
明确观察状态下的高精度步进电机伺服系统自抗扰控制
2024-12-28 00:00:00袁芬丁旭东
机械制造与自动化 2024年6期





摘要:高精度步进电机机械驱动系统的非线性特性会影响系统的状态特征,导致正常运行状态不明确。为此,提出高精度步进电机伺服系统自抗扰控制方法。对电机伺服系统展开结构分析,以此为基础确定系统电压、负载转矩等相关参数。开展步进电机伺服系统动力学分析,确定系统当前状态,设计复合自抗扰控制器,包括跟踪控制器、扩张状态观测器和非线性组合控制律3个部分。将伺服系统输入信号输入设计好的控制器中,完成复合自抗扰控制。实验结果表明:使用所提方法开展伺服系统复合自抗扰控制时,控制精度、稳定性和效率均较高,控制效果较好。
关键词:高精度步进电机;机械驱动伺服系统;复合自抗扰控制;扩张状态观测器
中图分类号:TP273文献标志码:A文章编号:1671-5276(2024)06-0247-04
Abstract:The nonlinear characteristics of high precision stepping electrical appliance drive system will affect the state characteristics of the system, leading to the uncertainty of the normal operation state, for which the active disturbance rejection control method of high-precision stepping motor servo system is proposed. Structural analysis is conducted on the motor servo system, based on which the relevant parameters such as system voltage and load torque are determined. Dynamic analysis of stepper motor servo system is carried out to define the current state of the system. A compound ADRC including tracking controller, extended state observer and nonlinear combined control law is designed. The input signal of the servo system is input into the designed controller to complete the composite active disturbance rejection control. The experimental results show that when using the proposed method to carry out composite active disturbance rejection control for servo systems, the control accuracy, stability, and efficiency are high with good control effect.
Keywords:high precision stepper motor; mechanical drive servo system; composite active disturbance rejection control; extended state observer
0引言
步进电机[1-2]由于自身具备较高的控制精度且控制方法简洁,启停迅速,工作稳定性高,被广泛应用于高端控制领域中。随着工业化程度的不断深入,对于步进电机的性能要求愈加严格。此外,数控加工领域以及空间立体加工等技术的不断提升,使得步进电机在工作过程中产生大量的电磁干扰,系统输出误差增加。为有效解决上述问题,需对步进电机驱动伺服系统开展自抗扰控制。
张臻等[3]为有效提升电机永磁伺服系统的抗干扰能力,对扩张状态观测器内各项参数状态展开变量估计,设计反馈控制律。在此基础上,增加位置误差跟踪,完成自抗扰控制器的设计,并根据设计的控制器实现电机伺服系统的自抗扰控制。蔡改贫等[4]建立系统的误差状态空间方程并以此建立伺服系统的自抗扰控制模型。对模型惯性权重展开分析,使用粒子群方法对模型惯性权重实施优化。通过完成参数优化后的自抗扰控制器实现伺服系统的自抗扰控制。冯宾等[5]根据LuGre模型建立伺服系统微分方程模型并完成系统摩擦补偿与自抗扰控制结合的复合控制器。基于观测器增益稳定前提下,利用LuGre模型非线性摩擦,缩减量测噪声带来的影响。与此同时对扩张观测器实施线性抑制,采用3阶的增益线性观测器对系统总扰动实施估计,完成伺服系统的自抗扰控制。然而,上述方法在开展伺服系统自抗扰控制时,未能及时获取电机伺服系统负载转矩状态,导致伺服系统自抗扰控制的控制效果差。为此,本文提出高精度步进电机机械驱动伺服系统复合自抗扰控制方法。
1高精度步进电机伺服系统状态特征
在开展高精度步进电机机械驱动伺服系统复合自抗扰控制前,需要明确步进电机的机械驱动伺服系统结构并获取电机伺服系统[6]的相关状态特征参数,建立高精度步进电机机械驱动伺服系统动力学模型,为后续电机伺服系统复合自抗扰控制做好基础准备工作。
1.1高精度步进电机机械驱动伺服系统结构分析
高精度步进电机机械驱动伺服系统结构如图1所示。
在电机运行过程中,转矩幅值越高,电机的性能越好。由此,设定步进电机转子功率角为φL,电机转子平衡位置的功率角为φM,以此获取电机运行时的负载转矩:
式中:TM为电机的最大静止转矩;TL为电机运行负载转矩。
1.2步进电机伺服系统动状态特征
基于电机伺服系统结构,建立步进电机动力学状态特征模型。由于步进电机运行时的非线性因素较为严重,因此建立步进电机伺服系统动力学状态特征模型时,忽略电机磁路饱和效应、磁滞以及涡流影响。
电机定子绕组互相对称且电角度为90°,获取步进电机的电压方程,结果如式(2)所示。
式中:L0为绕组电感分量;UA、UB分别为电机中A相、B相的绕组电压;iA、iB分别为A相、B相的绕组电流;L2为基波分量;ke为电机运行过程中产生的反电动势;rA、rB分别为A相、B相的绕组内部电阻;wr为转子角速度;d为电机轴向系数;t为状态系数;φ为绕组功率角。
根据上述确定的电机电压方程,获取电机伺服系统的转矩方程:
式中:β为电机伺服系统的摩擦因数;J为系统转动惯量。由于步进电机伺服系统主要通过绕组产生磁动势,因此设定电机伺服系统输入磁能为W,建立伺服系统数学动力模型:
根据建立的模型,设定电机伺服系统状态变量为xp1、xp2,以此获取电机伺服系统的扩张状态空间特征方程:
式中:yp为伺服系统的输出变量;xp3为系统总扰动扩张后新状态变量;cp、op为状态变量系数。
2复合自抗扰控制器设计
基于上述获取的系统扩张状态空间方程可知:系统运行过程中会产生系统扰动,影响系统的正常运行[7],为此需要设计相适应的复合自抗扰控制器,对步进电机伺服系统实施自抗扰控制。通过控制器抑制伺服系统运行时产生的系统扰动,增加步进电机机械伺服系统的控制精度。
复合自抗扰控制器结构框图如图2所示。
扩张状态观测器需要估计受控对象状态值以及伺服扰动变量,进而使伺服系统的位置外扰作用对象简化成积分串联形式,实现伺服系统的线性化以及确定化,而非线性组合主要是决定系统控制对象的控制规律。复合自抗扰控制器各个部分的设计过程如下。
2.1跟踪控制器设计
设定系统过渡过程的实际位置为ξp1,近似微分量设定成ξp2,以此获取跟踪微分器的运行方程:
式中:ηm为跟踪微分器的位置给定信号;fst(v2-ηm,rp,h0)为最速函数;rp为跟踪加速因子。基于上述运行方程即可完成伺服系统跟踪控制器设计。
2.2扩张状态观测器设计
在扩张状态观测器[8]设计过程中,将上文中的状态变量观测值设定成zp1、zp2,总扰动观测值为zp3,以此获取伺服系统自抗扰控制器中扩张状态观测器运行方程:
式中:ep1为扩张状态观测控制器观测位置角与实际位置角误差;ep2为估计转速与实际转速误差;ep3为观测器估计扰动与实际扰动误差;λ1为观测器的滑膜切换函数[9];1、2为观测器滑膜面参数;q1为滑膜切换向量增益系数;q2为常数。
2.3非线性组合控制律设计
非线性组合控制律设计过程中,将该部分的滑膜切换函数设定成λ2,非线性组合控制律实现流程如式(8)和式(9)所示。
式中:κp2为速度跟踪误差;κp1为转子跟踪误差;q3为滑膜切换函数增益;3为滑膜面参数;u0和up分别为控制器的基本控制量以及扰动补偿后的被控制量。
基于上述自抗扰控制器中各个部分的设计结果,完成伺服系统复合自抗扰控制器的设计。将伺服系统输入信号输入设计好的控制器中,通过控制器完成高精度步进电机机械驱动伺服系统的复合自抗扰控制。
3实验与分析
为了验证本文步进电机伺服系统复合自抗扰控制方法的整体有效性,将所提方法与文献[3]方法、文献[4]方法进行对比。
3.1实验结果及分析
为了对比3种方法在电机伺服系统自抗扰过程中实际控制效果,选取某公司生产的步进电机为测试样本,结合Matlab仿真软件获取该电机机械驱动伺服系统的工作环境,利用所提方法、文献[3]方法以及文献[4]方法对其实施自抗扰控制。测试对象如图3所示。
1)电机伺服系统输入电压值检测
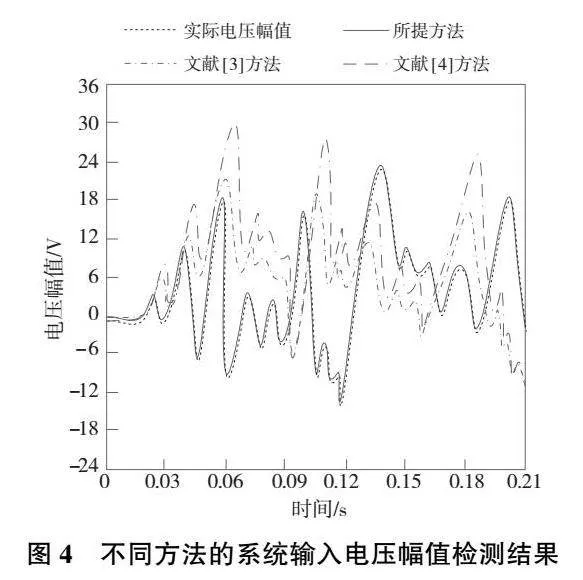
采用所提方法、文献[3]方法以及文献[4]方法开展电机伺服系统自抗扰控制,对电机伺服系统的电压幅值展开测试,测试结果如图4所示。
分析图4可知:开展步进电机驱动伺服系统自抗扰控制时,文献[3]方法以及文献[4]方法的测试结果与实际伺服系统电压幅值状态之间存在较大偏差。而所提方法与实际曲线几乎重合,说明所提方法能够精准检测出伺服系统的电压幅值状态,由此证明所提方法具有更高的控制精度。
2)系统状态扰动值测试
继续使用所提方法、文献[3]方法以及文献[4]方法开展电机伺服系统自抗扰控制。在开展伺服系统自抗扰控制过程中,若不能精准确定系统的负载扰动值,会直接降低系统自抗扰控制的控制效果。对3种方法在控制过程中检测出的系统扰动值展开测试,测试结果如图5所示。
分析图5可知,利用3种方法开展系统自抗扰控制时,仅有所提方法能够有效检测出系统的负载扰动,说明所提方法具有较好的控制效果。
3)自抗扰控制时间测试
基于上述测试结果,继续使用上述3种方法开展系统自抗扰控制。通过对上述3种方法的实际控制时间以及控制效果测试,检测不同方法的实际控制性能,结果如表1所示。
分析表1可知,随着系统中扰动的不断增加,3种方法检测出的控制时间都呈现出不同程度的上升趋势。当系统负载扰动为50kW时,所提方法的耗时仅为0.86s,说明所提方法具有较高的效率。
4)电机伺服系统输出功率检测
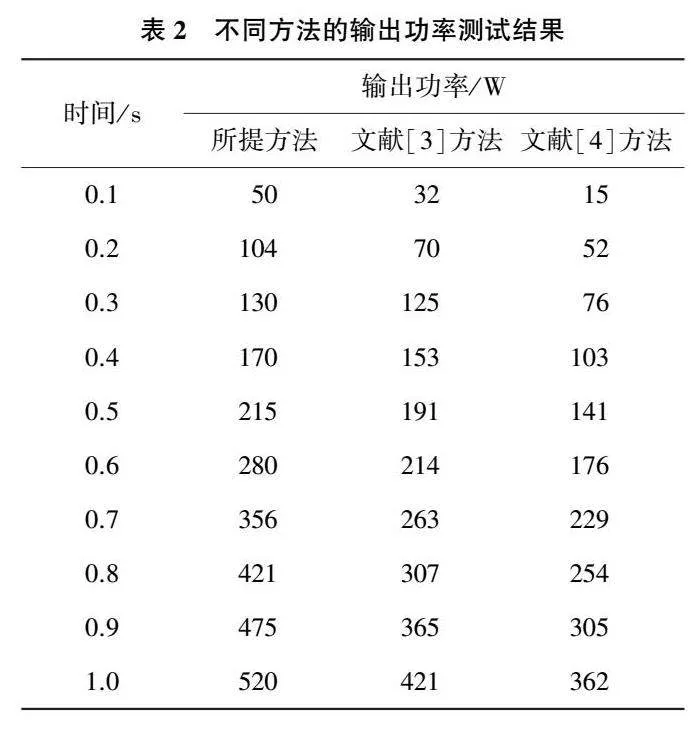
通过所提方法、文献[3]方法以及文献[4]方法开展电机伺服系统自抗扰控制,对电机伺服系统的输出功率展开测试。不同方法的系统输出功率幅值检测结果如表2所示。
分析表2可知:开展步进电机驱动伺服系统自抗扰控制时,第1.0s时,文献[3]方法以及文献[4]方法的输出功率分别为421W和362W;而所提方法的输出功率高达520W,说明所提方法更加高效,能够以较高的效率将输入能量转化为输出功率,最大限度地减少能量损耗。
5)步进电机转子位置测试
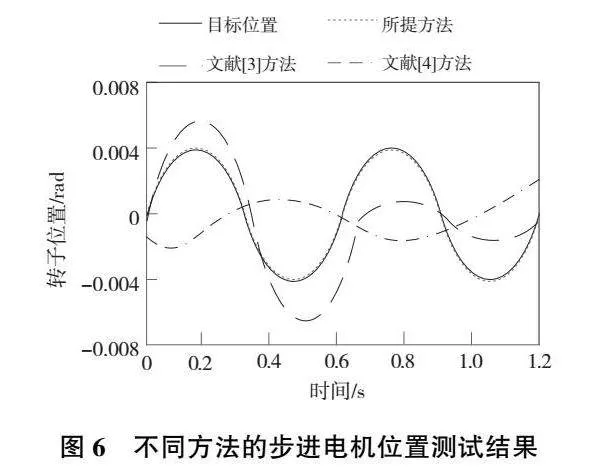
使步进电机按照设定的目标位置进行运动。对比不同方法的步进电机位置测试结果如图6所示。
分析图6可知,所提方法的伺服电机位置跟踪准确,与目标位置基本接近,说明所提方法具有较好的稳定性。
4结语
随着高精度步进电机使用范围的不断增加,对步进电机伺服系统开展复合自抗扰控制就显得尤为重要。为此,提出高精度步进电机机械驱动伺服系统复合自抗扰控制方法。基于步进电机伺服系统结构分析结果,明确系统各项参数并建立系统动力学模型,获取系统当前状态;以此为基础,设计一种自抗扰控制器;通过控制器完成电机伺服系统的自抗扰控制。通过实验证明该方法具有较高的控制精度、稳定性和效率,控制效果较好。
参考文献:
[1] 张曼玲,汪钊旭,穆旭阳,等. 基于单片机的步进电机控制系统探究[J]. 机电产品开发与创新,2023,36(3):133-135,145.
[2] 陈薇薇,郭默佳,张洪岩. 混合式步进电机自定位转矩的二维有限元仿真设计研究[J]. 微特电机,2022,50(8):23-26,30.
[3] 张臻,周扬忠. 永磁同步电机位置伺服系统改进变结构自抗扰控制[J]. 仪器仪表学报,2022,43(5):263-271.
[4] 蔡改贫,周小云,刘鑫. 改进PSO算法优化的电液位置伺服系统自抗扰跟踪控制[J]. 机械科学与技术,2021,40(12):1904-1912.
[5] 冯宾,樊卫华. 基于摩擦补偿的直流伺服系统变增益自抗扰控制器[J]. 电机与控制应用,2023,50(1):35-43.
[6] 蒋赟,陈机林,侯远龙,等. 基于AFSMC的步进电机伺服系统控制研究[J]. 电气自动化,2020,42(2):90-93.
[7] 史耕金,李东海,丁艳军. 基于概率鲁棒的改进自抗扰控制器设计[J]. 综合智慧能源,2022,44(10):57-64.
[8] 蒲明,刘鹏,熊皑. Fal函数的改进及3种新型非线性扩张状态观测器[J]. 控制与决策,2021,36(7):1655-1662.
[9] 赵丽,希望·阿不都瓦依提. 基于锁相环的改进型滑膜频率偏移孤岛检测法[J]. 计算机仿真,2022,39(10):104-108,293.
收稿日期:20230807
基金项目:2023年江苏高校\"青蓝工程\"优秀青年骨干教师培养对象资助项目(2023JS-07);2023年度江苏高校哲学社会科学研究一般项目(2023SJYB0826);2023年度南京机电职业技术学院种子基金项目(LD202301)
第一作者简介:袁芬(1983—),女,江苏南京人,讲师,硕士,研究方向为电气自动化,yb789456456@yeah.net。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.049
