
机器人技术在城市地铁检修中的应用
2024-12-31 00:00:00张锦苟光辉
信息系统工程 2024年11期
关键词:应用研究



摘要:近年来,随着城市地铁网络的扩展和运行负荷的增加,地铁设备的安全和效率成为重要关注点。机器人技术作为一种新兴的解决方案,在地铁检修中展示了显著的应用潜力。探讨了机器人在地铁检修中的多方面应用,包括但不限于设备故障检测、轨道和设施清洁、设备维护和修理。通过分析机器人在这些任务中的应用效果和成本效益,研究发现机器人技术能够提高检修效率、减少人为错误,从而有效提升地铁运行的安全性和可靠性。未来,随着技术的进一步发展和应用场景的拓展,机器人技术有望成为城市地铁检修的重要支柱和创新动力。
关键词:机器人技术;城市地铁检修;应用研究
一、前言
随着城市地铁系统的快速发展和扩展,确保地铁车辆安全运行和设备的可靠性成为至关重要的任务。传统的检修方法存在人力资源紧张、效率低下等问题,因此引入机器人技术成为改进的重要途径。机器人能够通过高精度的传感器和智能算法,实现对地铁车辆的全面检测和精确定位,从而提高了检修的效率和准确性。本文旨在探讨机器人技术在城市地铁检修中的应用,分析其优势和挑战,为地铁运营管理者提供新的技术思路和应用方向。
二、机器人技术在城市地铁检修中的应用
(一)巡检
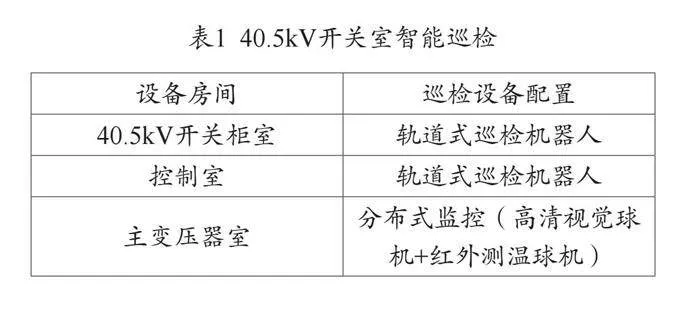
1.40.5kV开关室智能巡检
轨道式巡检机器人在40.5kV开关室的应用,体现了智能化巡检在高压电力系统中的重要性和实用性。通过对开关柜进行视觉识别、局部放电监测、红外热成像温度监测和噪音监测,机器人能够全面评估设备的运行状态,及时发现潜在的故障和安全隐患,从而提高设备的检测效果和运行安全性[1]。见表1,检查开关柜内部的设备和接线是否存在异常,如损坏、松动或污秽等;监测开关柜内部绝缘系统的局部放电现象,这是绝缘老化和故障的早期迹象;通过红外热像仪检测开关柜各部分的温度分布,识别过热区域,从而判断设备是否存在过载或接触不良等问题;评估开关柜运行时的噪音水平,异常噪音可能是设备故障的征兆。
2.控制室智能巡检
见表2,主变电所控制室是电力系统的核心部分,其中包含了大量的二次设备,这些设备对于电力系统的稳定运行至关重要。因此,对控制室的实时监控和定期巡检是确保电力系统正常运行的关键措施。轨道式巡检机器人在控制室的应用,可以大大提高巡检的效率和准确性。根据表2中列举的监测项目,检查液晶显示屏上的参数是否正常,包括电压、电流、频率、功率等关键指标。
3.主变压器室智能巡检
见表3,主变压器是电力系统中至关重要的设备,其安全运行对于整个电力系统的稳定至关重要。主变压器的故障可以分为发展型和突发型两大类。发展型故障通常是由于绝缘性能逐渐下降导致的,而突发型故障则是由于瞬间的过电压、过热或其他意外事件引起的。可以24小时实时监控变压器上的重要表计,如温度计、油位计等,确保这些参数始终处于正常范围内。
(二)维护与清洁
机器人可执行地铁车辆的自动化清洁任务,而具体的清洁整理事项涵盖除漆、除锈、车底吹扫等工作。利用涂装机器人技术、激光加工机器人技术在恶劣的工作环境中作业,从而达到人与工作场合的隔离[2]。在车辆底部清扫时,可使用机械臂辅助清扫枪进行操作,并可安装机器人清洁工具对构架、轮对除锈除漆,以达到良好的检修效果,使地铁车辆维持在正常的运行范围中。
(三)安全检查
1.大修
地铁车辆大修指的是对车辆各部件进行系统全面的检查,分解车辆各部件结构进行整修。大修需要测量整形车体、转向架等,全面检测车辆各系统性能,通过调试、检验的方式确保车辆性能的可靠性,不断检修直至车辆性能完全恢复。大修还包括全面更换车辆部分系统、重新刷机标记等[3]。
2.架修
地铁车辆检修工作中的架修阶段主要是指对地铁列车的底架和车辆架构进行检修和维护的工作阶段。这个过程包括对车辆底盘、架构、悬挂系统以及与轨道接触的关键部件进行详尽的检查和维修。检查车辆底盘的结构完整性和连接部件的紧固情况,确保底盘系统在运行中不出现安全隐患。对轮对进行磨损和破损检查,必要时进行更换或修复,以保证列车在轨道上平稳运行。
3.定修
地铁车辆定修主要是检查和检测车辆的各系统运行状态,对系统部件进行清洁、检查、润滑。卸下部分部件检查并检测其状态,如空调、受电弓、蓄电池等,检查完成后,需要对其进行必要的试验操作。
(四)预测维护
1.对车辆进行故障检测
在地铁车辆的检修作业中,故障检修是一个至关重要的环节。常见的地铁车辆故障可以分为视觉类故障和触觉类故障两大类。视觉类故障包括列车内外的信号灯和显示屏出现故障,影响乘客的信息获取和安全通知传达。摄像头和监控系统故障,影响车厢内外的监控和安全检查[4]。故障检修作为地铁车辆检修的核心环节,需要有系统的检测方法和专业的技术团队,以确保故障能够及时发现和解决,维持地铁运营的稳定性和可靠性。
2.对车辆进行故障修理
在完成车辆故障检修之后,需要对现有的故障进行修理。目前,国内外车辆检修主要采用的模式是换件修理与现车修理相结合的模式。现车修理将机器人技术应用于现车修理模式中,由于修理环境复杂、修理作业的难度大且故障种类多样,使得机器人技术在电车修理模式中难以完成检修操作,而通过运用针对性的机器人技术,则可实现工作繁琐但位置固定的操作,比如螺栓紧固机器人技术、材料加工机器人技术,二者相互配合可以进行螺栓紧固、对材料表面进行打磨。在换件修理模式中,装配机器人技术和移动机器人技术则可进行车辆故障零部件的替换件调用、拆卸和安装操作。
三、智能巡检机器人架构
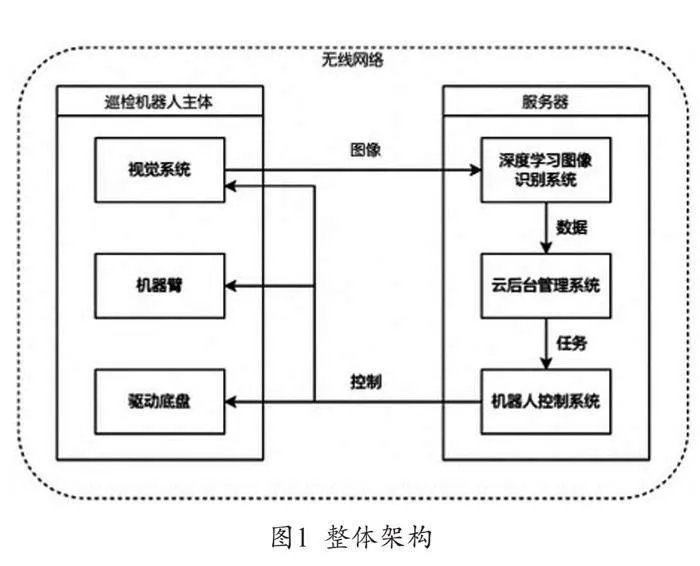
(一)整体架构
如图1所示,该智能巡检机器人系统分为主体机器人和服务器控制端。机器人主体包括驱动底盘、协作机器臂和视觉检测系统,能够自主执行检修任务并采集图像数据。服务器控制端负责任务调度、图像识别和数据管理,通过无线网络连接实现与机器人的实时通信和数据传输。
(二)驱动底盘
驱动底盘是智能巡检机器人不可或缺的组成部分,其设计和功能旨在支持机器人在复杂环境中高效执行各类检修任务。如图2所示,其主要组件包括SLAM激光雷达用于实时定位与地图构建,确保精准导航和避障能力;无线网络设备实现与服务器的实时数据交换和远程控制;LED指示灯带提供运行状态的可视化显示,便于远程监控和识别机器人当前工作状态;自动充电站保证长时间工作的稳定性和持久续航能力。通过先进的技术配置和多功能设计,驱动底盘为提升检修效率、保障工作安全性提供了重要保障。
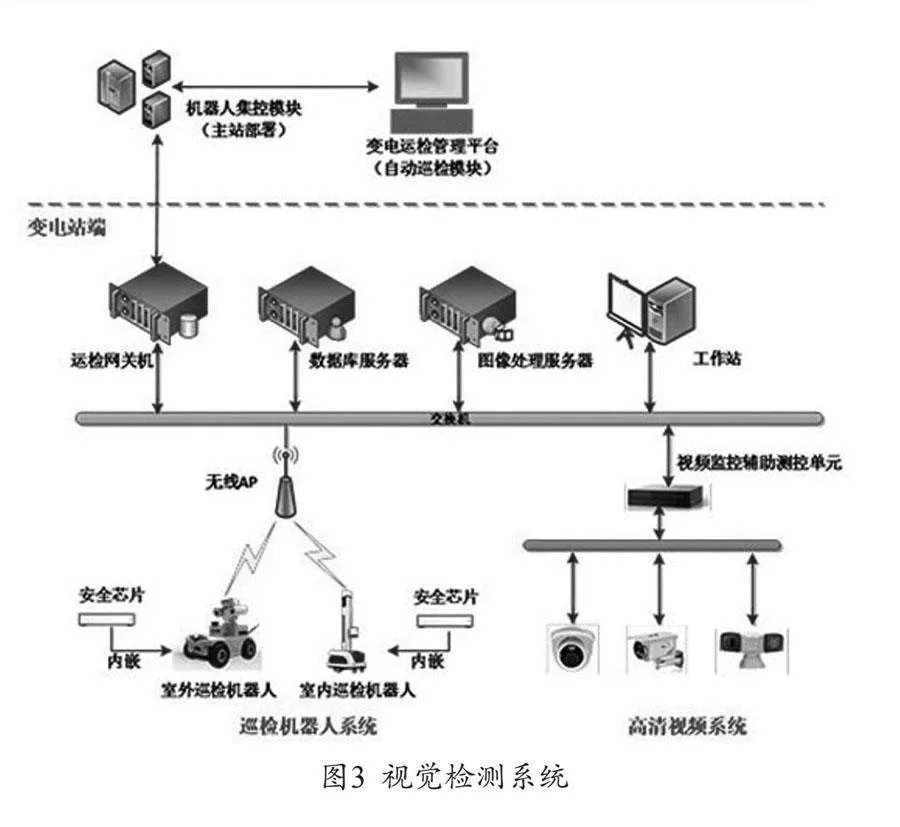
(三)视觉检测系统
如图3所示,视觉检测系统是一个复杂的系统,主要由线阵相机和2D/3D相机组成,各自具有不同的功能和优势。线阵相机利用双激光光源的交叉补光技术,有效避免单一光源造成的阴影问题,特别适合对地铁车辆底部进行成像,提高成像质量和准确性。系统能够同时进行2D和3D图像采集任务,大幅缩短了检测时间,提升了检测效率和准确性。
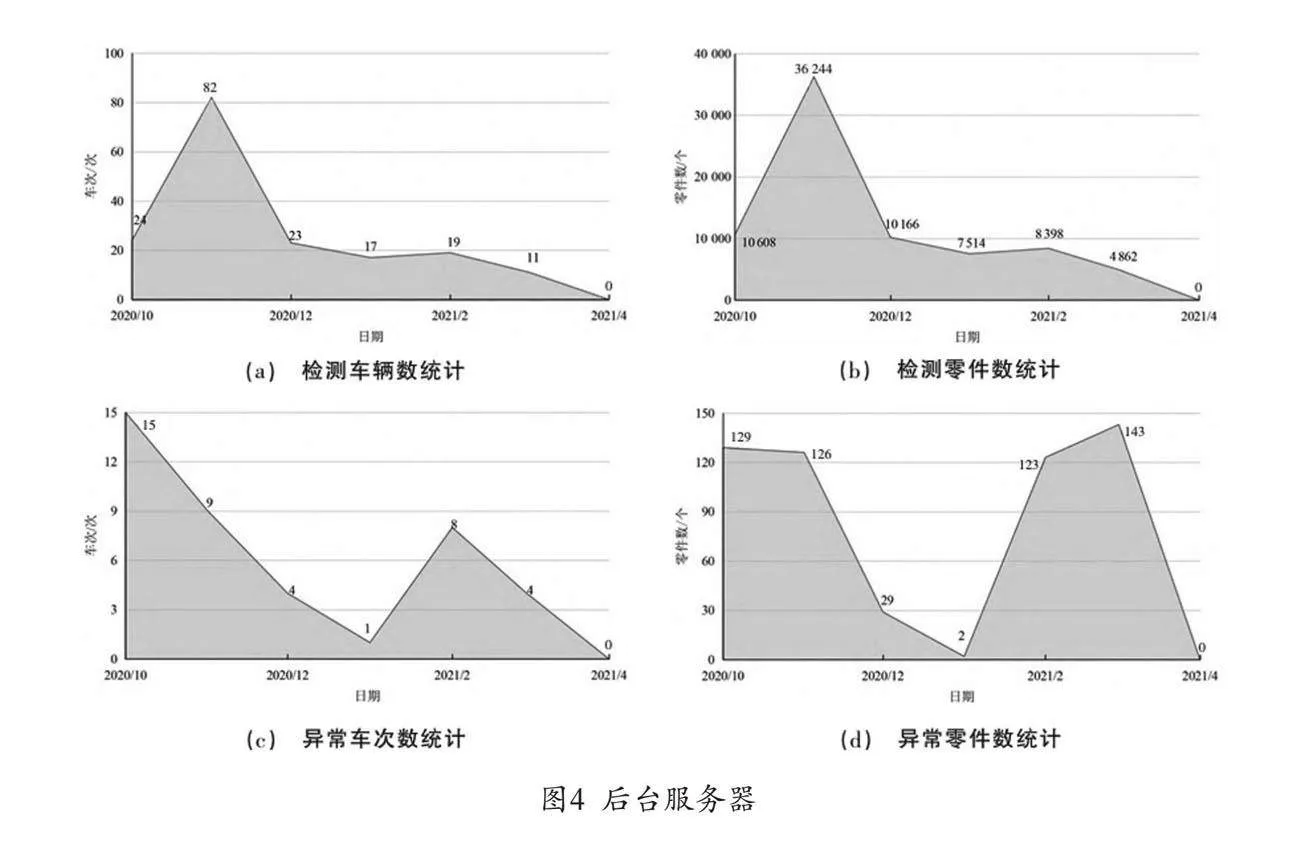
(四)后台服务器
如图4所示,后台服务器通过先进的图像处理算法,对从地铁车辆和轨道系统采集到的图像进行实时处理和分析。这些图像可能涵盖列车外部、内部以及轨道设施等多个方面。基于分析结果,后台服务器能够识别可能存在的故障特征或异常情况。为后续的数据分析和长期故障趋势分析提供支持。这些数据对于优化地铁维护策略和提升系统可靠性至关重要。
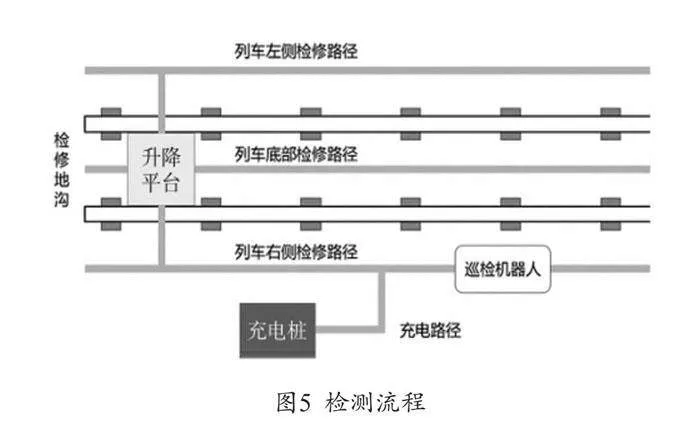
四、检测流程
如图5所示,智能巡检机器人在地铁车辆检修中的应用流程描述了机器人从接收任务到完成检测的一系列步骤。这个过程是自动化的,旨在提高检修效率和准确性。机器人首先使用传感器和扫描设备确定地铁车辆在检修股道的准确停靠位置,并识别列车的编号。这一步骤确保了机器人在正确的位置进行检测,并且能够区分不同的列车,使用高清摄像头和其他传感器对关键设备的螺栓、螺母、线缆、刹车片和油位等进行图像采集。这些图像数据是检测的关键,它们将被用于后续的分析和判断。
五、测试研究
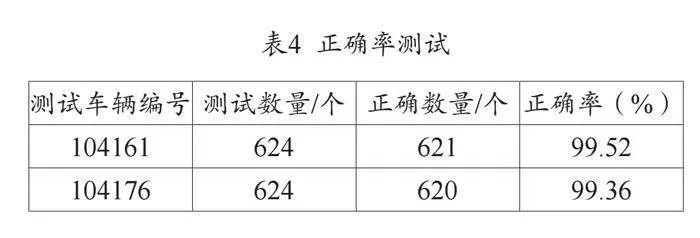
(一)正确率测试
见表4,在本次评估中,选取了两辆列车(104161车和104176车)作为检测对象,共有1248颗外观正常的螺栓接受了智能巡检机器人的检查。简而言之,就是机器人在对列车的螺栓进行健康检查时,共扫描了2496颗螺栓,其中1248颗是健康的。
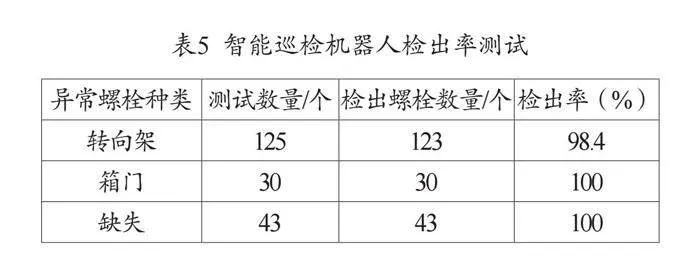
(二)智能巡检机器人检出率测试
见表5,在智能巡检机器人的检出率测试中,对于所有被识别为异常的螺栓,如果机器人能够正确地检出它们的异常状态,那么这些检出的异常螺栓就视为成功检出。成功检出数量与总异常螺栓数量的比例即为智能巡检机器人的检出率。深度学习图像识别算法是智能巡检机器人检测系统的重要组成部分,它的准确性受图像质量和图像复杂程度的影响[5]。
六、结语
在城市地铁检修中,机器人技术的应用不仅仅是技术革新的体现,更是提升运营效率和乘客安全的重要手段。通过本文的研究和分析,我们看到机器人在设备维护、故障诊断和清洁任务中展现出显著的潜力和优势。机器人的引入不仅减少了人力投入和维护成本,还提升了作业的精准度和可靠性。期待智能巡检机器人在城市地铁运营中发挥更大的作用,为乘客提供更安全、更高效的出行体验。
参考文献
[1]李林锋.地铁车辆车底巡检机器人的功能及其应用分析[J].城市轨道交通研究,2022(S1):82-85+89.
[2]裴小辉,孙嘉俊,康征征,等.基于OpenCV的地铁故障检测机器人[J].科学技术创新,2022(25):181-184.
[3]赵立新.城市轨道交通地铁车辆智能运维研究[J].运输经理世界,2022(15):71-73.
[4]孟鸿飞.地铁车辆基地智能列检机器人设计接口研究与应用 [J].信息记录材料,2022,23(04):236-239.
[5]巫红波,邱伟明,王静,等.城轨车辆用多股道智能巡检机器人检测系统[J].机车电传动,2022(01):45-52.
基金项目:1.山西省科技厅“复杂非结构化环境移动机器人关键技术研究”(项目编号:SXKJ2022093341);2.浙江交通职业技术学院人才专项“基于多目立体视觉的复杂环境下机械臂跟踪关键技术研究”(项目编号:822321KY0125)
作者单位:张锦,浙江交通职业技术学院轨道交通学院;苟光辉,浙江交投交通建设管理有限公司
责任编辑:张津平、尚丹
猜你喜欢
知音励志·社科版(2016年8期)2016-11-05 03:39:57
文艺生活·中旬刊(2016年10期)2016-11-04 06:11:12
科技视界(2016年18期)2016-11-03 23:23:07
科技视界(2016年18期)2016-11-03 22:35:48
中国科技博览(2016年22期)2016-11-01 18:39:42
中国科技博览(2016年22期)2016-11-01 18:20:31
时代金融(2016年23期)2016-10-31 13:58:17
中国科技博览(2016年19期)2016-10-19 14:10:37
电脑知识与技术(2016年21期)2016-10-18 22:57:58
科学与财富(2016年28期)2016-10-14 18:20:19
