可得相关随机变量xα 对应的高斯积分节点向量x̂α = [ x̂α,1,x̂α,2,…,x̂α,qα ]T.
得到所有变量的高斯积分点向量和高斯积分权值向量后,可将多项式基的展开系数表示为:
基于多项式基的性质,可获得Y (x ) 的均值和标准差分别为:
UAPCE法分析流程如图2所示.
3 PMS 稳健性优化
3.1 优化子目标权重
PMS是多输出响应系统,其优化设计属于多目标优化问题. 在传统的PMS多目标优化中,各优化子目标的权重仅由主观意识决定,缺乏客观准则. 本文基于响应相关性分析结果,采用相关系数赋权法[14]确定各子目标的客观权重. 响应Yα 与其他响应相关程度的均值为:
式中:N 为响应总个数.
响应之间的相关性越大,则在权重体系中所占比重越小,可认为权重δˉα 与相关性有如下关系:
δˉα = 1/δα (19)
进行归一化处理,得到响应Yα 的客观权重vα 为:
3.2 稳健性优化
对于横置电驱总成,电机沿绕电机轴中心线的旋转(Pitch)方向输出扭矩,而电机转子的动不平衡主要集中在X 和竖直(Bounce)方向. 因此,X 方向、Bounce 方向和Pitch 方向为当前研究主要关注方向[15],本文优化重点关注这3个方向的解耦率响应.在稳健性设计中,不仅要优化响应均值,还要最小化响应标准差. 结合6 Sigma 准则和固有特性设计要求,PMS的稳健性优化模型为:
式中: edX、edB、edP、efX、efB 和efP 分别为X 方向解耦率dX、Bounce方向解耦率dB、Pitch方向解耦率dP、X 方向固有频率fX、Bounce方向固有频率fB 和Pitch方向固有频率fP 的均值;σdX、σdB、σdP、σfX、σfB 和σfP 分别为dX、dB、dP、fX、fB 和fP 的标准差;fX,min 和fX,max 分别为fX 的最小和最大设计值;fB,min 和fB,max 分别为fB的最小和最大设计值;fP,min 和fP,max 分别为fP的最小和最大设计值;t = [ t1,t2,…,tn ]T 为优化变量的名义值向量;tj为第j个优化变量的名义值;tU 和tL 分别为t 取值的上下边界向量.
4 应用算例
4.1 研究模型
以某纯电动汽车三点悬置系统为例,电驱动总成质量为74.29 kg,车身质量为906.256 kg,前后悬架非簧载质量分别为62 kg和60 kg. 表1为电驱动总成和车身的转动惯量和惯性积.表2和表3分别为电驱动总成悬置和悬架安装位置.表4为悬置三向静刚度和动刚度值. 前后悬架弹簧刚度分别为25.5 N/mm和27.4 N/mm,车轮垂向刚度为189.7 N/mm.
4.2 PMS 不确定性分析
为探究悬置刚度参数对PMS固有特性响应的影响,将悬置刚度参数处理为服从正态分布的概率变量,均值为表4中的动刚度值,标准差取均值的6%.表5给出了同一悬置刚度参数之间的相关系数,不同悬置之间的刚度参数相互独立.
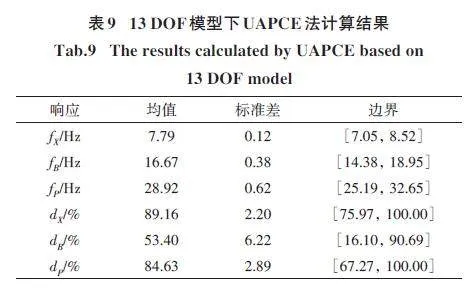
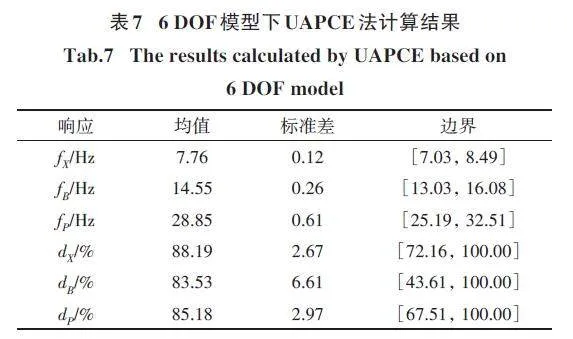
工程中常关注系统响应的取值边界. 根据6 Sigma 准则,响应的边界区间可以表示为[eYi -6σYi,eYi + 6σYi ],响应的边界区间越小,表明系统稳健性越好. 在本文方法中,忽略车身、非簧载质量、悬架以及车轮刚度时,整车13 DOF 模型可简化为传统6 DOF 模型. 表6 和表7 分别给出了6 DOF 模型下UMC法和UAPCE法计算得到的PMS固有特性响应边界. 表8和表9分别给出了13 DOF模型下UMC法和UAPCE法计算得到的PMS固有特性响应边界.
由表6和表7可知,以UMC法作为参考,在基于6 DOF模型计算固有特性响应边界时,UAPCE法的最大相对误差为0.66%. 在同一台计算机上,UMC法基于6 DOF模型求解PMS固有特性响应用时114.34 s,需要调用系统响应方程106 次;而UAPCE法求解仅用时0.67 s,需要调用系统响应方程29次(即512次).与UMC法相比,UAPCE法可减少系统响应方程调用次数约99.95%比例,减少计算时间113.67 s,降低了99.42%计算耗时.
由表8和表9可知,在基于13 DOF模型计算固有特性响应边界时,UAPCE 法的最大相对误差为0.83%. 这表明在参数含相关性的不确定情形下,UAPCE法能很好地预测系统响应边界. 在同一台计算机上,UMC法基于13 DOF模型求解PMS固有特性响应用时277.56 s,需要调用系统响应方程106次;而UAPCE 法求解仅用时0.78 s,需要调用系统响应方程29次,这表明UAPCE法可以极大地降低系统响应方程的调用次数,节约计算时间. 此外,UAPCE法基于13 DOF模型进行PMS固有特性响应计算时,最大相对误差和计算耗时较6 DOF模型增加,但仍然具有较高计算精度和效率.
基于6 DOF 模型和基于13 DOF 模型计算得到的fX、fP和dP的响应边界非常接近,基于13 DOF模型计算得到的fB响应边界比基于6 DOF模型计算得到的响应边界整体升高. 基于13 DOF模型计算得到的dX响应下边界比基于6 DOF模型计算得到的dX响应下边界更高,dB响应边界则整体降低. 这主要是由于悬置系统Bounce方向和车身存在一定的能量耦合.当悬置系统在Bounce方向振动时,会有部分振动能量分布于车身的自由度方向上,从而导致悬置系统Bounce方向解耦水平下降. 总体而言,Bounce方向固有特性受整车参数的影响较大,13 DOF分析模型得到的悬置系统固有特性更符合整车环境下的振动情况.
4.3 PMS 相关性分析
进一步探究不确定参数的相关性对PMS响应相关性的影响. 分析过程中令同一悬置三向刚度之间的相关系数分别为0、0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9、0.999 9. 图3给出了不同情况下,UAPCE法和UMC法基于6 DOF模型和13 DOF模型计算dX、dB和dP之间的相关系数结果.
由图3可以看出,UAPCE法求得各响应之间的相关系数曲线与UMC法求得的参考曲线具有很好的一致性. 这表明在计算响应相关性时,UAPCE法具有较高的计算精度,可以很好地预测系统响应之间的相关性.
基于6 DOF 模型进行分析时,X 和Bounce方向解耦率之间的相关系数ρdX dB、X 和Pitch方向解耦率之间的相关系数ρdX dP、Bounce和Pitch方向解耦率之间的相关系数ρdB dP 随输入参数相关性的增加而增加.基于13 DOF模型进行分析时,ρdX dB 和ρdB dP 随输入参数相关性的增加而降低,ρdX dP 随输入参数相关性的增加而增加. 分析表明,基于6 DOF模型得到的ρdX dP 与13 DOF模型的计算结果具有相近的数值和一致的变化趋势. 基于6 DOF 模型得到的ρdX dB 和ρdB dP 则与13 DOF模型的计算结果有不一致的数值和变化趋势. 这说明,基于6 DOF模型不能很好地开展整车环境下PMS响应的相关性分析,其分析结果可能存在较大误差.
此外,不同响应之间的相关性受输入参数相关性的影响有较大差异,在工程实际中可结合具体设计需求对悬置刚度参数相关性进行配置和控制. 例如,若要降低dB与dP之间的相关性,需要尽可能地提高刚度参数之间的相关系数;若想要降低dX与dP之间的相关性,则需尽可能地降低刚度参数之间的相关性. 橡胶悬置刚度参数的相关性通常与悬置的结构形状和材料属性有关.
4.4 PMS 稳健性优化
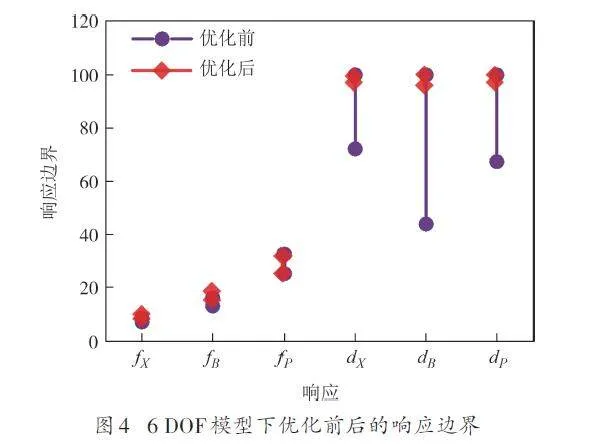
取表4中悬置刚度的均值作为优化变量的初始名义值,标准差取均值的6%,优化取值范围为初始名义值的0.5~2.5倍. X 方向、Bounce方向和Pitch方向的权重根据式(18)~式(20)计算得到. 基于6 DOF模型计算得到的X 方向、Bounce方向和Pitch方向的权重分别为0.50、0.26和0.24. fX,min 和fX,max 分别设定为7 Hz 和12 Hz,fB,min 和fB,max 分别设定为13 Hz 和23 Hz,fP,min 和fP,max 分别设定为24 Hz和36 Hz. 基于6 DOF模型建立PMS稳健性优化模型,优化结果如图4所示.
由图4可知,优化后的固有频率响应边界没有明显变化,解耦率响应边界显著缩窄. 其中,优化后dX、dB 和dP 均值分别由88.19%、83.53% 和85.18% 提高至98.27%、99.17% 和98.52%。通过计算可知dX、dB和dP标准差分别由2.67、6.61和2.97降低至0.21、0.54和0.24. 在同样的不确定性和相关性情形下,解耦率均值相比优化前有较大提高,标准差明显降低,这说明系统参数不确定性对解耦率的影响显著降低. 将基于6 DOF 模型的优化结果代入13 DOF 模型,得到的计算结果如表10所示.
由表10 可知,dX、dB 和dP 均值分别由98.27%、99.17%和98.52%降低至90.27%、80.66%和98.40%,标准差分别由0.21、0.54和0.24增加至11.71、1.02和0.32. 这说明基于6 DOF模型的优化结果,在13 DOF模型中稳健性大幅下降,其中dX和dB的稳健性下降最多. 这说明基于6 DOF模型,无法保证整车环境下优化结果性能的稳健性.
基于13 DOF模型计算得到的X 方向、Bounce方向和Pitch方向的权重分别为0.34、0.32和0.34. 根据上述分析,可基于13 DOF模型建立PMS稳健性优化模型,优化结果如图5所示.
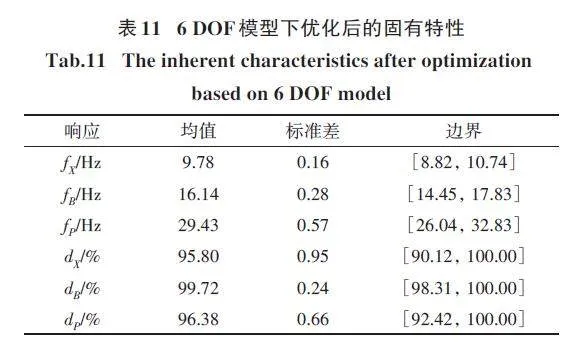
由图5可知,优化后的固有频率响应边界没有明显变化,解耦率响应边界显著缩窄. 其中,优化后dX、dB 和dP 均值分别由89.15%、53.40% 和84.62% 提高至95.40%、81.66% 和96.33%,标准差分别由2.25、6.19和2.91降低至0.84、0.18和0.69. 在同样的不确定性和相关性情形下,解耦率均值相比优化前有较大提高,标准差明显降低,这说明系统参数不确定性对解耦率的影响显著降低. 将基于13 DOF模型的优化结果代入6 DOF模型,得到的计算结果如表11所示.
由表11 可知,dX、dB 和dP 均值分别由95.40%、81.66%和96.33%提高至95.80%、99.72%和96.38%,标准差分别由0.84、0.18和0.69变化至0.95、0.24和0.66. 这表明基于13 DOF模型的优化结果,在6 DOF模型中稳健性无明显变化. 因此,相较于6 DOF 模型,基于13 DOF 模型得到的优化结果有更好的稳健性.
5 结 论
1)以UMC法为参考,UAPCE法计算纯电动汽车PMS响应均值、标准差、边界范围以及相关性时具有较高的计算精度和计算效率.
2)在不确定性分析方面,基于13 DOF模型计算得到的Bounce 方向响应边界更合理. 对于其他方向,基于两种模型均能求得较合理的响应边界.
3)在相关性分析方面,基于6 DOF模型不能很好地开展整车环境下PMS响应的相关性分析,其分析结果可能存在较大误差.
4)在稳健性优化方面,基于13 DOF模型得到的优化结果可以保证整车环境下优化结果性能的稳健性,比基于6 DOF模型得到的优化结果具有更好的稳健性.
参考文献
[1] CAI B H,SHANGGUAN W B,LÜ H. An efficient analysis andoptimization method for powertrain mounting systems involvinginterval uncertainty [J]. Proceedings of the Institution ofMechanical Engineers,Part D:Journal of Automobile Engineering,2020,234(5):1318-1329.
[2] XIN F L,QIAN L J,DU H P,et al. Multi-objective robustoptimization design for powertrain mount system of electricvehicles[J]. Journal of Low Frequency Noise,Vibration andActive Control,2017,36(3):243-260.
[3] TRNG N H,DAO D N. New hybrid between NSGA- Ⅲ withmulti-objective particle swarm optimization to multi-objectiverobust optimization design for Powertrain mount system of electricvehicles[J].Advances in Mechanical Engineering,2020,12(2):168781402090425.
[4] WU J,LIU X D,SHAN Y C,et al. Robustness optimization ofengine mounting system based on Six Sigma and torque roll axisdecoupling method [J]. Proceedings of the Institution ofMechanical Engineers,Part D:Journal of Automobile Engineering,2019,233(4):1047-1060.
[5] 刘春梅,黄德惠,郑成,等.动力总成悬置系统的可靠设计[J].中国机械工程, 2020,31(21):2529-2534.
LIU C M,HUANG D H,ZHENG C,et al. Reliable design ofPMSs[J].China Mechanical Engineering,2020,31(21): 2529-2534.(in Chinese)
[6] 吴杰, 郝世武. 汽车动力总成悬置系统固有特性的可靠性优化[J].汽车工程,2013,35(9):841-846.
WU J,HAO S W. Reliability optimization on the naturalcharacteristics of vehicle powertrain mounting system [J] .Automotive Engineering,2013,35(9):841-846.(in Chinese)
[7] 谢展,于德介,李蓉,等.基于区间分析的发动机悬置系统稳健优化设计[J].汽车工程, 2014, 36(12): 1503-1507.
XIE Z,YU D J,LI R,et al.Robust optimization design of enginemount systems based on interval analysis[J]. AutomotiveEngineering, 2014, 36(12): 1503-1507.(in Chinese)
[8] CAI B H,SHANGGUAN W B,LÜ H. An efficient analysis andoptimization method for the powertrain mounting system withhybrid random and interval uncertainties [J]. EngineeringOptimization,2020, 52(9): 1522-1541.
[9] LÜ H,ZHENG Z B,HUANG X T,et al. A methodology fordesign optimization of powertrain mounting systems involvinghybrid interval-random uncertainties [J]. Structural andMultidisciplinary Optimization, 2021, 63(3): 1265-1285.
[10] 吕辉,李振聪,杨坤, 等.纯电动汽车悬置系统固有特性的不确定性和相关性传播分析[J].振动工程学报,2023,36(3):671-679.
LÜ H,LI Z C,YANG K,et al. Uncertainty and correlationpropagation analysis for the inherent characteristics of powertrainmounting systems of battery electric vehicles[J]. Journal ofVibration Engineering,2023,36(3):671-679.(in Chinese)
[11] SHANGGUAN W B,LIU X A,LÜ Z P,et al. Design method ofautomotive powertrain mounting system based on vibration andnoise limitations of vehicle level[J]. Mechanical Systems andSignal Processing,2016,76:677-695.
[12] ZHANG Y,XU J,DONG Y. Reliability analysis with correlatedrandom variables based on a novel transformation,adaptivedimension-reduction and maximum entropy method [J] .Computers amp; Structures,2023,274:106919.
[13] ZHU W Q,HU Y B,CHEN N,et al. A fuzzy and randommoment-based arbitrary polynomial chaos method for responseanalysis of composite structural-acoustic system with multi-scaleuncertainties[J].Applied Acoustics, 2021, 177: 107913.
[14] 王晓玲,戴林瀚,吕鹏,等.基于DSR-可拓云的渗流安全综合评价研究[J].天津大学学报(自然科学与工程技术版),2019,52(1): 52-61.
WANG X L, DAI L H,LÜ P, et al. Study on comprehensiveevaluation model of seepage safety based on DSR-extension cloud[J].Journal of Tianjin University (Science and Technology), 2019,52(1): 52-61.(in Chinese)
[15] 李汶哲,毛海宽,吕辉.电动车动力总成悬置系统的可靠性分析方法[J].湖南大学学报(自然科学版),2023,50(4):55-64.
LI W Z,MAO H K,LÜ H. A reliability analysis method forpowertrain mounting systems of electric vehicles[J]. Journal ofHunan University (Natural Sciences), 2023, 50(4):55-64.(inChinese)
基金项目:国家自然科学基金资助项目(52375093), National Natural Science Foundation of China(52375093); 广东省自然科学基金资助项目(2023A1515011585), Natural Science Foundation of Guangdong Province(2023A1515011585)
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16 00:28:32
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
系统管理学报(2018年2期)2018-08-13 01:04:48
电子制作(2017年20期)2017-04-26 06:57:35
海外星云(2016年17期)2016-12-01 04:18:42
电子制作(2016年11期)2016-11-07 08:43:35
现代工业经济和信息化(2016年1期)2016-05-17 05:33:51
中国资源综合利用(2016年2期)2016-01-22 07:27:46
电源技术(2015年1期)2015-08-22 11:15:42
电源技术(2015年9期)2015-06-05 09:36:06