基于无权重神经网络的感应电机故障检测与识别方法
2025-02-20 00:00:00冯光明王有行高珍
科技创新与应用 2025年5期





摘" 要:该文提出一种新型多类、多参数、基于实值无权重神经网络的分类器,用于故障检测与识别。与传统的无权重神经网络相比,所提方法不仅能够处理多类识别,接受实值输入特征,还具有显著提升的识别和泛化能力。该方法的主要创新包括改进的输入到地址映射策略,使其适用于判别单元的地址分配,以及基于相似性度量的成员值的有效内存扩展方案。开发的分类器应用于单相和三相感应电机的故障检测与识别。该文还对方法的设计参数变化进行敏感性分析,并对电机的多种故障进行诊断。实验结果表明,该方法在单相和三相感应电机故障识别中的最高准确率分别达到了99.6%和89.25%。
关键词:故障识别;电动机检测;无权重神经网络;分类器;识别方法
中图分类号:TM615" " " 文献标志码:A" " " " " 文章编号:2095-2945(2025)05-0043-07
Abstract: This paper proposes a new multi-class, multi-parameter classifier based on real-valued unweighted neural network for fault detection and identification. Compared with traditional unweighted neural networks, the proposed method can not only handle multiple types of recognition and accept real-valued input features, but also has significantly improved recognition and generalization capabilities. The main innovations of this method include an improved input-to-address mapping strategy that makes it suitable for addressing unit allocation, and an efficient memory expansion scheme based on member values based on similarity measures. The developed classifier is applied to fault detection and identification of single-phase and three-phase induction motors. This paper also carries out sensitivity analysis on changes in design parameters of the method, and diagnoses various faults of the motor. Experimental results show that the highest accuracy of this method in single-phase and three-phase induction motor fault identification reaches 99.6% and 89.25% respectively.
Keywords: fault identification; motor detection; weightless neural network; classifier; recognition method
工业电机在运行过程中会遭遇各种故障,故障原因由系统组件的完全或部分损坏导致[1-3]。机器的故障行为通常通过传感器数据表现出来,例如电流、振动和声学信号[4-6]。开发故障诊断系统首要步骤是获取系统表现和故障行为先验知识。基于模型的方法通过显式数学模型来表示系统知识和故障行为,而数据驱动方法则隐含这些知识信息。本研究重点探讨使用无权重神经网络(WNN)数据驱动方法对工业电机进行故障检测和识别。
无权重神经网络(WNN)是一种具有功能性且不直接依赖激活函数和权重的神经网络[7]。原始的无权重神经网络作为接受二进制输入和输出的人工神经元,节点之间没有权重。这类神经网络模型的结构被描述为一组寄存器(即随机存取存储器“RAM”),其根据输入模式在特定地址位置存储数据。与传统人工神经网络(ANN)范式中的权重调整方法不同[8],WNN的学习通过写入/更改地址位置的内容来实现。此外,大多数传统的人工神经网络需要经历许多训练周期[9]。训练周期通常相当长,并假设在学习阶段输入数据不会发生变化,这对于需要快速响应的实时动态系统是不利的。在这种情况下,单周期神经网络更为有利。WNN中的一次学习周期意味着相比多周期学习方法,可以大幅缩短时间。
基于RAM的分类器本质上通过二进制输入和输出进行识别,早期基于RAM的分类器被称为n-tuple识别系统[10]。n-tuple神经元方法基于记忆输入模式,当n-tuple输入地址线被放置在RAM上时,一个值会存储在指定地址。尽管这种方法简单,但在实际应用中并不实用,因为在测试过程中,神经元只是检查输入模式是否已被存储,RAM神经元能够记忆存储的模式,但缺乏泛化能力。文献[11]中引入了更稳定和通用的n-tuple网络概念,基于一组并行工作的神经元(RAM)组成了一种鉴别器,每个神经元负责学习更大输入模式的一个子集。每个神经元单元的输入子模式分配通过随机创建的输入-神经元映射进行,这种映射在学习和识别阶段都使用。在子模式输入学习过程中,每个RAM对应于各自子模式输入的地址位置存储值。在识别阶段,分析每个RAM单元的输出,并将这些RAM位置存储的值相加。通过这种分级输出,判别器能够识别训练模式的相似但不同的版本,从而展示出泛化能力。
为了实现多类识别,提出了一种称为WiS-ARD网络的模块化RAM判别器架构[12]。WiS-ARD网络是由多个判别器组成的数组,每个判别器代表不同的模式类别。每个判别器单元针对各自的类别模式进行训练。输入模式的类别识别通过分析和比较每个判别器的输出来完成,输出最高分级值的判别器被选为胜出判别器,输入模式被分配为胜出判别器的类别标签。
目前的研究涉及二进制无权重神经网络(WNN)的修改,包括概率逻辑节点(PLN)、多状态PLN(MPLN)[13-14]和广义随机存取存储器(GRAM)[15]。然而,该领域的主要挑战在于地址生成方法。在实际应用中,输入数据通常是实值数,因此在WNN中需要一个输入到地址映射阶段,因为判别单元只能处理二进制值输入。输入到地址的映射,尤其是地址生成方法,对WNN的识别和泛化性能有着极其重要的影响。与遗传算法编码过程中的实值到二进制字符串编码方法不同,这种简单的方法在WiS-ARD中并不适用,并可能导致判别器功能失效。这是因为WiS-ARD中的判别器设计为将相似实例表示为相似的二进制字符串,而简单实值到二进制转换无法实现这一点。
本文提出了一种新型基于无权重神经网络(WNN)的分类器,能够处理具有实值输入特征的多类识别。所提方法强调在RAM位置有效分配输入模式地址,并通过引入改进的RAM(mRAM)提高输入的泛化能力。改进的RAM通过成员值将训练输入数据的识别区域扩展到最近的地址位置。在这些存储的mRAM位置的最近地址位置分配一个类别成员值,表明输入模式在训练阶段不可用时属于相应类别的可能性。计算一个聚合的成员值并与阈值进行比较,以决定未见过的测试数据(之前未存储的输入模式)是否属于相关类别。该方法在PC上对2个不同的数据集进行了实现,并与该领域的最新技术进行了比较。特别是,采用了2种不同的硬件实验设置来创建用于感应电机故障检测和识别的数据集。训练好的分类器能够诊断来自不同机器的多种故障,开发的方法在2个不同的感应电机数据集上进行了性能评估。
1" 方法
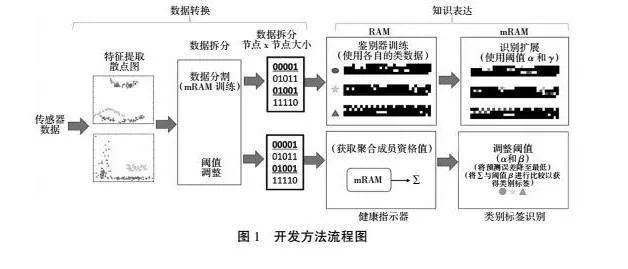
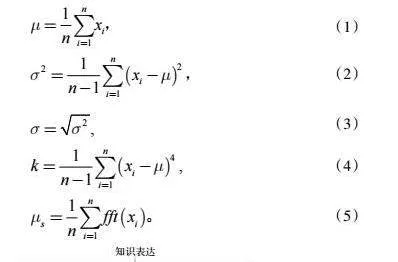
本节讨论了所提出的故障检测和诊断方法,该方法采用了一种改进实值多参数无权重神经网络(WNN)分类器来实现多类识别。图1展示了流程图,并解释了不同阶段的数据处理过程。具体而言,训练数据集被分为2部分:一部分用于mRAM训练;另一部分用于阈值调整。这种数据分割技术用于微调超参数,以提高WNN的性能,从而尽量减少预测类标签与实际类标签之间的误差。首先,利用关于故障类型和数据标签的先验知识来确定判别单元。随后将有用的信号信息转化为故障特征/模式。这些特征的计算数学表达式如下
接下来使用这些相应特征和数据标签对每个类别进行判别器训练。在此过程中通过所提出的输入到地址映射方法转化为RAM位置地址,并根据所提方法对mRAM进行训练。通过每个判别器的训练,当判别器接收到一个输入时,会得到一个聚合成员值(AMV),该值作为健康指示器,用于类别标签识别。AMV通过与阈值比较,传达关于类别标签的信息。每个阶段的具体细节将在后文说明。
1.1" 输入到地址映射
所提出的实值无权重神经网络(WNN)的架构如图2所示,该架构适用于判别单元中的地址分配。在所提的多参数WNN中,输入的d维实值向量表示(其中d表示多参数/特征)被映射到RAM地址位置。输入到地址的映射方法包括2个阶段,将d维实值向量转换为判别单元内每个神经元单元(即节点)的RAM地址。所提出的输入到地址映射过程如图3所示。
首先,将d维实值向量在整数范围(0到2n-1)内进行归一化处理,其中“n”定义了十进制转二进制的细节级别,范围内的每个整数值对应于特定的n位二进制模式。对于十进制到二进制的转换,采用了二进制反射格雷码(BRGC)表示法。BRGC表示法适用于判别单元内节点的地址分配,并且避免了将2个接近的值映射到非常不同的RAM地址。BRGC阶段的结果是一系列二进制字符串(d×n),将被分割成子串以获取判别单元的子地址。比特填充阶段被引入,以避免节点的子地址分配中的冲突,如下所示
随后,将一系列二进制字符串分成子串(#nodes),每个子串具有节点大小的位长度。这些子串表示在判别器节点中要访问的地址。与WiS-ARD不同,所提出的输入到地址映射方法导致将相似的实例映射到相似的RAM地址位置,并且适用实值、多参数/特征输入数据。
1.2" 改进的WNN网络架构
本节描述了WNN的架构,如图4所示,结合了一个稳健的输入模式学习方案,该方案能够从输入训练集中概括信息,并使用聚合成员值来确定新输入模式的类别。所提出的多类WNN框架由“m”个判别器组成,每个类别对应一个判别器。每个判别器由若干RAM节点组成,RAM节点的数量和每个节点的大小分别用#nodes和node_size表示。最初,所有判别单元中的节点内容均初始化为零。在训练过程中,每个位置的RAM节点内容会根据特定的子地址进行修改。训练过程分为2个阶段。在训练阶段I中,d维实值输入训练数据使用所提出的输入到地址映射方法转化为子地址。对每个类别,使用该类别的训练实例进行判别器训练。对于每个实值训练实例,根据输入到地址映射得到的子地址,将特定节点位置的内容修改为“1”。对所有类别的判别器均重复此过程,使用各自类别的训练实例。训练阶段I完成后,RAM节点的内容要么为“1”,要么为“0”,表示相应节点地址的二进制成员值。
在训练阶段II中,输入模式学习方法将概括RAM节点中的信息,并扩展判别器节点地址的识别区域。扩展过程从聚类值为“1”的RAM节点地址开始。计算每个聚类的中心点,并通过存储新的成员值来修改最接近聚类中心的RAM节点位置的内容。基于聚类中心地址和其他单元地址(存储值为“0”)之间的汉明距离,更新mRAM节点位置的内容。每个mRAM节点的内容更新如下所示
其中,α是控制识别区域扩展的阈值;γ是缩放因子。识别区域的扩展与地址位置和之前存储的输入模式地址位置的相似性度量成比例。更高的类别成员值分配给最接近聚类中心的地址位置,这些地址位置显示输入模式属于相应类别的可能性。如果输入训练数据有限,mRAM节点的识别区域扩展会导致更好的输入模式泛化。
1.3" 识别
输入模式的聚合成员值通过求和判别器内每个节点的成员值计算得到。对于包含在相应类别训练实例中的输入模式,相关判别器的聚合成员值与节点总数相同。此外,对于相似的输入模式(不包括在训练集中),相关判别器的聚合成员值可能在0到节点总数之间。如果WNN设计得当,聚合成员值将更高且接近节点总数。对于类别标签识别,新的输入数据的聚合成员值在每个判别器内计算,并与决定未见(之前未存储)输入模式是否属于相应类别的阈值(β)进行比较。对于一个输入模式,如果多个判别器的聚合成员值超过阈值(β),则选择聚合成员值最高的判别器作为获胜判别器,并将其类别标签分配给输入模式。简而言之,根据基于判别器的机器行为知识表示,故障可以定义如下。
用于检测故障“A”(其中A是故障类型之一):鉴别器β的AMV和鉴别器“A”的AMV=max j(第j个鉴别器的AMV)。
2" 实施
本研究聚焦于单相和三相感应电机中不同故障的检测和识别。这些故障以断裂转子条、轴承故障、不平衡负载和鼠笼断环的形式载入系统。这些故障的原因为通过对上述机械部件进行机械损伤而产生的部分机械部件故障。所开发的WNN专注于数据驱动的故障诊断,不需要对故障进行数学建模。相似于数据驱动的方法,本文获取了正常和故障电机的传感器数据,并从获取的传感器数据中提取了故障特征。并讨论了开发的WNN分类器的实现、用于创建数据集的硬件实验设置以及故障类型。
2.1" 单相感应电机设置
实验装置包括一个1/2马力、220 V的鼠笼式感应电机、负载、加速度计振动传感器(ADXL335,300 mV/g)、电流传感器(ACS712ELCTR,100 mV/A)、数据采集系统和控制器,如图5所示。电流和振动传感器的输入范围分别为20 A和±3 g。传感器连接到Arduino板,该板以8.33 kHz的采样率从传感器收集原始数据并存储在其内部存储器中。Arduino通过串口连接到计算机,提供MATLAB接口进行进一步处理。系统的3种真实状态被分析:健康状态、轴承故障(球损坏)和负载故障(负载不平衡组件)。2个有缺陷的组件如图5所示。原始数据(电流和振动信号)的示例如图6所示。
为了实现所开发的方法,分别收集了3种状态下的电流和振动信号样本。在数据集1中,共获得了180个信号样本(即每种电机状态60个样本)。对于每个样本,进行特征提取,提取了4个特征,包括电流的均值和标准差以及振动的均值和标准差(μI,σI,μV和σV)。特征提取的结果是获得了180个d维实值输入向量(d=4)。数据集的三分之二(即120个特征向量)用于分类器训练。根据不同的电机运行速度(即3个级别)和电机状态(健康和2种故障),训练WNN判别器。对于特定的运行速度和电机状态,获得了40个训练样本,总计120个样本。其余三分之一的实值输入向量(即60个特征向量)用于测试和性能评估。
2.2" 三相感应电机设置
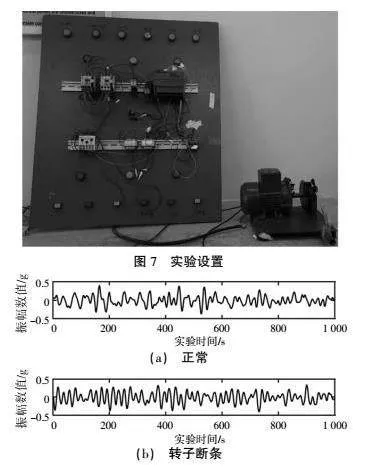
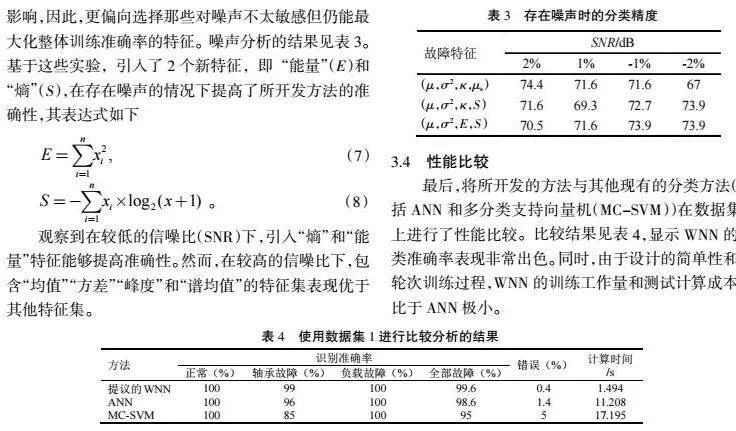
实验装置包括一个0.55 kW、220 V的三相感应电机,其操作参数如下:频率为50 Hz、转子速度为1 400 r/min和电流为2.52/1.47 A(Δ/Y),如图7所示。分析了4种三相感应电机的状态:健康的三相感应电机、鼠笼环损坏的三相感应电机、转子条断裂的三相感应电机和2个转子条断裂的三相感应电机。为了进行基于声学的故障诊断,使用了数字录音设备(范围:20 Hz~20 kHz)。其他参数包括格式:WAVE,采样频率44 100 Hz,16位,单声道,全向麦克风。然后,在PC上使用MATLAB处理录制的声音,具体过程包括将声音拆分成较小的1秒音频文件,在[-1,1]范围内进行归一化,接着进行特征提取。原始数据(声学信号)的示例如图8所示。在数据集2中,获得了440个信号样本(即每种电机状态110个样本)。对于每个样本,进行特征提取,提取了4个特征,包括声学信号的均值、方差、峰度和谱均值(μ,σ2,?资,μs)。特征提取的结果是获得了440个d维实值输入向量(d=4)。总共400个特征向量用于分类器训练,剩余的40个特征向量用于测试和性能评估。
3" 结果和讨论
本节介绍了输入到地址映射的设计参数和鉴别器的详细信息。首先,讨论了数据集1(单相感应电机)中设计参数变化的敏感性分析结果。此外,展示了所开发方法在数据集2(三相感应电机)中的故障识别性能。接下来,研究了在数据集2中引入噪声的情况,并对所开发方法与其他分类器的性能进行了比较。
3.1" 使用数据集1进行敏感度分析
本文验证了所开发的多类、多参数实值WNN在感应电机故障检测和识别中的性能。为了研究设计参数(特别是节点数量、节点大小、十进制到二进制转换的详细级别等)对所开发方法性能的敏感性和影响,通过改变设计参数进行了不同的实验,实验细节总结在表1中。对于每组实验,训练和测试过程重复20次,并获得平均故障识别准确率和误分类错误率。值得注意的是,通过增加节点数量,可以提高分类器的泛化能力,使平均分类识别率提高,但同时误分类错误也会增加,反之亦然。通过试验和错误的方法,可以在准确分类识别和误分类错误之间找到合理的平衡。此外,二进制表示的位数和节点大小的最佳值取决于输入数据的分布。如果类别间和类别内数据分布具有较大偏差和较小方差,则较小的“n”和较小的节点大小可能是有效的。否则,如果类别间存在重叠,则应选择适当的“n”值以捕捉数据分布的细微差异。
然而,在获得节点数量、节点大小和“n”的最佳值后,进一步增加或减少这些值并不会改善分类性能。同样,在训练阶段II中,识别区域扩展的阈值“α”值较高会导致过拟合,而较小的值可能导致分类器的欠拟合。阈值“β”的值取决于鉴别器中的节点数量,范围在(0, #nodes)之间。较小的“β”值可能会导致更好的类别识别准确性,但同时误分类错误也会增加。对于每组实验,阈值和缩放因子的选择是通过试验和错误的方法确定的。
3.2" 使用数据集2进行故障识别
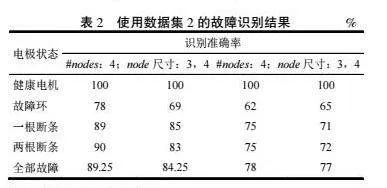
本节验证了所开发的实值WNN在使用声学信号进行三相感应电机故障检测和识别中的性能。从收集到的声学信号中提取了4个特征,包括声学信号的均值、方差、峰度和谱均值(μ,σ2,?资和μs)。为了研究所开发方法的故障识别性能,进行了不同的实验以确定设计参数,这些参数分别是d=4,m=4,n=4。训练和测试过程重复进行了20次,获得了平均故障识别准确率和误分类错误率。缩放因子γ和阈值α及β分别为1.5,2,3。实验结果总结见表2。
3.3" 噪声影响下的结果
在本节中尝试在数据集2中引入噪声并研究其影响。观察到在存在噪声的情况下,特征选择过程会受到影响,因此,更偏向选择那些对噪声不太敏感但仍能最大化整体训练准确率的特征。噪声分析的结果见表3。基于这些实验,引入了2个新特征,即“能量”(E)和“熵”(S),在存在噪声的情况下提高了所开发方法的准确性,其表达式如下
观察到在较低的信噪比(SNR)下,引入“熵”和“能量”特征能够提高准确性。然而,在较高的信噪比下,包含“均值”“方差”“峰度”和“谱均值”的特征集表现优于其他特征集。
3.4" 性能比较
最后,将所开发的方法与其他现有的分类方法(包括ANN和多分类支持向量机(MC-SVM))在数据集1上进行了性能比较。比较结果见表4,显示WNN的分类准确率表现非常出色。同时,由于设计的简单性和单轮次训练过程,WNN的训练工作量和测试计算成本相比于ANN极小。
4" 结论和展望
本文重点开发了一种基于无权神经网络的分类器,用于工业电机的故障检测和识别。所开发的方法具有处理实值输入特征的多类识别能力,并结合了改进的mRAM来提升识别和泛化能力。训练过程包括2个阶段:①通过识别区域扩展对mRAM进行训练;②阈值调节。mRAM的设计涉及一次训练,因此训练性能取决于输入特征的分布。在提出的方法中,引入了有效的输入到地址映射和识别区域扩展。然而,为了提高分类准确性,阈值调节是手动进行的。所开发的WNN用于单相和三相感应电机的故障检测和识别。进行了方法设计参数和阈值变化的敏感性分析。此外,使用性能指标(准确性、误分类错误、计算时间)对开发的WNN与多类支持向量机(MC-SVM)和人工神经网络(ANN)进行了比较研究。结果表明,所开发的方法在故障识别方面快速且准确。未来计划研究该方法在实时故障和逐步失效分析中的性能,并且进一步研究噪声对传感器数据采集和分类器训练的影响。
参考文献:
[1] 张国强,杜锦华.永磁同步电机无位置传感器控制技术综述[J].电机与控制应用,2024,51(1):1-13.
[2] 高卫民,彭钢,黎雄,等.基于三相交流调压器的无刷同步电动机励磁电流控制[J].广东电力,2022,35(8):76-85.
[3] 汪兆巍,武志刚.基于多项式演化模型的永磁同步电机参数辨识[J].广东电力,2020,33(6):73-82.
[4] 王健,宋宇轩,吴炜,等.大型交流电机绝缘在线监测方法研究进展[J/OL].华北电力大学学报(自然科学版),1-13[2025-01-22].http://kns.cnki.net/kcms/detail/13.1212.TM.20240412.2115.0 04.html.
[5] 严如强,商佐港,王志颖,等.可解释人工智能在工业智能诊断中的挑战和机遇:先验赋能[J].机械工程学报,2024,60(12):1-20.
[6] 叶明.永磁同步电机非稳态工况轴承故障诊断技术研究[D].杭州:浙江大学,2023.
[7] 蔡子育,于新红,许立斌,等.基于级联扩张状态观测器的VIENNA整流器无权重无模型预测控制[J].电力系统及其自动化学报,2024,36(12):11-18.
[8] 赵斌财,林骞,于凯,等.基于神经网络的变压器故障声识别研究[J].自动化技术与应用,2023,42(7):16-19.
[9] 李洪赭,陈建译,闫连山,等.基于WiSARD无权重神经网络的铁路信号系统入侵检测方法研究[J].铁道学报,2023,45(7):72-80.
[10] 彭宏京,陈松灿.人脸识别的Boosting N-Tuple网络方法[J].模式识别与人工智能,2005,18(4):453-458.
[11] 李松斌,王凌睿,刘鹏,等.一种基于运动矢量空间编码的HEVC信息隐藏方法[J].计算机学报,2016,39(7):1450-1463.
[12] 潘慧英.UG结合Mold Wisard模块半自动分模优点[J].机械工程师,2013(8):165-166.
[13] 董正琼,李晨阳,唐少康,等.基于多状态故障树的舰船装备可靠性分析方法[J].火力与指挥控制,2023,48(4):59-64.
[14] 王长伟,招永锦,吴晗,等.考虑新型配电元件多状态可靠性模型的配电网可靠性评估[J].供用电,2023,40(4):74-82.
[15] 高雅田,贾斯淇.基于Gram-Schmidt正交化和HSIC的核函数选择方法[J].计算机技术与发展,2024,34(6):148-154.
猜你喜欢
电子测试(2018年1期)2018-04-18 11:52:35
中国绿色画报(2016年7期)2016-12-26 18:15:00
中国新技术新产品(2016年23期)2016-12-26 09:40:00
科技创新与应用(2016年33期)2016-12-17 15:43:11
现代情报(2016年10期)2016-12-15 11:50:53
电子技术与软件工程(2016年18期)2016-11-14 23:17:54
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
考试周刊(2016年78期)2016-10-12 12:48:43
电子与信息学报(2014年10期)2014-11-18 03:15:16