分数阶PI鲁棒预测控制解析整定法
2024-12-31 00:00:00何海科
科技创新与应用 2024年35期

摘" 要:基于分数阶预测控制中微分算子难以求解的特点,提出一种分数阶PI控制器参数求解方法,并将其应用于预测控制。该文联立分数阶PI控制器与预测控制形成的传递函数建立解析方程。该方法将被控系统所需的性能指标与分数阶PI控制器相乘得到期望传递函数,利用该期望传递函数求解预测控制传递函数所需要的各项参数。增强了预测控制鲁棒性的提升,降低了调整参数的计算时间。
关键词:分数阶;预测控制;鲁棒性;解析法;图解法
中图分类号:TP13" " " 文献标志码:A" " " " " "文章编号:2095-2945(2024)35-0035-05
Abstract: Based on the difficulty in solving the differential operator in fractional order predictive control, a parameter solving method for fractional order PI controller is proposed and applied to predictive control. In this paper, analytical equations are established by combining fractional order PI controller and predictive control with transfer functions. This method multiplies the required performance index of the controlled system with a fractional-order PI controller to obtain the expected transfer function, and uses the expected transfer function to solve the parameters required for the predictive control transfer function, thus enhancing the robustness of predictive control and reduces the calculation time for adjusting parameters.
Keywords: fractional order; predictive control; robustness; analytical method; graphic method
分数阶系统(FOPTD)被广泛用于各种工业当中[1]。在过去的几十年里,人们对FOPID控制器的参数整定进行了大量的研究。Zhao等在文献[2]中提出了一类分数阶对象的FOPID整定算法。文献[3]给出了分数阶控制器的图解法,避免了用非线性方程组求解,为分数阶控制器的设计提供新的思路。Yumuk等[4]提出基于Bode理想传递函数加时滞的分数阶PID控制器的解析法。由于高阶系统可以通过化简模型用低阶系统表示,因此Valério和Costa[5]提出了基于Ziegler-Nichols的经验规则。Senol等[6]提出了一阶加时滞系统分数阶PI控制器回路成形的频标法。
模型预测控制(MPC),是一种基于模型的控制策略,广泛应用于许多先进的过程控制系统[7]。模型的复杂性大大增加了其计算负担,这是阻碍实际应用的关键因素。然而,许多工业过程可以通过一阶加死区模型充分描述[8]。对于一个典型的MPC,传统调整参数包括预测时域和控制时域以及加权矩阵中使用的成本函数。这些参数可以显著影响闭环性能、稳定性和鲁棒性特征[9]。Bagheri等[10-15]将MPC转化为极点配置问题,根据得到的解析方程调整MPC中的各项参数以解决闭环稳定性等问题。
本文提出了一类分数阶PI鲁棒预测控制解析整定法,将分数阶PI控制器与预测控制所形成的传递函数联立求解各项参数。该方法增强了系统的鲁棒性,减少了计算成本,仿真验证了本文所提出方法的有效性。
1" 分数阶PI控制器参数求取方法
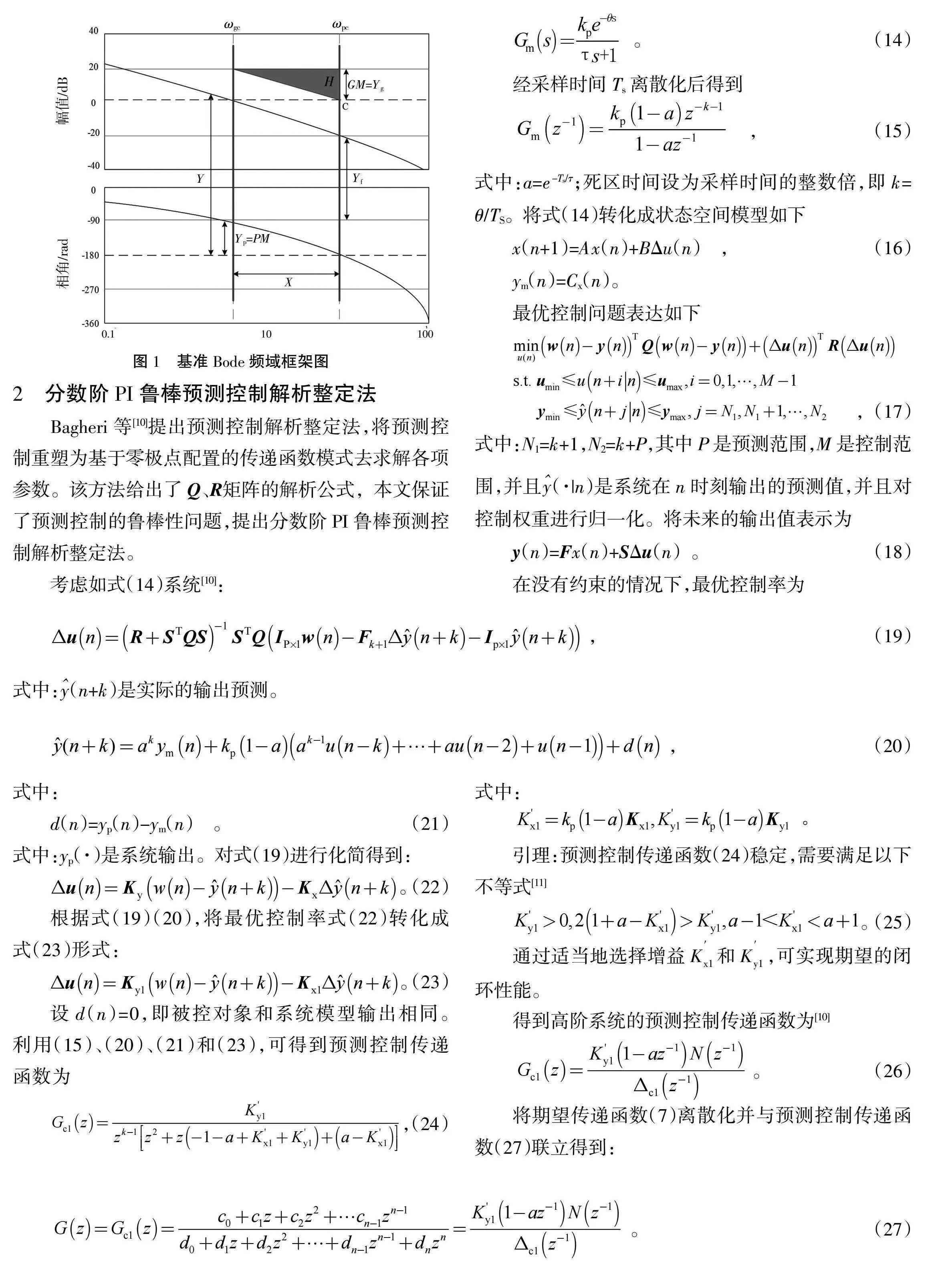
Senol等[6]提出分数阶控制器回路频标法,如图1所示,该方法将相位交叉频率和增益交叉频率之间的曲线包围在Bode图中。控制系统的性能可以通过扩展或收缩该框架的边缘和平坦化框架内的曲线来提高,因此可以避免导致系统任何不稳定的情况。
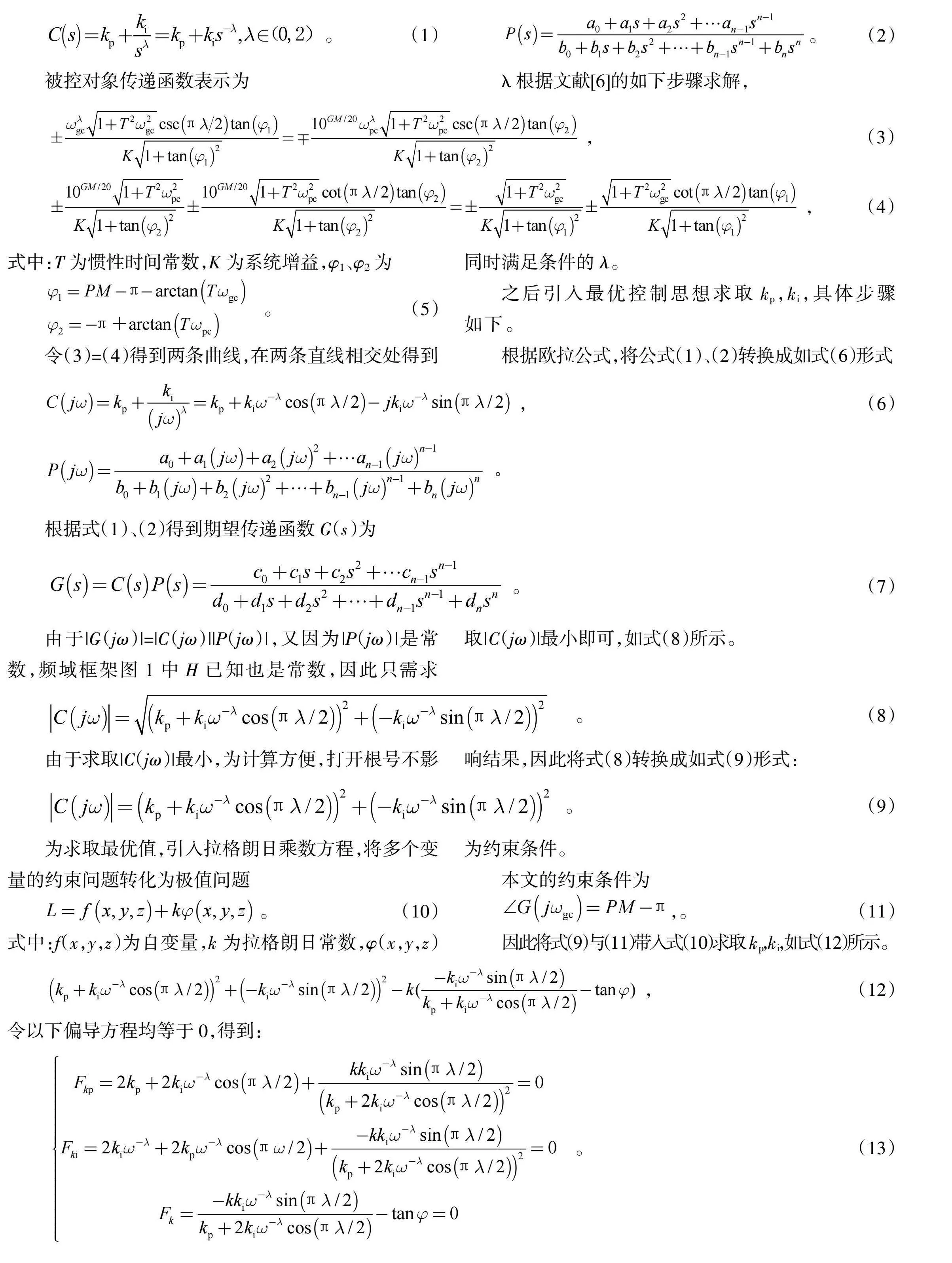
分数阶PI控制器表示为
被控对象传递函数表示为
根据文献[6]的如下步骤求解,
式中:T为惯性时间常数,K为系统增益,?渍1、?渍2为
令(3)=(4)得到两条曲线,在两条直线相交处得到同时满足条件的?姿。
之后引入最优控制思想求取kp,ki,具体步骤
如下。
根据欧拉公式,将公式(1)、(2)转换成如式(6)形式
由于|G(j?棕)|=|C(j?棕)||P(j?棕)|,又因为|P(j?棕)|是常数,频域框架图1中H已知也是常数,因此只需求取|C(j?棕)|最小即可,如式(8)所示。
由于求取|C(j?棕)|最小,为计算方便,打开根号不影响结果,因此将式(8)转换成如式(9)形式:
为求取最优值,引入拉格朗日乘数方程,将多个变量的约束问题转化为极值问题
" " " " " 。 (10)
式中:f(x,y,z)为自变量,k为拉格朗日常数,?渍(x,y,z)为约束条件。
本文的约束条件为
,。 (11)
因此将式(9)与(11)带入式(10)求取kp,ki,如式(12)所示。
令以下偏导方程均等于0,得到:
2" 分数阶PI鲁棒预测控制解析整定法
Bagheri等[10]提出预测控制解析整定法,将预测控制重塑为基于零极点配置的传递函数模式去求解各项参数。该方法给出了Q、R矩阵的解析公式,本文保证了预测控制的鲁棒性问题,提出分数阶PI鲁棒预测控制解析整定法。
考虑如式(14)系统[10]:
经采样时间Ts离散化后得到
式中:a=e-Ts/?子;死区时间设为采样时间的整数倍,即k=?兹/TS。将式(14)转化成状态空间模型如下
x(n+1)=Ax(n)+B?驻u(n)" , (16)
ym(n)=Cx(n)。
最优控制问题表达如下
, (17)
式中:N1=k+1,N2=k+P,其中P是预测范围,M是控制范围,并且(·|n)是系统在n时刻输出的预测值,并且对控制权重进行归一化。将未来的输出值表示为
y(n)=Fx(n)+S?驻u(n) 。 (18)
在没有约束的情况下,最优控制率为
式中:(n+k)是实际的输出预测。
式中:
d(n)=yp(n)-ym(n)" 。" " " " " " (21)
式中:yp(·)是系统输出。对式(19)进行化简得到:
。(22)
根据式(19)(20),将最优控制率式(22)转化成式(23)形式:
。(23)
设d(n)=0,即被控对象和系统模型输出相同。利用(15)、(20)、(21)和(23),可得到预测控制传递函数为
式中:
引理:预测控制传递函数(24)稳定,需要满足以下不等式[11]
通过适当地选择增益K和K,可实现期望的闭环性能。
得到高阶系统的预测控制传递函数为[10]
将期望传递函数(7)离散化并与预测控制传递函数(27)联立得到:
对比分子分母各项系数即可得到预测控制传递函数各项参数。之后经文献[10]方法求取Q,R矩阵各项参数。
3" 仿真实验与结果分析
考虑文献[12]如下系统:
将式(1)、(28)带入式(7)得到期望传递函数:
令期望传递函数各项指标为:相位交叉频率选择为?棕gc=10 rad/s,?棕pc=150 rad/s,相位裕度选择为PM=50°,将以上指标带入式(3)、(4)、(11)、(13)求解得到分数阶PI控制器为
将式(30),带入(29)得到期望传递函数为
经文献[13]分数阶微分算子近似法与文献[14]最优降阶法得到:
令控制时域为r=1,预测时域P=2,根据jurry稳定判据,系统稳定,选择K=0.1,K=0.06,根据文献[10]解得:
qp=2.5,r=0.03。
系统一阶时域闭环阶跃响应如图2所示。
如图2所示,系统响应曲线表明,本文所设计的预测控制方法可以有效保证系统的性能与抗干扰性。
图3中所示的控制信号已经适于系统输出设定值。
系统鲁棒稳定可行域如图4所示。
如图4所示,该图描绘了被控系统各个参数的稳定域取值范围。由图可知,当0lt;?琢lt;1鲁棒性随?琢的增加而增强。
4" 结束语
本文提出了分数阶PI鲁棒预测控制解析整定法,推导出预测控制传递函数解析表达式与分数阶鲁棒PI控制器解析表达式。本文方法将被控系统所需的性能指标与分数阶PI控制器相乘得到期望传递函数,利用该期望传递函数求解预测控制传递函数所需要的各项参数。并且由于期望传递函数所满足被控系统所需的各种性能指标,因此省略了预测控制所需要验证的鲁棒性问题,降低了调整参数的计算成本,并仿真验证了该方法的可行性与有效性。
参考文献:
[1] SANTOSH S, CHIDAMBARAM M. A simple method of tuning parallel cascade controllers for unstable FOPTD systems[J].ISA Transactions, 2016,65:475-486.
[2] ZHAO C, XUE D, CHEN Y Q. A fractional order PID tuning algorithm for a class of fractional order plants[C]//Mechatronics amp; Automation, IEEE International Conference.IEEE, 2005.
[3] MUNOZ J, MONJE C A, NAGUA L F, et al. A graphical tuning method for fractional order controllers based on iso-slope phase curves[J]. ISA transactions, 2020,105:296-307.
[4] YUMUK E, G?譈ZELKAYA, M?譈JDE, et al.Analytical fractional PID controller design based on Bode's ideal transfer function plus time delay[J].ISA Transactions, 2019.
[5] VAL?魪RIO D,COSTAJ S d.Tuning of fractional PID controllers with Ziegler-Nichols-type rules - ScienceDirect[J].Signal Processing, 2006,86(10):2771-2784.
[6] SENOL B, DEMIROLU U. Frequency frame approach on loop shaping of first order plus time delay systems using fractional order PI controller [J]. ISA transactions,2019,86:192-200.
[7] CAMACHO E F, BORDONS C, CAMACHO E F, et al. Constrained model predictive control[M].Springer London, 2007.
[8] LIU G, Li P. GENERALIZED PREDICTIVE CONTROL FOR A CLASS OF BILINEAR SYSTEMS[J].Computer Simulation, 2007,24(3):173-175.
[9] SANGMOON L, SANGCHIL W. Model Predictive Control for Linear Parameter Varying Systems Using a New Parameter Dependent Terminal Weighting Matrix(Systems and Control)[J].IEICE transactions on fundamentals of electronics, communications and computer sciences, 2006.
[10] BAGHERI P B A, SEDIGH A K. Analytical approach to tuning of model predictive control for first-order plus dead time models[J].Iet Control Theory amp; Applications, 2013,7(14):1806-1817.
[11] RICHARD C, JOHNSON J.Computer-controlled systems: Theory and design: Karl J. ?魡str?觟m and Bj?觟rn Wittenmark[J].Automatica,1985.
[12] WANG C Y, JIN Y S, CHEN Y Q. Auto-tuning of FOPI and FO[PI] controllers with iso-damping property[J].IEEE, 2009.
[13] DENIZ F N, ALAGOZ B B, TAN N, et al. Revisiting four approximation methods for fractional order transfer function implementations: Stability preservation, time and frequency response matching analyses[J].Annual Reviews in Control, 2020,49.
[14] 薛定宇.控制系统计算机辅助设计:MATLAB语言及应用[M].北京:清华大学出版社,1996.
[15] SHENOY K V, SAHANI M, CHURCHLAND M M. Cortical Control of Arm Movements: A Dynamical Systems Perspective[J].Annual Review of Neuroscience, 2012,36(1):37-359.
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18 00:43:01
农业机械学报(2020年2期)2020-03-09 07:35:30
中国教育信息化(2019年22期)2019-12-20 07:31:26
中华建设(2019年7期)2019-08-27 00:50:18
系统管理学报(2018年2期)2018-08-13 01:04:40
考试周刊(2016年65期)2016-09-22 18:25:40
工程建设与设计(2016年2期)2016-08-22 09:12:48
发明与创新(2016年5期)2016-08-21 13:42:52
项目管理技术(2016年12期)2016-06-15 20:29:33
锻压装备与制造技术(2016年3期)2016-06-05 09:36:12