基于粒子群优化和模糊逻辑的输电线路运维检修无人机自主路径规划与避障技术研究
2024-12-31 00:00:00林绘林锋
科技创新与应用 2024年35期

摘" 要:该文研究一种基于粒子群优化(PSO)与模糊逻辑控制(FLC)相结合的无人机路径规划与动态障碍物避让系统。通过设计模糊逻辑隶属函数和规则,并利用PSO优化这些参数,以提高无人机在复杂动态环境中的路径规划能力。在实验中,设置静态和动态障碍物,并将目标位置定义为特定坐标。实验结果表明,该系统能够有效地规划路径并避开障碍物,具备较高的路径规划精确度和避障性能。这为无人机在复杂环境中的自主飞行提供有价值的技术支持。
关键词:粒子群优化;模糊逻辑;无人机;路径规划;避障性能
中图分类号:TP273" " " 文献标志码:A" " " " " 文章编号:2095-2945(2024)35-0055-04
Abstract: This paper studies a path planning and dynamic obstacle avoidance system for unmanned aerial vehicles based on the combination of particle swarm optimization (PSO) and fuzzy logic control (FLC). By designing fuzzy logic membership functions and rules, and using PSO to optimize these parameters, the path planning ability of the UAV in complex dynamic environments can be improved. In the experiment, static and dynamic obstacles were set up, and the target position was defined as specific coordinates. Experimental results show that the system can effectively plan paths and avoid obstacles, and has high path planning accuracy and obstacle avoidance performance. This provides valuable technical support for the autonomous flight of UAVs in complex environments.
Keywords: particle swarm optimization; fuzzy logic; UAV; path planning; obstacle avoidance performance
随着无人机技术的迅猛发展,其在输电线路运维检修中的应用愈发广泛。无人机具备高效、灵活、成本低等优点,能够在复杂多变的环境中执行任务[1]。然而,实现无人机在输电线路运维中的自主路径规划与避障是一个具有挑战性的任务。为了保证无人机的安全性和任务的高效性,需要设计智能化的路径规划与避障算法。
1" 研究内容及目的
本文研究基于粒子群优化算法(PSO)和模糊逻辑的无人机自主路径规划与避障技术。通过模糊逻辑系统处理不确定性和模糊性信息,并结合粒子群优化算法的全局搜索能力,提出一种综合的路径规划与避障方法,旨在提高无人机在复杂环境中的适应能力和避障性能。
2" 无人机自主路径规划与避障技术
2.1" 无人机自主路径规划
无人机自主路径规划是指在已知或未知环境中,无人机依据预定目标,自主生成最优飞行路径并在飞行过程中实时调整以避开障碍物,最终安全到达目标点[2]。这一过程涉及感知环境、路径规划、决策与控制等多个环节。无人机需要具备良好的环境感知能力,通过传感器获取实时环境信息,并利用路径规划算法计算出最优路径。随后,通过控制系统执行飞行任务,同时进行实时调整,以应对动态环境中的各种突发情况。实现高效、精准的自主路径规划是提高无人机任务执行效率和安全性的重要保障。在这一过程中,路径规划算法是最为关键的部分。
2.2" 现有路径规划与避障技术的挑战与不足
当前的路径规划算法大多基于静态环境假设,无法有效应对复杂动态环境中的变化[3]。实际应用中,环境中可能存在动态移动的障碍物、突发的天气变化等,这些因素都会影响无人机自主路径的规划与避障效果。另一方面,路径规划与避障技术依托于一定的传感器硬件设备与服务器,传感器在使用的过程中,获取的环境信息往往是模糊和不确定的。例如,传感器数据可能存在噪声或信息丢失,尤其在大规模环境或高维度空间中,计算时间和资源消耗显著增加,难以满足实时性的要求。最终导致路径规划滞后甚至失败。
3" 基于粒子群和模糊逻辑的无人机自主路径优化设计
3.1" 创新思路设计
通过粒子群优化算法来优化模糊逻辑控制器的参数,使得无人机可以更好地识别和避开动态障碍物。通过优化模糊隶属函数的形状和位置,以及模糊规则的权重实现目标优化。优化的目标是最小化路径中的总误差或损失函数,损失函数定义为路径偏离目标路径的距离和与障碍物的距离。
本研究实现了一个基于粒子群优化(PSO)与模糊逻辑控制(FLC)相结合的无人机路径规划与动态障碍物避让系统。通过定义PSO参数(粒子数量为30,迭代次数为50,惯性权重为0.7,自我认知学习因子和社会学习因子均为1.5),初始化粒子群位置和速度,并确保粒子参数满足递增顺序,从而优化模糊逻辑系统的隶属函数参数。模糊逻辑系统包括输入变量“目标距离”和“障碍物距离”,以及输出变量“转向角度”。在PSO主循环中,通过评估粒子的适应度,更新个体最优位置和全局最优位置,并根据优化后的参数进行路径规划模拟,最终绘制路径图和转向角度图。障碍物的位置分为2种:一种为静态障碍物,设定在路径的第10步、第20步和第30步,距离分别为5个单位、10个单位和15个单位;一种为动态障碍物,随着步骤数增加,障碍物逐渐靠近无人机。
3.2" 算法运行原理
3.2.1" 隶属度范围设置
设置的模糊系统主要包含2个输入变量和1个输出变量。输入变量分别是“目标距离”和“障碍物距离”:目标距离的取值范围为0到100,定义了3个隶属函数为近、中、远;障碍物距离的取值范围为0到50,定义了3个隶属函数为非常近、近、远。输出变量是“转向角度”,其取值范围为-90到90,该部分定义了5个隶属函数为急左转、稍左转、直行、稍右转和急右转。
3.2.2" 算法流程设置
系统根据无人机飞行的实际需求定义了一组模糊规则。通过组合输入变量的隶属度,推理得到输出变量的隶属度。这些规则模拟了无人机在不同环境下的转向决策。例如,当目标距离近且障碍物距离非常近时,无人机需要急左转以避开障碍物;当目标距离中且障碍物距离远时,无人机可以直行或稍右转以继续朝目标方向前进。
设置无人机的路径规划与避障过程总共分为50个步骤。在50个步骤内,通过粒子群优化来评估模糊逻辑系统,精确每一步的转向角度,并根据转向角度更新无人机的位置。初始位置设定为(0,0),目标距离和障碍物距离则随着步骤的增加而逐步变化。目标距离从100逐渐减小,而障碍物距离则从50逐步减小到0。在每一步,无人机根据当前的目标距离和障碍物距离,通过模糊逻辑系统计算得到转向角度,更新位置并记录路径和转向角度。
4" 实验应用效果
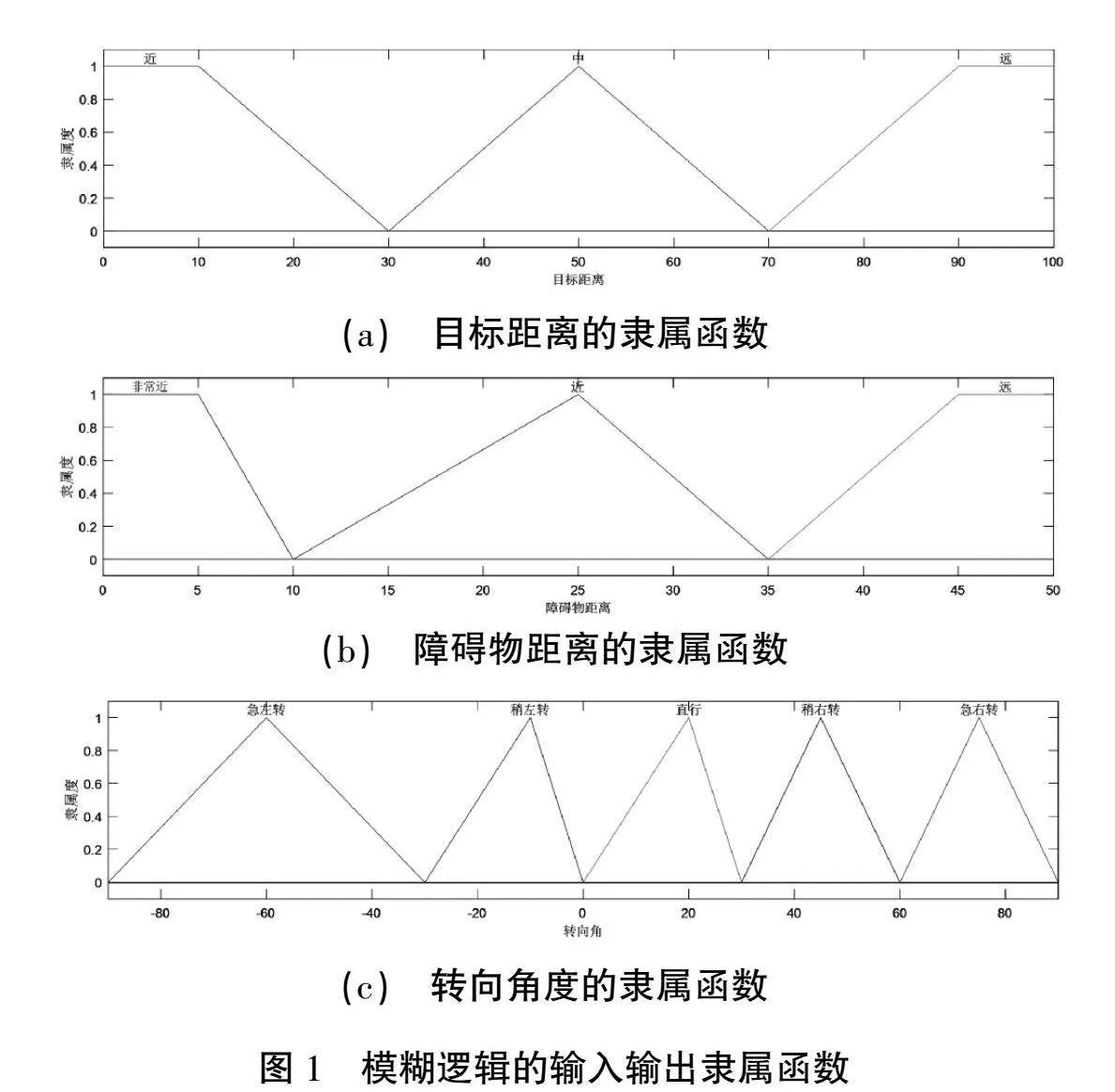
图1展示了模糊逻辑系统中3个输入输出变量的隶属函数,从上往下依次是:
目标距离的隶属函数。
近:目标距离在0到30之间被认为是近。
中:目标距离在30到70之间被认为是中。
远:目标距离在70到100之间被认为是远。
障碍物距离的隶属函数。
非常近:障碍物距离在0到10之间被认为是非常近。
近:障碍物距离在10到35之间被认为是近。
远:障碍物距离在35到50之间被认为是远。
转向角度的隶属函数。
急左转:转向角度在-90到-30之间被认为是急左转。
稍左转:转向角度在-30到0之间被认为是稍左转。
直行:转向角度在0到30之间被认为是直行。
稍右转:转向角度在30到60之间被认为是稍右转。
急右转:转向角度在60到90之间被认为是急右转。
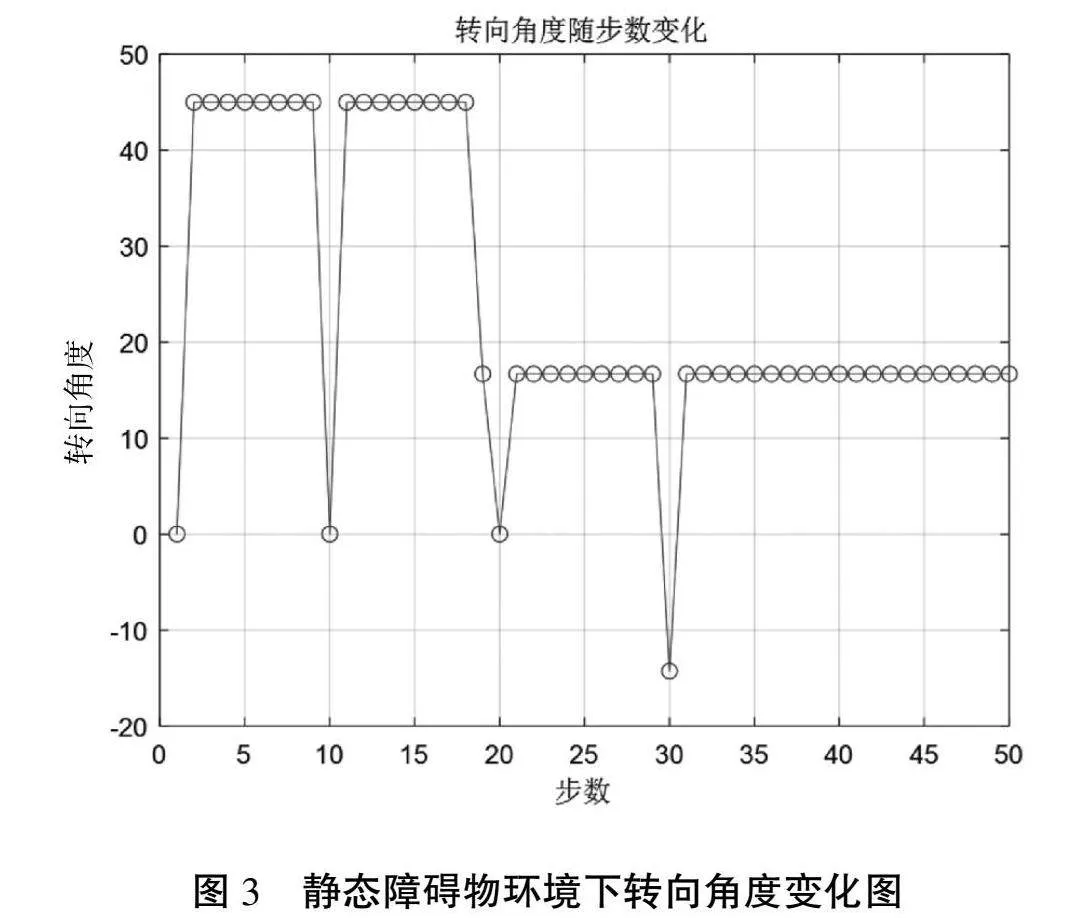
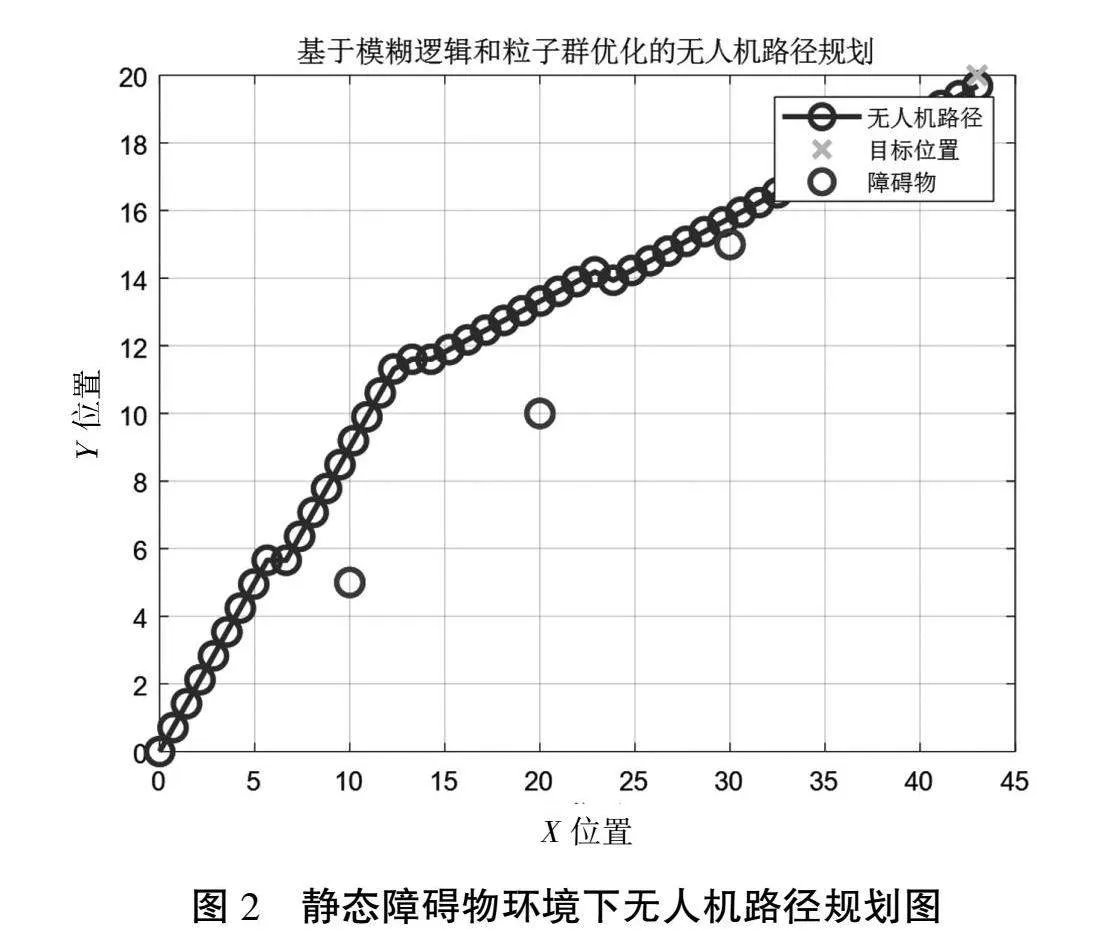
4.1" 静态障碍物下的路径变化
在静态障碍物的环境下,路径规划图如图2所示,无人机转角变化示意图如图3所示。其中圆圈线表示无人机的飞行路径,圆圈表示障碍物的位置,交叉标记表示目标位置,此处定义位置坐标为(43,20)。图3显示了无人机在每个步数上的转向角度变化情况。
无人机从起点(0,0)出发,在遇到障碍物时调整其路径,最终到达目标位置(43.018 7,19.683 9)。从图2中可以看到,无人机在接近目标位置的过程中,成功避开了多个障碍物,路径较为平滑。
转向角度随步数的变化图显示了无人机在飞行过程中所做的转向决策。从图中可以观察到,在遇到障碍物时,无人机会进行明显的转向以避开障碍物,而在没有障碍物的情况下,转向角度较小,飞行路径相对直线。
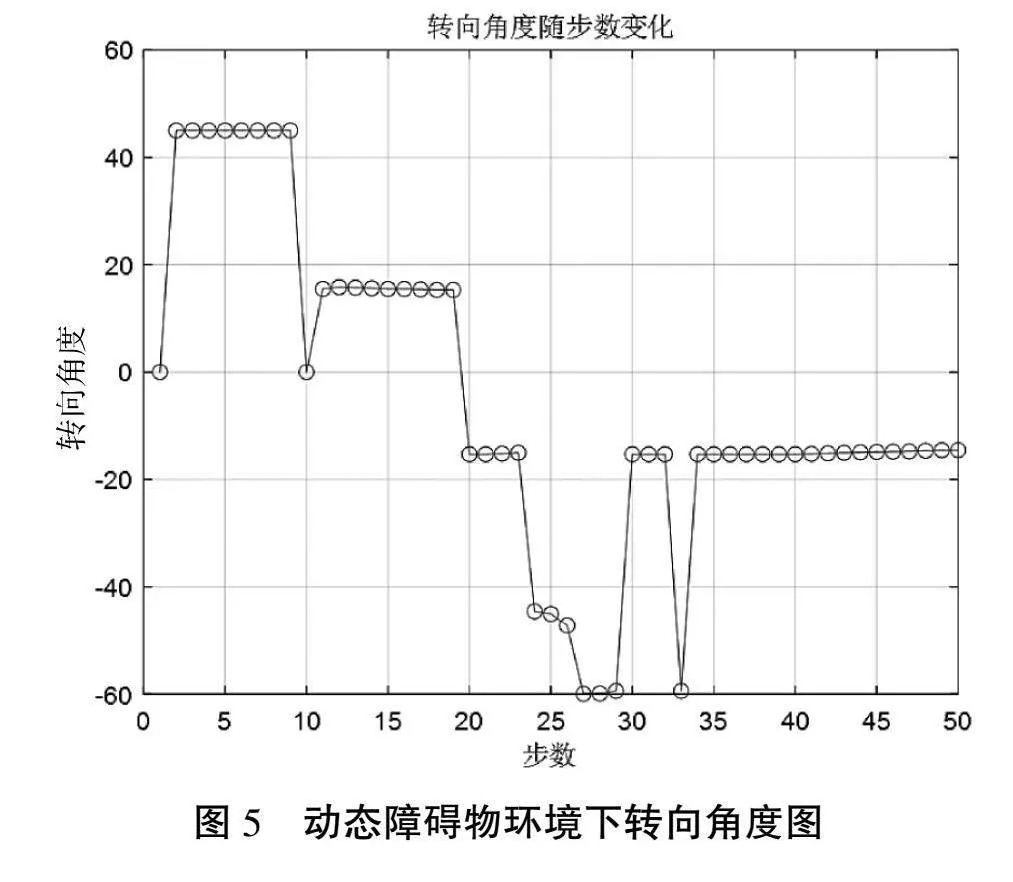
4.2" 动态障碍物下的路径变化
在本文设计中,为了加强对障碍物的检测与避让,设置障碍物的位置是动态变化的,并且随着步骤数增加,障碍物逐渐靠近无人机。
障碍物初始距离为50个单位,即在第一步时,障碍物距离无人机有50个单位的距离。随着每一步的进行,障碍物距离减少1.5个单位。例如,在第2步时,障碍物距离变为48.5个单位;在第3步时,障碍物距离变为47个单位;如此类推,直到障碍物距离为0为止。
该系统通过模糊逻辑隶属函数和规则的设计,以及利用PSO对这些参数的优化,提高了无人机在复杂动态环境中的路径规划能力。在实验中设置了动态障碍物,并将目标位置定义为(42,-3)。无人机从起点(0,0)出发,通过模糊逻辑控制调整其飞行路径,避开动态障碍物,最终到达目标位置。
实验结果如图2和图4所示,图4中圆圈线表示无人机的飞行路径,虚线表示障碍物的移动路径,交叉标记表示目标位置。图5则展现了在该过程中无人机具体的角度变化效果(图5并无具体的效果验证,只是辅助图2、图4)。
无人机从起点(0,0)出发,动态调整其路径以避开障碍物,最终接近目标位置(42.1,-3.15)。从图4中可以看到,无人机在飞行过程中成功避开了动态障碍物,路径相对平滑。转向角度随步数的变化图显示了无人机在飞行过程中所做的转向决策。由图可以观察到,在遇到动态障碍物时,无人机会进行明显的转向以避开障碍物,而在没有障碍物干扰的情况下,转向角度较小,飞行路径相对直线。
从图2与图4的路径规划图中可以看到,无人机在动态障碍物环境中成功避开了障碍物,表明模糊逻辑和粒子群优化在避障方面的有效性。
5" 结论
本研究提出了一种基于粒子群优化算法和模糊逻辑控制相结合的无人机路径规划与动态障碍物避让系统。通过设计和优化模糊隶属函数及规则,系统能够在复杂动态环境中实现高效的路径规划和避障。实验结果表明,所提方法在静态和动态障碍物环境中均表现出较高的路径规划精确度和避障性能,能够有效提高无人机的自主飞行能力。然而,在实际应用中,环境因素更加复杂多变,未来的研究可以进一步优化算法,提高系统的实时性和鲁棒性,以应对更多元化的应用场景。
参考文献:
[1] 朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3):115-120.
[2] 杨晨,张少卿,孟光磊.多无人机协同任务规划研究[J].指挥与控制学报,2018,4(3):234-248.
[3] 杨丽春,顾颖彦,白宇.基于改进人工势场法的无人机在线航路规划算法[J].电子技术应用,2018,44(4):5-9.
猜你喜欢
计算机应用(2016年12期)2017-01-13 20:14:42
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
科技视界(2016年20期)2016-09-29 12:00:43
科技视界(2016年20期)2016-09-29 11:58:53
现代电子技术(2015年16期)2015-11-17 21:14:12