
基于IPOA和PIDD2⁃FOI的电力系统负荷频率控制
2024-12-18 00:00:00王勇高红亮李俊鲍新宇周瑞
现代电子技术 2024年24期









摘" 要: 对于互联电网的负荷频率控制而言,不合适的控制器或者不合适的控制器参数选择会严重降低电网在遭遇负荷扰动时的稳定性,因此,选择合适的控制器并进行有效的参数整定十分重要。针对两个区域互联电网的负荷频率控制问题,设计一种带一阶惯性环节和滤波系数的PID加二阶导数控制器(PIDD2⁃FOI)。为了更好地寻找控制器的最优参数,基于Tent混沌映射对鹈鹕优化算法进行改进,并将经过改进的鹈鹕优化算法(IPOA)与其他算法在不同的测试函数下进行对比。结果表明,改进的鹈鹕优化算法不易陷入局部最优,具有更好的寻优效果。再以时间乘绝对误差积分(ITAE)准则作为目标函数,采用IPOA同时进行多种控制器参数优化,在多种干扰情形下对比不同控制器的控制效果。对比结果表明,所设计的PIDD2⁃FOI控制器具有更优越的控制能力,可以有效地维持系统的频率和联络线交换功率的稳定。
关键词: 鹈鹕优化算法; Tent混沌映射; 互联电力系统; 负荷频率控制; PID控制器; 二阶导数控制器; ITAE准则; 参数寻优
中图分类号: TN876⁃34; TM732" " " " " " " " " "文献标识码: A" " " " " " " " " " "文章编号: 1004⁃373X(2024)24⁃0109⁃06
Power system LFC based on IPOA and PIDD2⁃FOI
WANG Yong, GAO Hongliang, LI Jun, BAO Xinyu, ZHOU Rui
(School of Electrical Engineering and Automation, Hubei Normal University, Huangshi 435002, China)
Abstract: For the load frequency control (LFC) of interconnected power grids, unsuitable controller or inappropriate controller parameter selection can seriously reduce the stability of the power grid when when it encounters load disturbance. Therefore, selecting suitable controller and conducting effective parameter tuning is very important. A PID plus second⁃order derivative controller with first⁃order inertia and filter coefficient (PIDD2⁃FOI) is designed for the LFC of two regional interconnected power networks. In order to better find the optimal parameters of the controller, the pelican optimization algorithm (POA) is improved based on Tent chaotic mapping, and the improved pelican optimization algorithm (IPOA) are compared with other algorithms under different testing functions. The results show that the IPOA is not easy to fall into local optimal, and has better optimization effect. With the integrated time and absolute error (ITAE) criterion as the objective function, IPOA is used to optimize several controller parameters simultaneously, and the control effects of different controllers are compared under various interference conditions. The comparison results indicate that the designed PIDD2⁃FOI controller has superior control capability, which can effectively maintain the stability of the frequency of the system grid and the stability of exchange power of the tie line.
Keywords: pelican optimization algorithm; Tent chaotic mapping; interconnected power system; load frequency control; PID controller; second⁃order derivative controller; ITAE criterion; parameter optimization
0" 引" 言
互联电力系统由多个独立电力系统通过联络线连接构成,通过电力系统的互联可以优化电力资源的配置,提高电力资源供应的可靠性。电力系统的有功负荷变化、新能源的接入以及电力系统的故障等都会导致电力系统的频率发生改变。维持系统的频率稳定是电力系统的主要任务之一,但互联电力系统包含多个互联区域,更容易发生频率波动,因此对于互联电力系统的频率稳定研究具有重要意义。负荷频率控制(Load Frequency Control, LFC)作为一种维持电网频率稳定的常用手段[1⁃2],还可以有效维持联络线交换功率的稳定。
一个良好的LFC控制器能降低负荷扰动对系统造成的影响,使系统频率和联络线交换功率迅速恢复到稳定状态。近年来,国内外学者不断设计和完善LFC控制器,以尽可能地提高系统的动态响应性能。文献[3]提出了一种基于辅助反馈改进的负荷频率滑模控制器,并证明了该控制器对于系统的抖振有很好的抑制作用。文献[4]将在线强化学习的方法用于电力系统的负荷频率控制,加强了控制器对电力系统的自适应性。文献[5]将变论域模糊逻辑应用于LFC,提出了变论域模糊PI控制,其相较于PI控制器和模糊PI控制器有更好的控制效果。文献[6]将分数阶比例积分和分数阶比例微分进行级联,设计了FOPI+FOPD级联控制器,相较于传统的PID控制器和分数阶PID控制器,所设计的控制器能更好地抑制频率波动。文献[7]在TID(Tilt Integral Derivative)控制器的基础上做了改进,设计了ID⁃T控制器。文献[8]基于TID和FOPID设计了一种混合控制器,取得了不错的控制效果。文献[9]提出了一种含滤波系数和一阶惯性环节的PID控制器,并证明了所提控制器的有效性。此外,一些串级控制的思想也被应用于互联电网的负荷频率控制。文献[10⁃12]分别采用(1+PD)⁃PID、PI⁃(1+PD)和带滤波系数的PD⁃PI的串级控制方式,验证了采用串级控制可以有效提高系统的鲁棒性。
参数的整定是LFC控制器设计的重要内容之一,目前学者们采用了多种智能优化算法来寻找各种控制器的最优参数。文献[13⁃17]分别采用改进的粒子群优化算法、权重双Q⁃时延更新算法、改进的引力搜索算法、鲸鱼优化算法和改进协同量子粒子群算法来优化控制器参数,虽然这些算法在控制器参数的优化过程中取得了一定的效果,但算法收敛速度慢、易陷入局部最优等问题依然存在。
本文基于Tent混沌映射改进的鹈鹕优化算法(IPOA),设计一种带一阶惯性环节和滤波系数的PID加二阶导数控制器(PIDD2⁃FOI)。基于Tent混沌映射改进的鹈鹕优化算法具有不易陷入局部最优、收敛速度快、优化结果准确度高等优点,本文该算法同时优化不同的控制器,通过对比分析它们在多种干扰情况下的控制效果,最终证明所提出的PIDD2⁃FOI控制器具有最优的控制能力。
1" 负荷频率控制模型
负荷频率控制能够在系统受到负荷扰动后,将系统的频率保持在正常范围。对于互联电力系统而言,负荷频率控制不仅需要保证单个区域的发电功率和负荷的平衡,还要尽可能地保证区域间联络线功率的稳定。本文主要研究两区域互联电力系统的负荷频率控制问题。
两区域互联电力系统的模型结构如图1所示,每一区域都是由调速器、汽轮机、控制器、发电机及其负荷等构成。模型中Bi和Ri分别表示第i个区域的频率偏差系数和调差参数;Tgi和Tti分别表示第i个区域的调速器和汽轮机的时间常数;Tpi和Kpi分别表示第i个区域的电力系统时间常数和有功功率转换系数;ΔPtie12表示区域1和区域2之间的联络线功率偏差;Δfi表示第i个区域的频率偏差;ΔPdi为第i个区域的负荷变化[1]。
2" 鹈鹕优化算法及其改进
2.1" 鹈鹕优化算法
鹈鹕优化算法(Pelican Optimization Algorithm, POA)[18]于2022年由Pavel Trojovský等人提出,是一种种群优化算法,主要模拟鹈鹕捕食猎物的行为。POA的主要内容如下。
1) 对鹈鹕种群进行初始化。种群中每一只鹈鹕的位置都对应着所求问题的一个待定解,设置种群大小为n,最大迭代次数为T,并根据所求问题的变量个数和变量范围对种群进行初始化。其中变量的个数为m,对应着鹈鹕位置的空间维数。初始化过程对应的公式为:
[xi,j=lbj+rand·(ubj-lbj)," i=1,2,…,n;j=1,2,…,m] (1)
式中:[xi,j]表示第i只鹈鹕的第j维位置;[ubj]和[lbj]分别表示第j维位置的上下限。
2) 勘测阶段。鹈鹕进行勘测,勘测过程中确定猎物位置并根据猎物的飞行位置来更新自身位置。如果鹈鹕的位置对应的目标函数值大于猎物位置对应的目标函数值,则进行公式(2)的飞行:
[xP1i,j=xi,j+rand⋅(pj-I⋅xi,j)] (2)
式中I为1或2。
如果鹈鹕的位置对应的目标函数值小于猎物的位置对应的目标函数值,则进行公式(3)的飞行:
[xP1i,j=xi,j+rand⋅(xi,j-pj)]" "(3)
飞行后鹈鹕获得新的位置[XP1i],如果新位置对应的目标函数值小于原来位置的目标函数值,则更新其位置;否则不更新。
3) 开发阶段。鹈鹕在水面飞行,这一步是为了检查其附近的位置,以尽可能地收敛到更好的位置。对应的飞行公式为:
[xP2i,j=xi,j+R⋅(1-tT)⋅(2⋅rand-1)⋅xi,j]" "(4)
式中:R=0.2;t为当前迭代次数;T为最大迭代次数。
飞行后鹈鹕获得新的位置[XP2i],如果新位置对应的目标函数值大于原来位置的目标函数值,则不更新其位置;否则更新。
2.2" Tent混沌映射改进的鹈鹕优化算法
在鹈鹕优化算法中加入混沌映射是增强算法全局搜索能力的有效手段。原本的种群初始化过程中,个体是在给定空间内随机生成的,随机生成的个体容易在空间中分布不均,进而影响算法寻找全局最优解。利用混沌映射遍历性的特点对种群的初始化环节进行改进,可以使得初始化的种群分布更加均匀,算法搜索的范围也更加广泛,从而更有利于寻找全局最优解。混沌映射方法多种多样,如文献[19]采用Circle映射对鹈鹕算法进行改进,文献[20]采用Sin混沌映射对灰狼算法进行改进,文献[21]采用Kent混沌映射对麻雀搜索算法进行改进。以上研究均表明加入混沌映射后算法的性能得到了提升。
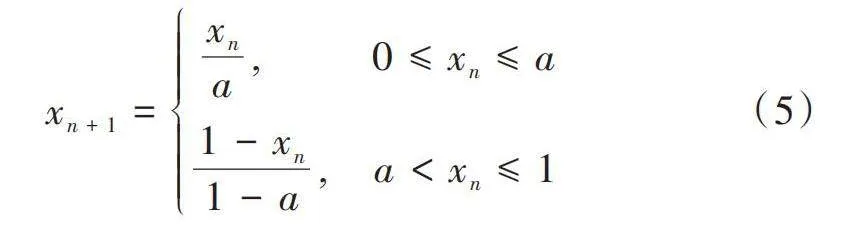
本文采用Tent混沌映射改进鹈鹕种群的初始化。Tent混沌映射的图像类似于一个帐篷,因此也称为帐篷映射。它是一个分段映射函数,表达式如下:
[xn+1= xna, " " " "0≤xn≤a1-xn1-a, alt;xn≤1] (5)
式中a的取值范围为(0,1)。
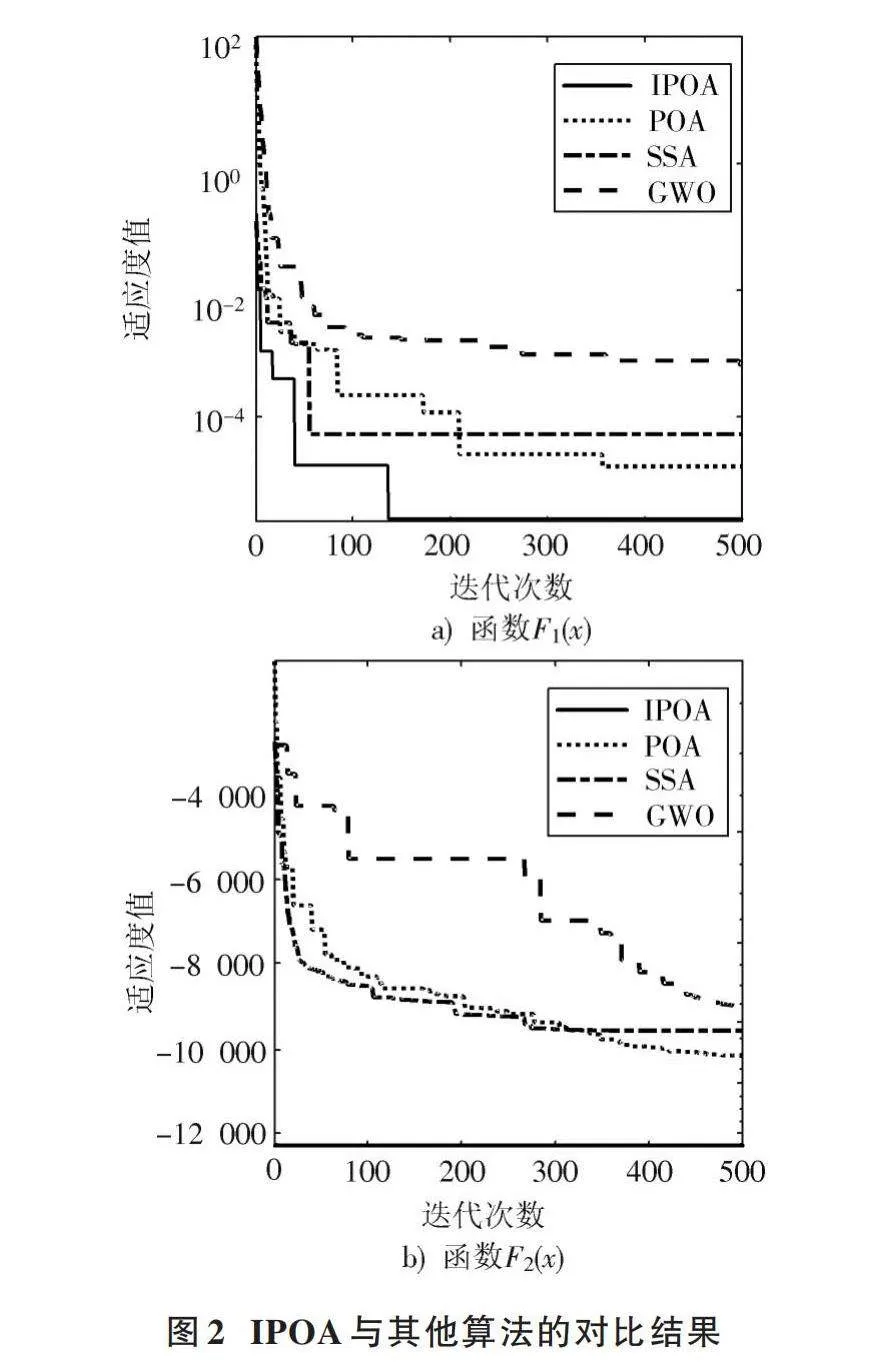
采用改进的鹈鹕优化算法(IPOA)、灰狼优化(GWO)算法、麻雀搜索算法(SSA)以及鹈鹕优化算法(POA)寻找测试函数[F1(x)]和测试函数[F2(x)]的最小值,这两种测试函数的变量个数均为30。算法的种群大小均设置为100,最大迭代次数均设置为500。IPOA与其他算法的对比结果如图2所示。函数[F1(x)]和[F2(x)]公式如下:
[F1(x)=i=1ni⋅x4i +rand[0,1), -1.28≤xi≤1.28] (6)
[F2(x)=i=1n -xi⋅sinxi," -500≤xi≤500] (7)
通过图2的对比结果可以看出,IPOA具有更快的收敛速度和更精准的最优解。
3" 控制器设计及目标函数的选择
3.1" PIDD2⁃FOI控制器的设计
文献[9]在PID控制器中加入了滤波系数和一阶惯性环节,并通过实验验证了加入一阶惯性环节可显著增强控制器的控制效果。文献[22]提出了PID加二阶导数控制器(PIDD2),用于电力系统的自动电压调节。文献[23]将分数阶型PIDD2控制器应用于电力系统负荷频率控制,取得了显著的效果,这证明了PIDD2控制器可更有效地实现对电力系统负荷频率的控制。
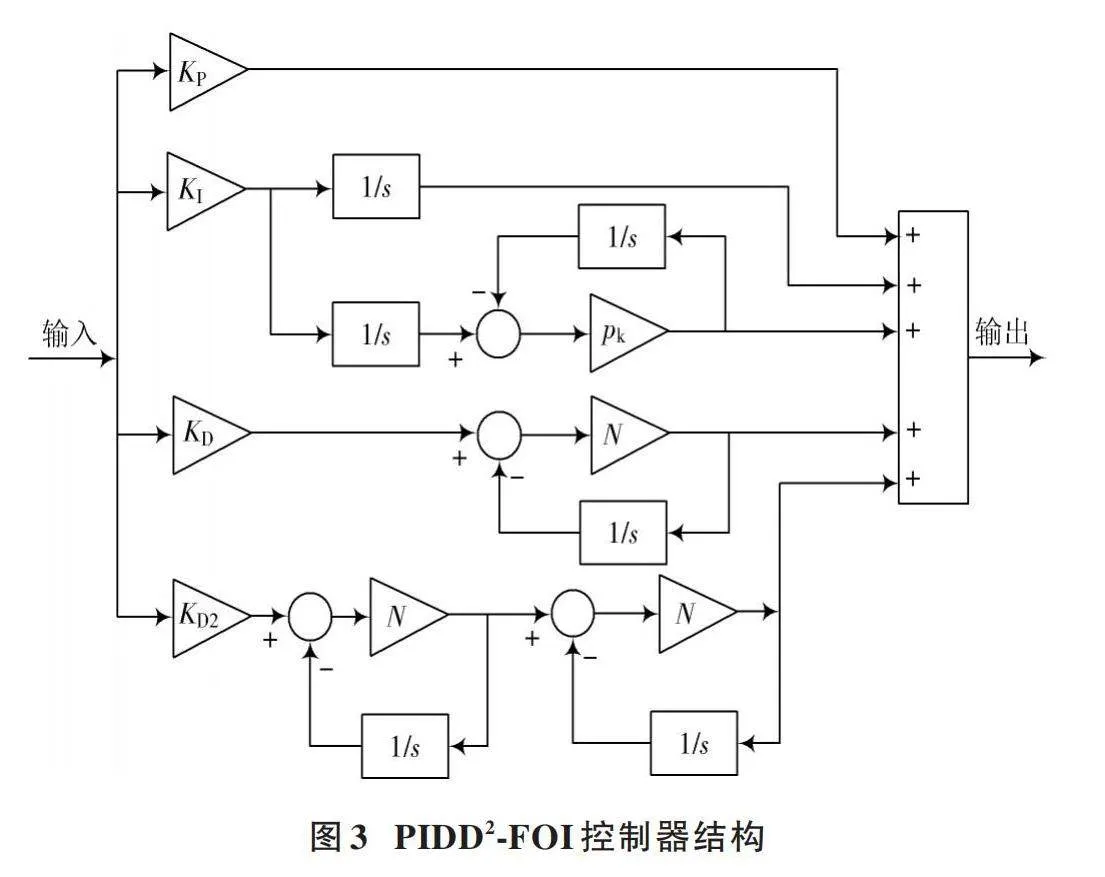
基于以上文献研究,本文在PIDD2控制器中加入了一阶惯性环节和滤波系数,提出了PIDD2⁃FOI控制器。PIDD2⁃FOI控制器由比例环节、积分环节、微分环节、二阶微分环节和一阶惯性环节构成,并包含滤波系数。加入滤波系数的作用是避免一阶微分和二阶微分环节带来的噪声放大问题,加入一阶惯性环节的作用是增强系统的惯性能力。由Simulink搭建PIDD2⁃FOI控制器的结构如图3所示。图3中KP、KI、KD、KD2、pk和N分别代表比例系数、积分系数、微分系数、二阶微分系数、惯性时间常数的倒数和滤波系数。
所设计控制器的传递函数为:[Gs=KP+KIs+KD⋅N1+N⋅1s+KD2·" " " " " " "N1+N⋅1s2+KI⋅pks+pk] (8)
式中滤波系数N取100。
3.2" 目标函数
目标函数的选择对于控制器的参数优化十分重要,不合适的目标函数会导致参数的优化结果不理想。本文采用时间乘以绝对误差的积分(ITAE)作为系统的目标函数,ITAE的函数表达式如下:
[ITAE=0tst·e(t)dt]" (9)
式中ts表示系统仿真时间[24]。
由于两区域互联电力系统的误差主要包含[Δf1]、[Δf2]和[ΔPtie12]三部分,所以算法的目标函数表达式为:
[min" J=0tst·Δf1+Δf2+ΔPtie12dt] (10)
4" 仿真算例
本文基于Simulink搭建两区域互联电力系统的负荷频率控制模型,分析采用不同控制器时区域1的频率偏差、区域2的频率偏差以及联络线功率偏差的响应曲线。采用IPOA同时优化PI、PID、PIDD2、PID⁃FOI和PIDD2⁃FOI控制器的参数,以及区域1中控制器1的参数和区域2中控制器2的参数。
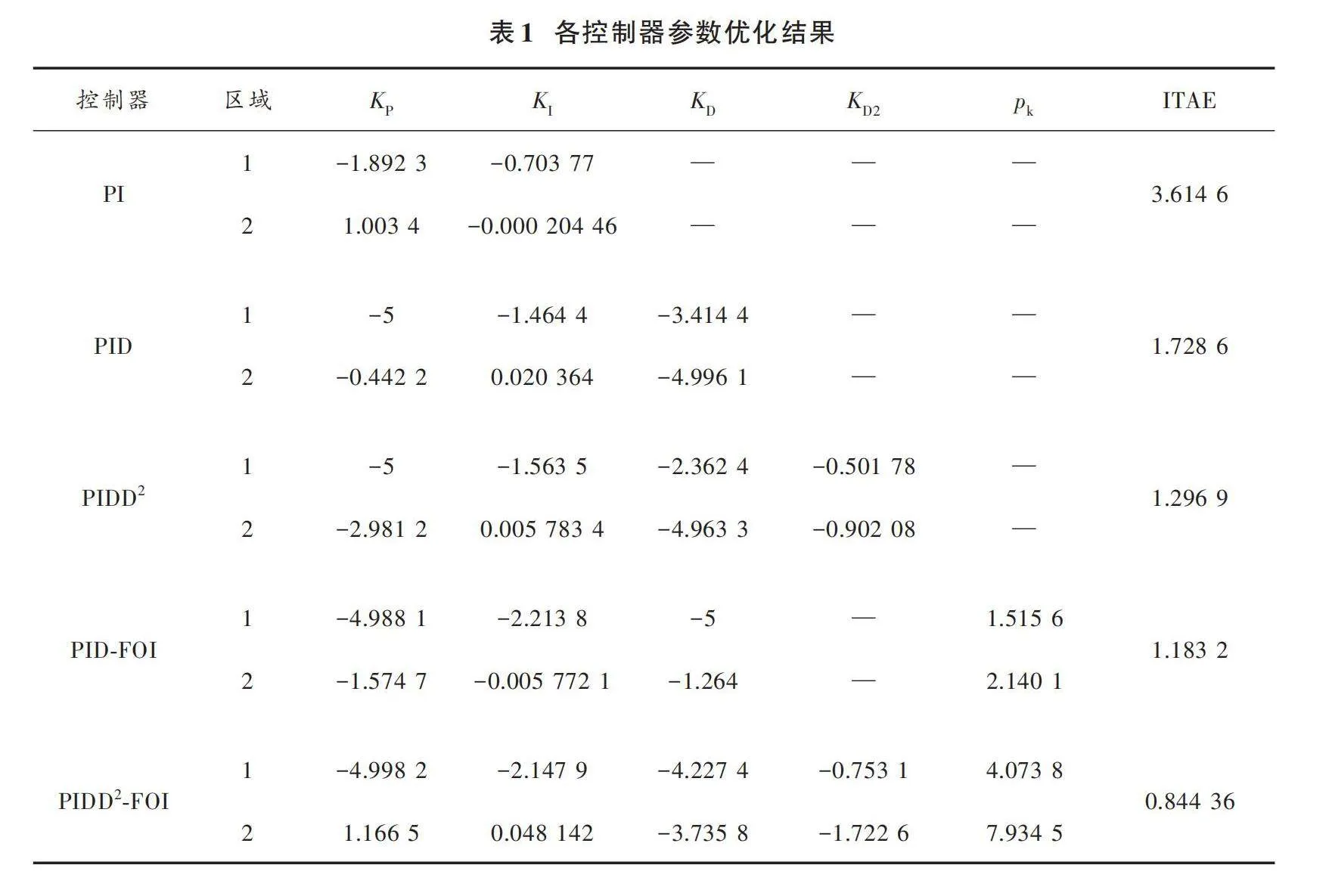
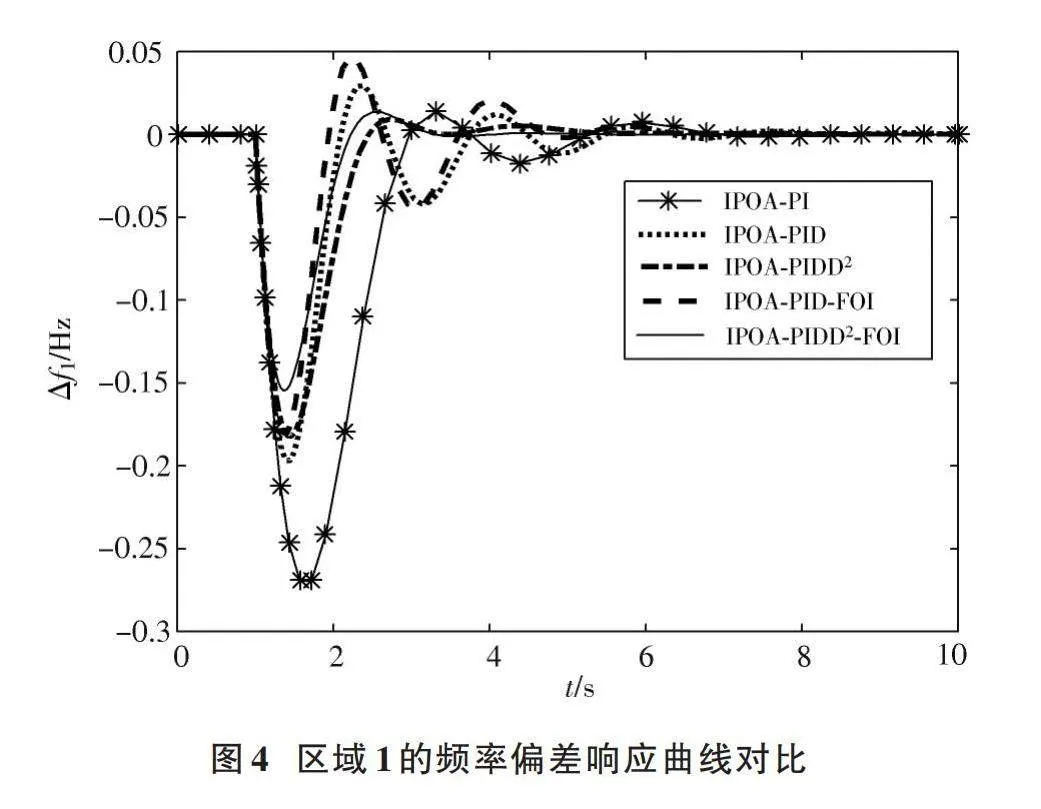
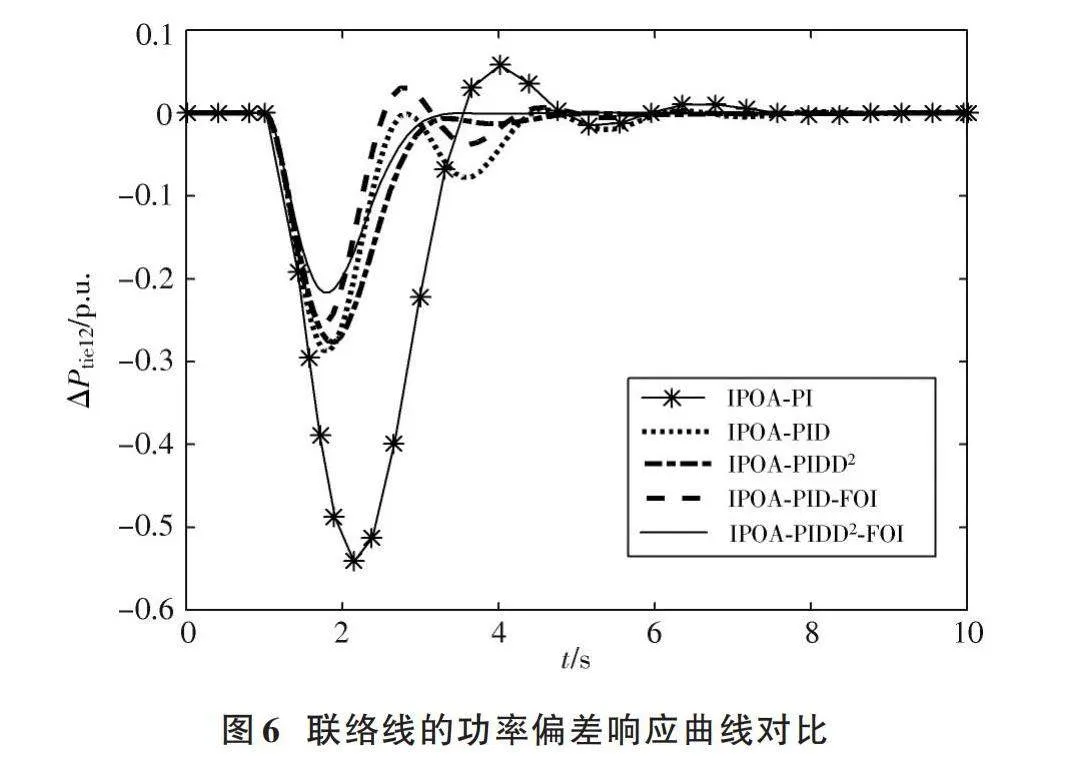
IPOA的基础参数设置如下:种群大小为30,最大迭代次数为100。将这5种控制器中的比例系数KP、积分系数KI、微分系数KD、二阶微分系数KD2的搜索范围均设置为[-5,5],pk的搜索范围设置为[1,10],对比分析当区域1在第1 s遭受阶跃扰动时5种控制器的控制效果。控制器参数优化结果如表1所示。区域1的频率偏差、区域2的频率偏差以及联络线功率偏差的响应曲线对比分别如图4~图6所示。
从参数优化结果来看,采用PIDD2控制器优化后的ITAE值要优于PID控制器,且在加入一阶惯性环节后,PID和PIDD2控制器优化的ITAE值进一步降低。这5种控制器中,PI控制器对应的ITAE值最高,而PIDD2控制器对应的ITAE值最低。
由图4~图6可以看到,5种控制器均能保证两区域的频率偏差和联络线功率偏差恢复到0,其中PI和PIDD2⁃FOI控制器分别对应着最差和最优的控制效果。无论是两个区域的频率还是联络线的功率,PI控制器均具有最大的偏差以及最长的偏差消除时间,PIDD2⁃FOI控制器则同时具有最小的偏差和最短的偏差消除时间。
由以上对比结果可以看出,本文设计的PIDD2⁃FOI控制器均具有最优的响应性能。当采用PIDD2⁃FOI控制器时,区域1和区域2的最大频率偏差以及联络线的最大功率偏差均为最低。虽然5种控制器都能使得区域频率偏差和联络线功率偏差恢复到0,但对比而言,PIDD2⁃FOI控制器明显具有最快的响应速度。综上所述,本文设计的PIDD2⁃FOI控制器具有最优的控制效果。
5" 结" 论
针对两区域互联电力系统的负荷频率控制问题,本文设计了一种含一阶惯性环节和滤波系数的PIDD2⁃FOI控制器。采用IPOA对包括PIDD2⁃FOI在内的多种控制器的参数进行整定和对比,结果表明:采用IPOA并选择ITAE性能指标时,可以有效优化控制器的参数;本文设计的PIDD2⁃FOI控制器相较于PID等控制器具有更优越的控制效果,它可以明显地抑制波动、减小偏差并加快系统恢复到稳定状态。
注:本文通讯作者为高红亮。
参考文献
[1] 左剑,谢平平,李银红,等.基于智能优化算法的互联电网负荷频率控制器设计及其控制性能分析[J].电工技术学报,2018,33(3):478⁃489.
[2] 陈宗遥,卜旭辉,郭金丽.基于神经网络的数据驱动互联电力系统负荷频率控制[J].电工技术学报,2022,37(21):5451⁃5461.
[3] 郭欢,王锡淮.改进多区域互联电力系统负荷频率滑模控制[J].控制工程,2021,28(5):944⁃948.
[4] 杨丽,孙元章,徐箭,等.基于在线强化学习的风电系统自适应负荷频率控制[J].电力系统自动化,2020,44(12):74⁃83.
[5] 李志军,王硕,张家安,等.基于变论域模糊逻辑的互联电力系统负荷频率控制[J].电力系统保护与控制,2021,49(16):151⁃160.
[6] 崔明勇,曹朋,朱大伟,等.基于FOPI+FOPD控制器的单区域电力系统频率控制及电压调节[J].燕山大学学报,2022,46(2):157⁃165.
[7] AHMED M, MAGDY G, KHAMIES M, et al. Modified TID controller for load frequency control of a two⁃area interconnected diverse⁃unit power system [J]. International journal of electrical power amp; energy systems, 2022, 135: 107528.
[8] MOHAMED E A, AHMED E M, ELMELEGI A, et al. An optimized hybrid fractional order controller for frequency regulation in multi⁃area power systems [J]. IEEE access, 2020, 8: 213899⁃213915.
[9] 符家骐.基于改进差分进化算法的两区域互联电力系统负荷频率控制[D].芜湖:安徽工程大学,2023.
[10] ÇELIK E, ÖZTÜRK N, ARYA Y, et al. (1+ PD)⁃PID cascade controller design for performance betterment of load frequency control in diverse electric power systems [J]. Neural computing and applications, 2021, 33(22): 15433⁃15456.
[11] 王育飞,程伟,薛花,等.基于串级PI⁃(1+PD)算法的含飞轮储能互联电网AGC控制器设计[J].电力系统保护与控制,2023,51(14):127⁃138.
[12] ABOU EL⁃ELA A A, EL⁃SEHIEMY R A, SHAHEEN A M, et al. Enhanced coyote optimizer⁃based cascaded load frequency controllers in multi⁃area power systems with renewable [J]. Neural computing and applications, 2021, 33: 8459⁃8477.
[13] 张成,张艳.新能源互联电力系统双积分反馈PID负荷频率控制[J].电力系统及其自动化学报,2022,34(10):73⁃80.
[14] 李彦营,席磊,郭宜果,等.基于权重双Q⁃时延更新学习算法的自动发电控制[J].中国电机工程学报,2022,42(15):5459⁃5471.
[15] 李牧青,肖健梅,王锡淮.基于改进引力搜索算法的负荷频率自抗扰控制[J].控制工程,2023,30(6):1036⁃1044.
[16] 郭强,薛志伟,芦晓辉,等.含风光水火储的多区域互联电力系统协同优化负荷频率控制[J].热力发电,2023,52(3):136⁃143.
[17] 方仍存,桑子夏,刘知行,等.基于改进协同量子粒子群算法的多微网负荷频率控制[J].电力建设,2023,44(7):87⁃97.
[18] TROJOVSKÝ P, DEHGHANI M. Pelican optimization algor⁃ithm: a novel nature⁃inspired algorithm for engineering applications [J]. Sensors, 2022, 22(3): 855.
[19] 高猛,曾宪文.基于VMD⁃ESA和IPOA⁃XGBOOST相结合的异步电机故障诊断[J].现代电子技术,2024,47(2):115⁃120.
[20] 田国富,张毅,姜娇.基于改进灰狼算法的机械臂运动学高精度逆解[J].组合机床与自动化加工技术,2023(10):59⁃63.
[21] 姜春英,张熙然,王印超,等.基于改进麻雀搜索算法的平面度误差评定方法[J].计量学报,2023,44(9):1360⁃1368.
[22] SAHIB M A. A novel optimal PID plus second order derivative controller for AVR system [J]. Engineering science and technology, an international journal, 2015, 18(2): 194⁃206.
[23] KHOKHAR B, DAHIYA S, PARMAR K P S. A novel fractional order proportional integral derivative plus second⁃order derivative controller for load frequency control [J]. International journal of sustainable energy, 2021, 40(3): 235⁃252.
[24] MOUSAKAZEMI S M H. Comparison of the error⁃integral performance indexes in a GA⁃tuned PID controlling system of a PWR⁃type nuclear reactor point⁃kinetics model [J]. Progress in nuclear energy, 2021, 132: 103604.
作者简介:王" 勇(1998—),男,山东潍坊人,在读硕士研究生,研究方向为智能控制在电力系统中的应用。
高红亮(1979—),男,湖北黄冈人,博士研究生,教授,研究方向为智能控制、鲁棒控制、电力系统稳定性分析与控制等。
猜你喜欢
作文·小学低年级(2025年1期)2025-01-19 00:00:00
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
小哥白尼(野生动物)(2018年12期)2018-12-18 02:02:20
小哥白尼(野生动物)(2018年3期)2018-06-15 08:52:08
系统医学(2016年8期)2016-02-20 02:55:08
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
电子设计工程(2014年17期)2014-02-27 11:59:52
