
基于力矩负反馈的柔性关节机器人自适应分层滑模控制方法
2024-12-28 00:00:00朱敏李文安
机械制造与自动化 2024年6期



摘要:因柔性关节机器人自身动态特性较强,难以捕捉线性变化特性,控制输出力矩稳定性较差。提出一种基于力矩负反馈的柔性关节机器人自适应分层滑模控制方法。分析机械臂与关节动作之间线性变化关系和惯性规律变化,引入自适应方法,建立慢变子滑膜控制规律函数。创新性地结合力矩负反馈,求解机器人关节状态与平衡点隶属度关系求解控制规则,合理控制关节力矩,完成柔性关节机器人自适应分层滑模控制。实验数据证明:所提方法应用后,控制轨迹与期望轨迹之间差距最小,控制精准度高,适用于多种柔性关节,控制输出力矩稳定。
关键词:力矩负反馈;柔性关节机器人;自适应分层滑模控制;隶属度关系;模态求解函数
中图分类号:TP242文献标志码:A文章编号:1671-5276(2024)06-0257-05
Abstract:In order to overcome the difficulty in capturing linear changes and improve the poor stability of control output torque caused by the strong dynamic characteristics of flexible joint robots, a self-adaptive layered sliding mode control method based on negative torque feedback for flexible joint robots is proposed. The linear relationship and inertia law changes between the robotic arm and joint movements are analyzed, and with the introduction of adaptive methods, a slow variable synovial control law function is established. Negative torque feedback is innovatively combined to solve the relationship between robot joint state and balance point membership, joint torque is reasonably controlled, and adaptive layered sliding mode control is completed for flexible joint robots. The experimental data shows that the application of the proposed method results in the smallest difference between the control trajectory and the expected trajectory with high control accuracy, suitable for various flexible joints and stable in control output torque.
Keywords:negative torque feedback; flexible joint robot; adaptive hierarchical sliding mode control; membership relationship; modal solving function
0引言
柔性关节机器人是现阶段应用较多的一种,与其他机器人相比,其搭载内置控制器体积更小,动作更加轻快便捷,实用效果俱佳。但考虑到应用空间中存在的一些障碍物等物理条件限制或实际应用限制等问题,需要以现实运行环境条件为基础。
针对机器人连杆与设备之间易出现的关节碰撞导致控制效果差的问题,相关学者进行了大量研究。文献[1]提出一种基于非线性级联系统的机器人关节控制方法。以机器人动作时关节与连杆之间产生的关节角度数为基础,建立线性变化的动力学模型,按照模型参数设计关节振动反馈函数;根据关节角与振动值之间的线性关系,通过振动比例数值完成滑膜控制。该方法没有考虑到环境影响问题,对于关节角的精密控制力度不够,导致存在一定误差。文献[2]则以神经网络作为控制算法设计机器人力矩控制器。采用神经网络搭建学习模型,将机器人参数输入至模型中并求解伺服驱动系数。建立关节滑膜控制器,通过控制器输出完成算法。该方法实际应用局限性较强,控制器数据反馈和响应速度较差,影响实用性。
综合上述问题,本文采用一种基于力矩负反馈的柔性关节机器人自适应分层滑模控制方法,创新性地建立模态方程并求解当机械臂运动时关节所产生的模态阶数,引入自适应分层滑模控制方法提高避障、转角或其他工作的关节运动精准度,通过控制达到关节和连杆之间的高度耦合状态以提高运行效率。
1基于力矩负反馈的机器人自适应分层滑模控制方法
1.1柔性关节机器人模态求解
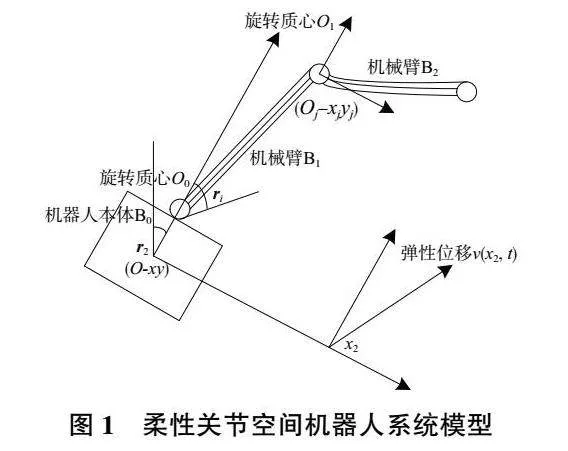
为提高柔性关节机器人滑模控制方法在实际中的应用性能,本文在具体控制工作前建立系统模型,分析关节动作的线性变化,将线性变化参数[3]作为后续控制参照条件,大大提高了控制精准度。建立柔性关节机器人系统模型如图1所示。其中,B0表示机器人本体;B1表示刚性机械臂;B2表示柔性机械臂;O0、O1表示连杆与关节之间旋转质心[4]。建立惯性坐标系(O-xy)以及关于各个机械臂分体Bj(j=0,1,2)的坐标轴(Oj-xjyj)。假设,各个关节分体在一个二维平面(O-xy)内进行运动,得到本体B0的质心Oci运行惯性关系。
图1中,点O在水平和垂直方向上的矢量运动直径为ri,r2表示柔性机械臂B2在坐标系上的矢量直径;rc表示质心动作点的矢量直径[5]。考虑到柔性关节机械臂B2一端受到限制时,另一端自由的形态关系,因此,提出一种假象模态算法,用ri(x2,t)来表示机械臂在坐标系x2上第t时刻弹性位移值[6],在该状态下机器人的模态方程为
式中:φi(x2,t)表示机器人柔性臂在第i个阶层的模态函数值;ηi表示第i个阶层模态[7]坐标;φi表示保留数;t表示运行时间。若想提高机器人模态阶级的计算精度,采用二阶动力学方程进行求解,得到:
式中η1和φ1分别表示对应的模态坐标ηi和保留数φi的二阶数。得到最终的柔性关节机器人模态求解函数为
式中:βi表示机器人关节动作最稳定点时需要满足的频率值;cos(βix″2)表示机器人关节的余弦模态值;sin(βix″2)表示关节的正弦模态值[8]。
通过上述过程即可完成柔性关节机器人系统数学模型构建,并得到柔性关节机器人动作稳定和模态之间的正向关系。
1.2引入自适应策略
1)慢变子滑膜控制规律函数
柔性关节机器人在运动时其关节会产生系统转角误差,同时还会出现柔性振动问题。这些问题都是影响自适应滑膜分层控制精准度的因素。为了提高机器人自适应分层滑模控制[9]方法在多种环境下的应用性能,建立慢变子系统控制规律,给出如下定义:
按照自适应滑膜控制原理,根据上述过程的大水平柔性关节机器人的动态特性来切换超平面,设计滑膜控制器,当系统处于滑膜控制面时,控制系统沿切换超平面向原点滑动[10],该过程称之为自适应滑膜控制过程。所提方法将其与力矩负反馈矩阵[11]相结合,通过力矩矩阵来约束并输出最佳滑动控制参数,使得控制值与期望值不断逼近,提高控制精准度和算法的环境应用能力。建立慢变子滑膜控制规律函数λ(x)为
式中:e表示切换前控制参数矩阵;λ表示慢变子因值。通常情况下,柔性关节机器人的稳定运动需要遵循慢变子和控制规律,保证二者之间的关系平衡,在该状态即可达到最大运行状态tgt;0,limt→SymboleB@e″=0,其中t表示运行时间。
2)机器人关节动力状态与滑膜参数计算
根据控制率建立关节稳定参数函数[12]:
式中:y表示机械臂滑膜量;M(q0,q)表示对称正定矩阵;q表示机器人力矩的实际输出向量;q0表示期望输出向量;Kp表示正定对角矩阵。
对式(5)中的稳定参数V进行求导,结合式(4)给出的机器人关节滑膜切换函数以及慢变子系统[13]控制定律,可得到机器人关节动力状态与滑膜参数:
利用式(4)和式(6),将上式改写为
式中:Kv表示负正定对角矩阵;u表示关节角控制质量;v表示关节角控制转速;e″T表示滑膜周期切换控制参数;sT表示控制变量。将机器人的关节参数输入至模态矩阵中,即可得到当下时刻机器人进行关节运动时最稳定点的控制参数,将该值作为后续控制函数[14]约束的参照,提高控制精准度。
1.3力矩负反馈下的控制规则求解
考虑到实际环境中可能存在力矩受限的情况,将滑膜控制规律改进为如下形式:
式中:τs表示机器人实时输出的力矩幅值;tanh(ξ)表示滑膜控制规律序列,tanh(ξ)=[tanh(ξ1),tanh(ξ2),…,tanh(ξn)]T。通过式(9)可以看出,该方法通过限制柔性关节机器人力矩幅值大小的方式来达到控制目的。
但需要特别注意的是在滑膜控制的参数切换过程中可能出现抖动现象,影响控制效果。为了消除这种不稳定的振动现象,采用自适应滑膜控制理论得到最终的控制规则如下:当机器人关节状态偏离平衡点较远时,需要选择较大的滑膜边界宽度ζ;当机器人关节状态偏离平衡点较近时,需要选择较小的滑膜边界宽度ζ。定义模糊控制语言[15]为:PL正大,PM正中,PS正小;y、y″为控制单元的状态输入值。
给出机器人的模糊控制规则为:
当y为PL且y″为PL时,ζ设定为PM;当y为PL且y″为PS时,ζ设定为PL;当y为PS且y″为PL时,ζ设定为PM;当y为PS且y″为PS时,ζ设定为PS。
通过对与关节运动相关联的其他参数进行不断调整,满足机器人所需的实际工况需求。在滑模控制器的设计中,可以将机器人模糊控制规则作为一个参考信号进行反馈控制,提高了控制系统的鲁棒性和稳定性。同时,滑膜控制规则可以帮助机器人更准确地感知环境,快速适应外部干扰和变化,提高控制方法的实用性和适应性,从而实现更为高效的柔性关节机器人控制。
2性能测试
2.1测试环境
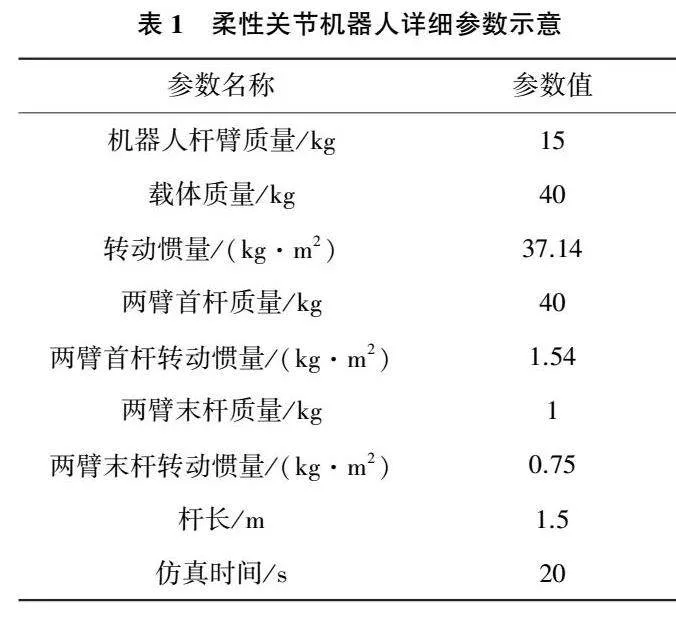
为验证文中提出的柔性关节机器人自适应分层滑模控制方法的有效性和实用性,采用改进NDO设计平台,选择一组工业机器人作为测试对象。为保证实验结果的真实性和精准性,将测试对象连接多组无线传感器(ADXL345加速度计、ADIS16227角度传感器、LOAD1300力传感器)和监测仪(Vicon运动监测仪、PT100温度监测仪、MPX53压力监测仪),启动NDO设计平台,进行实验数据采集,并通过多次试验和调整设置实验参数。基于Matlab平台编写自适应分层滑模控制算法并将其应用于NDO设计平台。为了验证控制算法的有效性,利用NDO设计平台进行真实环境的控制实验。在Simulink中建立控制系统的模型并进行建模和仿真,包括传感器和监测仪数据的处理和分析。机器人运动过程中,传感器和监测仪器开始获取运动状态和反馈数据,并将这些数据(实验数据采集中的加速度、角度、力、温度等)传输到NDO设计平台中进行处理和分析。机器人模型如图2所示,测试过程涉及到的柔性关节机器人相关参数如表1所示。
2.2机器人自适应分层滑模控制结果对比分析
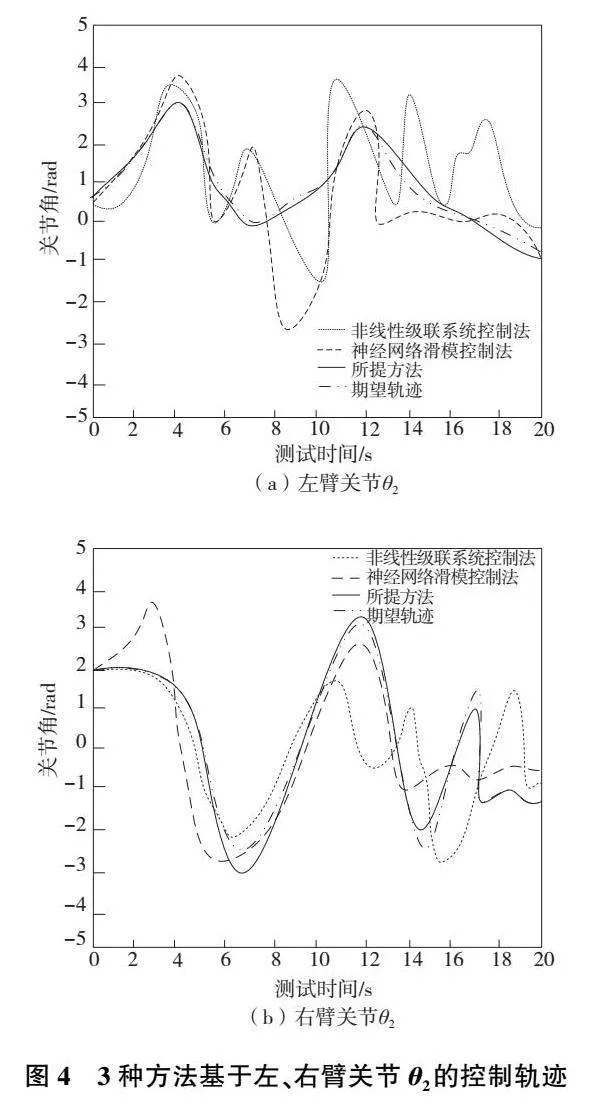
以图2给出的柔性关节机器人为控制对象,设定左臂和右臂分别进行不同的动作。根据现场传感器数据给出机器人的实际运动轨迹和期望运动轨迹数据,与基于非线性级联系统的机器人控制方法、基于神经网络滑模控制器的机器人控制方法进行对比分析,并以左关节、右关节分别进行对比测试。3种方法的控制轨迹如图3和图4所示。
从图3中可以看出,3种方法基于左、右臂关节θ1的控制结果整体变动差距不大,因为θ1在左、右臂上的位置动态特性不强,进行运动产生的关节角较小。从3种方法的细节比对可以看出,所提方法的控制轨迹与期望轨迹之间差距最小,变化最为吻合,没有出现大幅度的控制差异。反观另外2种方法,整体控制轨迹与理想值偏差较大,在多处位置均存在轨迹偏离现象且表现较为严重。
由图4中可知,基于左、右机械关节θ2的控制轨迹结果来看,3种方法中只有所提方法最贴合期望控制轨迹,控制偏差较小;而另外2种方法与期望轨迹之间的控制误差较大。说明分层滑膜控制效果较好,出现偏差较小,提高了机器人的实际应用能力。这是因为所提方法中引入了力矩的反馈信息,可以更加准确地描述机器人的动态特性,提高了控制系统的鲁棒性和控制精度。
2.3基于电机的输出力矩的控制结果分析
为验证控制算法的整体实用性能,当测试所提方法达到目标控制结果时,产生的电机输出力矩大小,实验结果如图5所示。
从图5中可以看出,在所提方法的力矩负反馈混合方法控制下,柔性关节机器人系统完成期望轨迹所需的力矩幅值明显变小,说明基于所提方法只需要较小的力矩控制量即可达到目标控制结果。这是因为所提方法采用了自适应分层滑模控制,能够自主地调节每个子系统的控制策略,根据实际环境和任务需求,灵活地进行控制优化,而并非需要手动调节或根据经验设计和优化控制器。因此,应用所提方法,机器人在多种环境下的适应能力变强,控制效率较高,具有一定的实用价值。
3结语
本文提出了一种基于力矩负反馈的柔性关节机器人自适应分层滑模控制方法。经测试后得出以下结论。
1)将所提方法应用在机械臂控制中,左、右臂关节的控制轨迹误差较小。该方法可以有效控制柔性关节机器人的运动,具有较强的鲁棒性和空间描写能力,能够保持较高的控制精度。
2)将所提方法应用在机械臂控制中,电机的输出力矩幅值较小,表明控制器能够根据关节状态及时调整电机输出的力矩,保证机器人运动的稳定性和安全性。
3)所提方法可以有效地解决机器人运动过程中的动力学耦合问题,并且能够通过传感器直接测量关节输出的力矩,无需进行额外的力学建模和校准。
综上所述,基于力矩负反馈的柔性关节机器人自适应分层滑模控制方法可大幅度提升控制精准度,避免产生误差,并且具有较强的稳定性,在多种环境下均能高效适用。
参考文献:
[1] 梁捷,秦开宇,陈力. 基于非线性级联系统的弹性关节空间机器人新型滑模控制[J]. 力学与实践,2021,43(4):544-554.
[2] 刘建华,夏志刚,周贤钢,等. 基于神经网络滑模控制器的外骨骼机器人力矩控制器设计[J]. 湘潭大学学报(自然科学版),2021,43(5):41-50.
[3] 刘宜成,熊宇航,杨海鑫. 基于RBF神经网络的多关节机器人固定时间滑模控制[J]. 控制与决策,2022,37(11):2790-2798.
[4] 王君,程浩,姜荣俊,等. 基于滑模反馈的履带式机器人自适应轨迹跟踪[J]. 组合机床与自动化加工技术,2023(1):25-28,33.
[5] 尤鑫烨,陈力. 考虑摩擦特性的柔性关节空间机器人自适应CMAC神经网络鲁棒控制[J]. 计算力学学报,2022,39(2):192-197.
[6] 张文辉,陈浩文,闻志,等. 面向未知目标的柔性关节空间机器人滑模控制[J]. 空间控制技术与应用,2021,47(3):49-56.
[7] 冯钧,孔建寿,王刚. 基于模糊补偿的多关节机器人自适应神经滑模控制[J]. 模糊系统与数学,2021,35(5):65-75.
[8] 李俊阳,赵琛,夏雨,等. 基于改进LuGre摩擦模型的机器人关节模糊自适应反步控制[J]. 湖南大学学报(自然科学版),2022,49(10):147-156.
[9] 苗双全,张宝泉,王明超,等. 基于扰动观测器的机载光电稳定平台自适应指数时变滑模控制[J]. 兵工学报,2022,43(7):1636-1645.
[10] 李广有,王娜,尹庆华. 欠驱动AUV基于干扰观测器的滑模控制[J]. 机械制造与自动化,2022,51(2):177-180.
[11] 雷军委,肖支才,白祥军. 基于柔化与抗饱和函数的高超声速飞行器自适应滑模控制研究[J]. 战术导弹技术,2021(4):117-123,131.
[12] 谢进进,廖鹤,姚闯,等. 采用MSCMG群的卫星平台敏捷机动控制地面闭环试验验证[J]. 宇航学报,2021,42(9):1119-1127.
[13] 张雷,王子浩,孙逢春,等. 四轮轮毂电机驱动智能电动汽车转向失效容错控制研究[J]. 机械工程学报,2021,57(20):141-152.
[14] 王群京,刘中阳,李国丽,等. 基于自适应干扰观测器的永磁球形电机连续非奇异终端滑模控制[J]. 电机与控制学报,2022,26(8):66-78.
[15] 赵子乾,张宁,殷国栋,等. 基于差动制动的汽车拖车组合系统动态稳定性滑模控制[J]. 东南大学学报(自然科学版),2021,51(4):687-693.
收稿日期:20230529
基金项目:云南省自然科学基金项目(202056895645)
第一作者简介:朱敏(1977—),女,云南石屏人,讲师,硕士,研究方向为柔性制造技术、硫酸真空泵等,lyq668725@163.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.051
