
地震监测站点巡检最优路线规划软件设计与开发
2025-02-16 00:00:00张伟峰潘洁樊冬孙亮亮赵桂宝李惊生
地震科学进展 2025年2期
关键词:软件设计



[摘要] " "随着地震监测工作的日益重要,巡检路线的规划对于提高巡检工作效率和确保产出准确连续的观测数据具有关键作用。本文通过介绍地震监测站点巡检的重要性和现有巡检方式的局限性,探讨地震监测站点巡检最优路线规划软件的设计与开发。文中阐述了软件的设计理念、主要功能和技术实现,对关键模块的设计进行了详细说明,指出优化巡检线路过程中应特别注意的问题,并展望了软件未来的应用前景。该软件的成功开发和应用,将为地震监测站点的巡检工作提供强有力的技术支持,同时也为其他领域的巡检路线规划提供了有益的参考。
[关键词] 中心站运维; 站点巡检; 最优路径算法; Python; 软件设计
[DOI] 10.19987/j.dzkxjz.2023-167
基金项目: 中国地震局监测、预报、科研三结合课题资助。
0 "引言
随着“国家地震烈度速报与预警工程”的实施,以及国家、省级、中心站三级管理模式的确立,每个地震监测中心站所管辖的站点数量通常有几十个之多。中心站负责辖区内的所有一般站的运维工作[1]。为了让所有仪器能产出连续、可靠的观测数据,需要定期派运维人员到站点进行巡检。经过长时间的运维后,虽然对线路和住宿情况已经比较熟悉,但是在实际巡检过程中,还是会因为天气状况、交通情况等原因,出现绕路或者到达站点后因时间原因无法完成当日的巡检任务等问题。
地震监测站点巡检最优路线规划软件结合地理信息系统(GIS)、最优路径算法等技术,根据要巡检的各站点天气情况、道路交通情况等多个动态特性,能够智能设计出一个最优化路径,提高巡检效率,降低巡检成本,对中心站运维人员巡检路线规划提供很大的帮助。
本文阐述了地震监测站点巡检最优路线规划软件的架构、功能和结构的设计,对地图获取及站点标记、路线规划等主要功能模块进行了介绍,分析了软件的主要特点。
1 "软件的设计
1.1 "设计思路
软件采用分层架构,应用地理信息系统、高德在线地图API、最优路径算法等技术,实现地震监测站点巡检路线规划功能,以及地图显示、天气和交通分析等功能,从而提高监测站点巡检效率。
1.2 "架构设计
软件采用分层架构,主要包括运行环境层、数据存储层、管理层、业务应用层、接口层、展示层等(图1)。
软件主要由展示前端和服务后端组成。
前端展示:使用Flutter跨平台移动开发框架进行前端开发,实现UI交互和地图展示等功能。整合高德地图SDK进行地图展示、地点搜索、路线规划等相关操作。
后端服务:使用Python后端语言和框架,提供数据存储、处理和同步等服务。数据库服务:选择MySQL数据模型来建立相应的数据库表和字段,使用MySQL数据库系统存储地震监测站点的数据、巡检任务和路线规划信息等。而且,软件采取必要的安全措施来保护用户数据和隐私,包括数据加密、访问控制和日志记录等。
1.3 "功能和模块设计
地震监测站点巡检最优路线规划软件应具备显示地震监测站点的位置和状态、帮助巡检人员快速找到目标站点的实时地图功能,并能根据地震监测站点分布,充分考虑到要巡检站点的天气情况、道路交通情况、站点巡检耗时等,从而规划最优路线,减少巡检时间的最优路线规划功能和允许巡检人员根据现场实际情况创建、查看和修改巡检任务,确保按计划进行巡检的任务管理功能。
根据C/S架构的功能设计,软件主要包括客户端和管理端,以及最优路线规划、实时地图展示等模块(图2)。
客户端主要分为地图展示、路线规划、任务管理3个模块:
实时地图展示:基于高德地图API,实时展示地震监测站点的位置、状态等信息。提供缩放、站点添加等功能,允许用户查看每个地震监测站点的位置详细信息。
最优路线规划:根据用户输入的起点和终点,结合实时路况信息和多个地震监测站点位置,规划出最优巡检路线。
任务管理与提醒:允许管理员创建和编辑巡检任务,设定巡检时间,确保巡检工作按时进行。
管理端主要分为用户管理、站点管理、任务管理设置、路线规划管理、软件设置维护等模块:
用户管理:管理员可以管理软件的用户账号,包括创建新用户、编辑用户信息和权限管理等。
站点管理:管理员可以添加、编辑和删除地震监测站点信息,包括站点位置、设备情况等。
任务管理:管理员可以创建、编辑和查看巡检任务,包括设定巡检时间、设备等信息,以及查看任务的执行情况和结果。
路线规划管理:管理员可以根据地震监测站点的位置和巡检需求,规划出最优的巡检路线,并设置相应的任务。
系统设置与维护:管理员可以对软件进行系统设置和维护,包括配置地图显示参数、设置用户权限等级。
2 "主要功能模块设计
2.1 "地图的获取及站点的标记
为了获取道路交通的实时信息,该软件使用高德在线地图。利用高德地图的搜索API来搜索地点、路线等信息。在实际的编程过程中需要在高德开发者网站的相关文档和示例代码中查找适合的SDK或库文件,根据所使用的编程语言和开发环境,下载并引入所需的高德地图SDK。使用高德开发者网站注册开发者账号时提供的API密钥进行初始化,并利用高德地图API提供的方法来加载实时地图,根据需求进行设置地图中心点、调整地图缩放级别、添加辖区内要巡检的站点标记等。
地震监测站点一般比较分散而且偏僻,大都没有标记在高德地图中[2]。站点建设初期所有站点已使用GPS测量了精确的经纬度信息,把这个经纬度在高德在线地图中输入可标记地点,程序编写过程中使用Python编程语言和高德地图的Python SDK。首先定义要标记的经纬度信息;然后通过读取一个文本文件获取高德地图的API密钥;接着构建一个包含请求参数的字典对象,其中包含API密钥、坐标类型、输出格式、API版本号、额外数据等信息,通过添加“markers”参数来指定要标记的位置;最后,使用requests库发送GET请求,并解析返回的JSON数据。如果请求成功,我们就可以获取到标记点的图片URL。
2.2 "路线的规划
获取站点的经纬度信息后,使用高德在线地图API进行路线规划。一般采用启发式搜索算法,如Dijkstra算法或A*算法,来计算巡检站点之间的最短路径。这样可以在考虑交通、巡检时间、天气、住宿等多个因素的情况下,得到一个最优的巡检路线,巡检时间因素主要包括以下几个方面。
2.2.1 "交通耗时
在高德实时地图中,使用高德地图的API和Python中的网络请求库(如requests)进行交互。在编程过程中首先设置高德地图API的key,定义起点和终点坐标,构造请求参数,包括key、起点坐标、终点坐标、交通模式等。然后,使用requests库发送GET请求,并获取响应数据。最后,我们将响应数据转换为JSON格式,并提取出交通耗时信息。
2.2.2 "巡检耗时
在计算巡检耗时的时候,可以考虑使用动态规划算法来优化时间复杂度。动态规划算法可以将问题分解为子问题,并保存子问题的解,以避免重复计算。具体来说,对于一个巡检路线,可以将其划分为多个巡检段,每个巡检段都可以是一个站点或者多个站点的集合[3]。对于每个巡检段,可以预先计算出巡检该段所需的时间,并将结果存储起来。在进行巡检时,可以根据巡检计划的安排,计算出每个巡检段之间的巡检顺序,并使用动态规划算法计算出巡检整个路线所需的最短时间。
在考虑个别站点仪器故障或者仪器较多导致巡检耗时长的情况,可以在计算巡检时间时加入这些因素的权重,初始化一个巡检base时间值,对每个巡检段进行加权处理,从而得到更加准确的巡检耗时。同时,也可以考虑在巡检计划中加入备选站点或者备选路线,以避免因为个别站点仪器故障或者仪器较多导致巡检时间过长。
2.2.3 "天气情况
在编程过程中首先确定要查询的天气信息,构造请求参数。根据要巡检站点所在城市名称或ID号等信息使用Python中的requests库或其他类似的库发送HTTP请求,并获取响应数据,将响应数据解析为Python对象,以便于后续处理。根据接口文档中提供的JSON格式,使用Python中的json库或其他类似的库进行解析。最后对解析后的数据进行处理和展示。将天气信息存储在变量中。
使用动态规划算法优化:在考虑个别站点雨天无法巡检的情况下,可以使用动态规划算法优化巡检路线[4]。在计算巡检耗时时,可以将这些无法巡检的站点排除在外,然后使用动态规划算法计算出最优的巡检路线和巡检时间。
2.2.4 "住宿情况
要在高德在线地图中使用Python算法查找满足特定条件的酒店,一般使用高德地图的酒店API,首先设置高德地图API的key,定义住宿费用区间和其他条件。构造一个请求参数,这个参数包括key、城市名称或ID、住宿费用区间和其他条件、API版本号等信息。然后使用requests库发送GET请求,并获取响应数据。最后将响应数据转换为JSON格式,并提取出酒店信息列表进行后续处理和展示。
3 "核心代码实例解析
3.1 "地图获取及站点标记的代码解析
地图获取及站点标记过程中通常会涉及到使用高德地图的API以及可能的第三方库,如requests进行HTTP请求,以及可能的地图绘制库如matplotlib或folium。高德地图的API主要支持JavaScript和RESTful API,并没有直接支持Python的官方SDK。因此考虑使用前端JavaScript库(如高德地图的JavaScript SDK)与后端Python代码结合,前端通过引入高德地图的JavaScript SDK,并在页面中创建一个div元素来显示地图,使用AMap.Map构造函数初始化地图,并设置其属性和初始状态,后端提供数据支持。
程序代码如下:
<!DOCTYPE html>
<html>
<head>
<meta charset=\"utf-8\">
<title>地震监测站点最优路线设计</title>
<script type=\"text/javascript\" src=\"https://webapi.amap.com/maps?v=1.4.15amp;key=你的高德API密钥\"></script>
</head>
<body>
<div id=\"container\"></div>
<script type=\"text/javascript\">
var map = new AMap.Map('container', {
resizeEnable: true,
zoom: 10,
center: [116.397428, 39.90923] // 初始中心点坐标
});
</script>
</body>
</html>
在地图上标记地震监测站点的位置主要通过在地图上添加标记(Marker)来实现。遍历包含站点坐标的数组,并为每个站点创建一个AMap.Marker对象。这些标记会被添加到先前初始化的地图上,并且我们为它们添加了一个点击事件监听器,以便在用户点击标记时显示一个弹窗。
程序代码如下:
// 假设你有一个包含站点坐标的数组
var stations = [
{id: 1, position: [116.405467, 39.907761]},
{id: 2, position: [116.410275, 39.920255]},
// ... 其他站点坐标
];
// 在地图上添加标记
stations.forEach(function(station) {
new AMap.Marker({
position: station.position,
map: map,
title: '站点 ' + station.id
}).on('click', function(e) {
alert('你点击了站点 ' + station.id);
});
});
3.2 "Dijkstra路径规划算法的代码解析
算法描述伪代码如下:
function Dijkstra(Graph, source):
// 初始化距离数组,将所有顶点的距离设为无穷大,源点设为0
distance[source] ← 0
for each vertex v in Graph:
if v ≠ source:
distance[v] ← INFINITY
add v to set Q // Q是所有未确定最短路径的顶点的集合
// 初始化已访问顶点集合
S ← ∅
// 使用优先队列Q来保存待处理的顶点,并根据距离进行排序
while Q is not empty:
u ← vertex in Q with min distance[u] // 从Q中选择距离最小的顶点u
remove u from Q
add u to S // 将u加入已确定最短路径的顶点集合
// 更新与u相邻的顶点的距离
for each neighbor v of u:
alt ← distance[u] + length(u, v)
if alt < distance[v]:
distance[v] ← alt
// 更新v的前驱节点(如果需要的话)
previous[v] ← u
return distance[], previous[] // 返回距离数组和前驱节点数组
在这个伪代码中,Graph 是输入的带权有向图,用G 代替。source 是源点,用S代替。distance[] 是一个数组,用于存储从源点到图中每个顶点的最短距离,用dist代替。Q 是一个优先队列,用于存储待处理的顶点,并按照它们到源点的当前最短距离进行排序。S 是已确定最短路径的顶点集合。
以下用实例来说明:
(1) 输入G,源结点1,结点集合V=<1, 2, 3, 4, 5, 6>,从源结点开始,此时集合S中只有结点1,从1出发的结点有6、2,所以更新此时的dist[2]和dist[6]的数值(图3)。
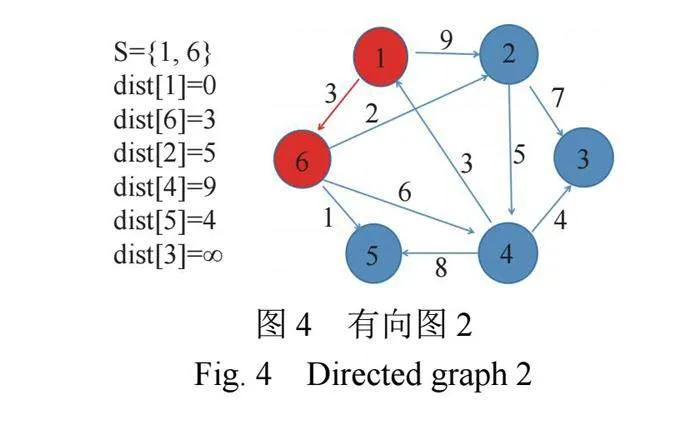
(2)选择dist[2]和dist[6]中最小的值,即dist[6]=3,将结点6加入到集合S中,然后从更新结点6出发的结点2、5、4的路径值,分别更新为dist[2]=5、dist[5]=4、dist[4]=9 (图4)。
图 4 有向图2
Fig. 4 "Directed graph 2
(3)依次类推,将最后一个结点3加入集合S中,此时已经更新完毕,找到了从结点1到达所有节点的最短路径。
在使用Dijkstra算法计算从起点到终点的最短路径时,应注意该算法要求所有边的权重均为非负值,即对于所有的边(u,v)∈E,ω(u,v)≥0,算法在运行过程中维持的关键信息是一组结点集合S。从源结点s到该集合中每个结点之间的最短路径已经被找到。算法重复地从结点集合V-S中选择最短路径估计最小的结点u,将u加入到集合S中,然后对所有从u发出的边进行松弛操作。另外,在计算最短路径时,算法将优先考虑在可用时间段内巡检的站点。然后可以通过比较不同路径的长度和可用时间段内的站点数量来规划最优路径[3]。最后根据需要可以选择总耗时最短的路径,或者选择在可用时间段内巡检最多站点的路径。
4 "结束语
该智能化软件引入交通、天气、住宿、巡检耗时几个因素,通过算法综合考虑各个因素,使用Python编程算法给出2~3种方案,计算交通耗时,再根据天气和提前输入的站点巡检耗时计算出各个方案下的巡检耗时。将各自的两个时间相加,最后能得出一个最优巡检路线。该软件完成后,能够在各中心站巡检过程中对线路和时间的规划提供很大的帮助,中心站的运维人员可以高效率、低成本地完成巡检任务[5]。另外,该软件还可以用于地磁矢量流动测量、大地重力流动测量、预警站背景噪声测量等线路优化等。
参考文献
[1] 王鑫,张建中,查斯,等. 省级地震台网运维管理模式[J]. 地震地磁观测与研究,2018,39(3):175-180 " "Wang X,Zhang J Z,Cha S,et al. Running and maintenance management mode of provincial seismic network[J]. Seismological and Geomagnetic Observation and Research,2018,39(3):175-180
[2] 安凯杰,郭宝仁,薛锦明. 地震台站手机平台电源监控系统[J]. 科技资讯,2020,18(1):21,23 " "An K J,Guo B R,Xue J M. Station power monitoring system of mobile phone platform[J]. Science amp; Technology Information,2020,18(1):21,23
[3] 罗宜武. 高速公路网巡检的最优路线规划建模[J]. 中文科技期刊数据库(引文版)工程技术,2022(6):274-278 " "Luo Y W. Optimal route planning modeling for expressway network inspection[J]. Engineering Technology,2022(6):274-278
[4] 张杰,郑云耀,刘生春,等. 基于解耦内点法与混合整数规划法的区域电网动态无功优化算法[J]. 中国电力,2023,56(1):112-118 nbsp; "Zhang J,Zheng Y Y,Liu S C,et al. A dynamic reactive power optimization algorithm for regional power grid based on decoupling interior point method and mixed integer programming method[J]. Electric Power,2023,56(1):112-118
[5] 张伟峰,潘洁,孙亮亮,等. 地震仪器运维中处置网络故障一案例分析[J]. 地震科学进展,2023,53(6):285-288 " "Zhang W F,Pan J,Sun L L,et al. A case analysis of network faults in the operation and maintenance of seismic instruments[J]. Progress in Earthquake Sciences,2023,53(6):285-288
Design and development of optimal route planning software for the inspection of earthquake monitoring stations
Zhang Weifeng, Pan Jie*, Fan Dong, Sun Liangliang, Zhao Guibao, Li Jingsheng
Bengbu Earthquake Monitoring Center Station of Anhui Province, Anhui Bengbu 233000, China
[Abstract] " " With the increasing importance of earthquake monitoring work, the planning of inspection routes plays a key role in improving the efficiency of inspection work and ensuring the accurate and continuous observation data. This article introduces the importance of inspection of earthquake monitoring stations and the limitations of existing inspection methods, and discusses the design and development of optimal route planning software for inspection of earthquake monitoring stations. The article expounds the design concept, main functions and technical implementation of the software, describes the design of key modules in detail, points out the issues that should be paid special attention to optimize the inspection route, and looks forward to the future application prospect of the software. The successful development and application of this software will provide strong technical support for the inspection work of earthquake monitoring stations, and also provide a useful reference for inspection route planning in other fields.
[Keywords] operation and maintenance of the center station; site inspection; optimal path algorithm; Python; software design
猜你喜欢
电子技术与软件工程(2016年22期)2016-12-26 11:11:30
商情(2016年42期)2016-12-23 16:56:26
中国新技术新产品(2016年22期)2016-11-29 06:36:57
电脑知识与技术(2016年25期)2016-11-16 13:35:42
中国科技博览(2016年18期)2016-10-19 07:56:25
科技视界(2016年20期)2016-09-29 13:33:02
