
基于足底压力信息的数据采集系统设计
2024-12-28 00:00:00余珂欣李宏凯
机械制造与自动化 2024年6期









摘要:步态识别对于航天医疗康复和助老防摔领域研究具有积极作用,准确、规范的足底压力信息是完成步态识别的基础。通过设计足底压力信息获取系统,完成足底压力数据的采集、处理等工作并实际应用。从相关器件选型、传感器布局分析、硬件和软件模块等多方面进行考量,通过实验验证此系统的可行性和可靠性。
关键词:步态信息;数据采集;压力传感器;信号处理;无线传输;嵌入式系统
中图分类号:TP274文献标志码:B文章编号:1671-5276(2024)06-0138-04
Abstract:Gait recognition plays a positive role in aerospace medical rehabilitation and anti-fall aid for the elderly, and its accomplishment is based on accurate and standardized plantar pressure information. This paper designs a plantar pressure information acquisition system to complete the collection and processing of plantar pressure data and execute the practical application. Its feasibility and reliability are verified by experiments in terms of related device selection, sensor layout analysis, hardware and software modules.
Keywords:gait information; data acquisition; pressure sensors; signal processing; wireless transmission; embedded system
0引言
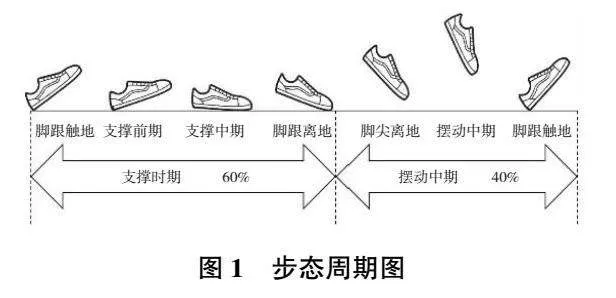
步态特征是指人习惯性走路或跑步的方式[1]。个体行走方式的不同,会导致足底所受压力大小和变化的差异。行走过程中一个周期内的步态变化如图1所示[2]。
走路过程中,至少有一只腿在支撑身体,另一只腿处于摆动期,以此保持身体的平衡。在一个步态周期[3]内,脚跟触地是单腿支撑的开端,也标志着摆动末期的结束;脚尖离地是摆动初期的开始标志,也是单腿支撑的结束标志;脚前掌和脚趾逐渐受力的过程是处于单腿支撑的阶段[4]。
1信息获取系统
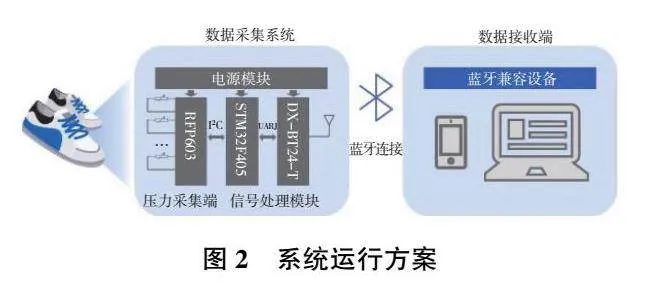
本节通过设计构建一套基于足底压力信息的数据采集系统,完成足底压力数据的采集和处理工作。系统硬件设计模块综合考虑了功耗、成本、体积等问题,确定采用STM32F405RGT6为主控器[5],用C语言编写嵌入式[6]软件程序,可实现数据收集和保存功能。系统运行方案如图2所示。
1.1器件选型
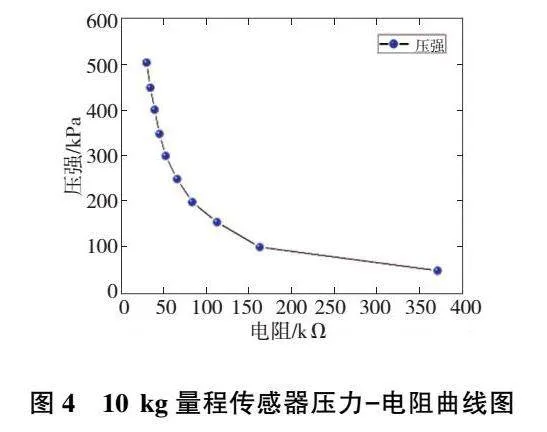
由于压阻式压力传感器结构简单,成本低,因此本文拟采用RFP603DW06GD型压阻式压力传感器。一名志愿者模拟多种日常行为,当足底受到最大压强时,10kg量程传感器显示电阻为60Ω,传感器分压0.004V,系统ADC获取精度为0.001V。以上依据式(1)计算得出。
式中:V为薄膜传感器的分压值;V0为ADC电路总电压,该系统为3.3V;R1为传感器电阻值,取60Ω;R0为限流电阻,为47kΩ。
考虑到足底动态压力可能超过使用者身体质量,为了让压力鞋垫模块适用于更多人群,本文采用量程更大的压力传感器。图3所示为传感器实物规格图,图4所示为10kg量程的RFP603DW06GD柔性薄膜压力传感器的压强-电阻值曲线图。
1.2传感器布局分析
Tekscan公司的F-Scan系统[7]可以实时监测人体足底压力情况并将压力分布情况以图像的形式呈现在上位机上。从系统观察可知,人的足底压力主要集中在脚后跟、脚前掌和脚趾3个部位[8];同时前期将足底涂满墨水踩在干净的亚克力板上,依据脚印形状和墨水多少判断压力分布情况,实验结果如图5所示。综合以上分析,在图6(a)中的A—J位置布置10个压力薄膜传感器,对应的鞋垫实物如图6(b)所示。
1.3系统硬件设计
1)压力鞋垫模块
压力传感器输出的是变化的电阻信息,因此需要设计电路将电阻信息转换成电压信息,并将模拟信号采样转换成数字信号[9],然后储存数据。这里采用分压方式设计传感器部分电路。系统共计10路压力传感器接口,根据实际情况选择分压电阻为47kΩ,无压力时,传感器阻值大于10MΩ,等效于断路。
信号处理模块以STM32F405RGT6为主控器[10-11],芯片提供3个ADC,最多可测量15个通道的外部信号源,最多可达到12位分辨率,提供了6个串口通信模块(其中4个USART和2个UART)和1个SDIO接口。其主要职责是完成信号调节、滤波处理、电平变换、角度解算、数据存储和传输等任务[12]。整个信号处理模块主要由压力信号调节部件、主控部件和电源部件等组成。硬件主板实物如图7所示,其尺寸为30mm×30mm。
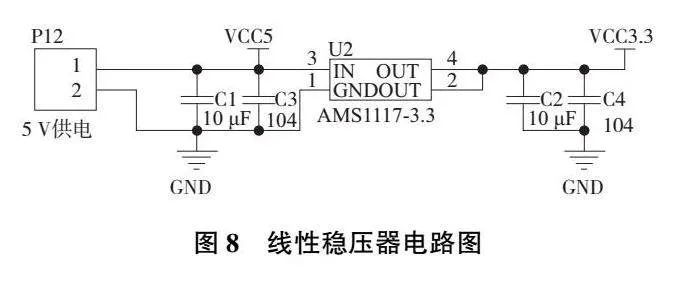
该系统采用电池供电,选择电源芯片AMS1117-3.3将5V转化为3.3V。此芯片体积小且稳定,是一种低漏失电压调整器,其稳压调整管由一个PNP驱动的NPN管组成的,有固定和可调两个版本可用。这里选择适用5.0V~3.3V的固定稳压器。电路原理示意图如图8所示。
图8中C1、C3是电源输入滤波;VCC 3.3是3.3V电源,供模拟电路使用。
2)无线通信模块
本文无线传输部分使用DX-BT24-T蓝牙模块,采用英国某公司14531芯片,配置256KB空间,遵循V5.1BLE蓝牙规范。该模块采用UART接口,具备低成本、小体积、低功耗以及收发灵敏度高等优点,只需要搭配少量外围元件就能实现蓝牙串口透传的强大功能。
3)通信距离测试
为了检验步态数据信息获取系统中蓝牙通信的可用距离,本文将PCB板放置在鞋底进行了户外蓝牙设备连接测试。由于空间相对封闭,蓝牙信号强度可能受到一定影响。将系统电源打开,用开发的手机蓝牙软件连接模块蓝牙,实验者移动系统直至蓝牙断开。经多次测试可知:当系统与手机端的距离在5m内时可以快速连接且不容易中断连接,因此在后续实际使用实验过程中,尽量保持系统与手机端距离在5m内。
1.4系统软件设计
系统软件设计主要包括主控芯片的片上开发部分和上位机的软件开发部分。片上开发部分使用C语言实现数据采集、数据处理、数据传输等多项功能,需要在主控芯片STM32F405RGT6中完成以下任务:1)实现多路足底压力数据的ADC转换;2)设置传感器相关参数,配置系统工作模式和数据采样频率;3)配置串口发送、接收的波特率和数据输出格式等;4)实现数据存储。
1)数据采集程序实现
本文中数据采集装置的软件程序开发平台是STM32CubeMX和Keil uvision 5.0。该装置的数据采集功能由C语言编写的嵌入式软件程序控制实现,包含采集数据和导出数据两大功能,上位机界面如图9所示。
系统时钟为168Hz;ADC由定时器驱动,以500 次/s的频率进行精确采样;串口发送速率为10Hz;串口波特率为9 600bit/s。传感器在配置成功后开始进入测量模式,并在测量完成后存储数据。
2)手机端软件程序实现
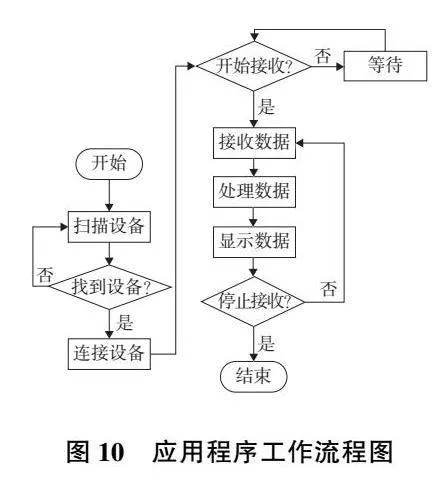
本文通过MIT app inventor平台线上制作软件开发手机端软件,操作流程和使用方法简单便捷。通过基于浏览器的编辑工具创建手机APP。之后经过连接线可将APP部署至手机上运行。本文所开发应用程序主要实现了BLE设备控制、传感器数据显示等功能,应用程序工作流程如图10所示。
2足底压力数据样本
2.1特征数据采集
本系统将硬件集成部分嵌入足弓处,电池设置在脚腕处固定后进行数据采集。设定压力传感器采样时间间隔为T=0.075s。实验结果显示:该系统能够恰当地捕捉到人的步态特征,由此验证这套系统可正确获取人步行过程中的步态数据。为取得不同个体在多种状态下的足底压力数据,本文对10名志愿者进行数据样本采集实验,数据采集过程要求每位志愿者依次完成站立和行走两种人体正常活动动作和人体异常摔倒动作。
摔倒行为在如图11所示的海绵垫(厚度20cm)上进行,志愿者模拟下肢失去控制或因身体不适而摔倒。
2.2实验数据分析
通过实验采集到的足底压力数据是一串时间间隔为150ms的离散数据,为方便对不同状态下的压力数据进行分析,对采集到的离散数据进行处理,绘制出直观的变化曲线。图12为一段连续动作足底压力变化图。站立状态的足底压力持续稳定,变化幅度最小;步行状态的足底压力数据周期性明显,支撑相时足底各部分压力增大后减小,摆动相时压力较为稳定,摔倒后数据为0。图13为某一时刻的手机软件界面压力云图。在运动过程中志愿者可实时查看到足底压力数据和云图变化情况(本刊为黑白印刷,如有疑问请咨询作者)。
3结语
本文首先分析了人体在日常活动中的步态变化,后自行设计可穿戴设备收集人体活动步态数据。对包括传感器系统和信号处理模块在内的整个足底压力测量系统进行了硬件框架介绍;进而对信号处理模块的软件设计进行了介绍;最后利用这套数据采集系统进行实验,分析不同状态下足底压力数据变化趋势,以验证此系统能够正确有效地采集步态数据并获取人的步态特征。
参考文献:
[1] OUNPUU S. The biomechanics of walking and running[J]. Clinics in Sports Medicine,1994,13(4):843-863.
[2] 刘泽原. 基于智能鞋垫的步态分析及其应用研究[D]. 哈尔滨:哈尔滨工业大学,2019.
[3] 鲍根喜,王旭,夏新雷,等. 正常足步态周期中动态足横弓形态的初步分析[J]. 中国矫形外科杂志,2001,9(4):2-5.
[4] MEHDIZADEH S,DOLATABADI E,NG K D,et al. Vision-based assessment of gait features associated with falls in people with dementia[J]. The Journals of Gerontology:Series A,2020,75(6):1148-1153.
[5] 赵嘉豪,叶梁杰,罗心韵,等. 基于STM32的光电搬运机器人设计与试验[J]. 机械制造与自动化,2021,50(6):158-161,165.
[6] 林滔. 一种基于嵌入式小型PLC的智能控制模块设计[J]. 机械制造与自动化,2022,51(5):219-222,234.
[7] ZAMMIT G V,MENZ H B,MUNTEANU S E. Reliability of the TekScan MatScan(R) system for the measurement of plantar forces and pressures during barefoot level walking in healthy adults[J]. Journal of Foot and Ankle Research,2010,3:11.
[8] 王明鑫. 正常中国成年人足底压力分析[D]. 上海:同济大学,2007.
[9] 刘万兵,刘海军,曹勇,等. 基于STM32的信号采集卡设计[J]. 电子设计工程,2022,30(18):100-103,109.
[10] 张旭,亓学广,李世光,等. 基于STM32电力数据采集系统的设计[J]. 电子测量技术,2010,33(11):90-93.
[11] 喻金钱,喻斌. STM32F系列ARM Cortex-M3核微控制器开发与应用[M]. 北京:清华大学出版社,2011.
[12] WANG L,HU W M,TAN T N. Recent developments in human motion analysis[J]. Pattern Recognition,2003,36(3):585-601.
收稿日期:20230324
第一作者简介:余珂欣(1996—),女,陕西咸阳人,硕士研究生,研究方向为航天仿生科学与技术,2865378873@qq.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.027
猜你喜欢
东方教育(2016年9期)2017-01-17 00:06:54
计算机时代(2016年12期)2017-01-14 21:05:51
企业技术开发·下旬刊(2016年11期)2016-12-27 16:47:20
科技创新与应用(2016年34期)2016-12-23 19:08:02
电脑知识与技术(2016年24期)2016-11-14 01:03:29
企业技术开发·中旬刊(2016年10期)2016-11-12 14:59:41
计算机教育(2016年7期)2016-11-10 08:31:34
计算机教育(2016年7期)2016-11-10 08:12:11
中国科技博览(2016年18期)2016-10-19 11:13:09
中国新通信(2016年16期)2016-10-18 11:00:54
