
基于信息分级处理的分布式多源侦察方法研究
2024-12-17 00:00:00陈雪陈菊兰赵新路
郑州航空工业管理学院学报 2024年6期
关键词:分布式
摘 要:针对复杂环境和单一传感器信息的不确定性问题,采用有人/无人多传感器分布式协同侦察及信息融合的方法可解决复杂战场态势感知问题。通过分析多源异构传感器信息融合的特点,将信息分级处理模型应用于分布式多源侦察任务中,设计信息融合的总体框架、功能模型和层次模型,凝练多源信息处理的流程步骤,面向岛礁分布式协同侦察典型任务设计分级信息处理流程并进行仿真计算分析;凝练多源信息融合信息分级处理中的关键技术,旨在促进信息融合技术的快速发展,为我国武器装备体系发展和建设提供一定参考。
关键词:信息分级;分布式;多源信息融合;协同侦察;处理模型
中图分类号:E926.3;E91" 文献标识码:A" 文章编号:1007 - 9734 (2024) 06 - 0103 - 07
0 引 言
随着信息化战争的不断进阶,各种颠覆性技术驱动着现代战争武器装备的换代升级,异构平台之间的协同作战迫在眉睫。而有人/无人协同作战就是典型多域战(Multi-Domain Operation)[1]的作战样式,美、欧等军事强国开展了一系列面向有人/无人协同作战的作战理论研究和关键技术实践,而分布式协同侦察是协同作战体系中相当重要的一环。
复杂的战场环境使得协同作战系统中对情报收集和战场态势的感知变得尤为重要。由于技术的限制,使用单一传感器提供的信息具有大量的不确定性,使得指控系统做出的决策有可能是不准确的,所以需要采用多源信息融合技术对异构多平台多传感器获取的感知信息进行合成、互补等综合验证,以提高多传感器平台对复杂环境中目标的识别、定位及精确打击能力[2]。同时,需要对多源融合的信息进行合理分级处理,提高情报处理的快速性、准确性和可靠性。
围绕多域无人协同作战下的多源信息融合分级处理问题,国内外研究人员开展了一定的研究工作。美国国防部JDL(Joint Directors of Laboratories)通过建立多源信息融合三级模型[2-3],对多源信息融合技术在作战中更好的应用提供了一种较为通用的框架,得到了广泛使用。在信息融合层次方面,化柏林等[4]指出信息融合是在几个层次上完成对多源信息的处理过程,信息融合的结果包括较低层级的状态估计和较高层级的战术态势估计;曹建军[5]等将信息融合划分为像元级融合、目标级融合以及决策级融合3个层次;Hu等[6]把信息融合划分为数据层、特征层、相似度层和决策层融合4个层次。
本文针对分布式协同作战系统中多源异构侦察平台设计多源信息融合总体框架,建立多级功能模型、层次模型及分布式协同侦察系统信息分级处理模型,根据信息分级处理技术,设计面向典型任务的作战侦察系统多源异构信息融合处理流程,提炼出基于多源信息融合的分布式协同侦察作战信息分级处理系统的关键技术。[7]
1 多源信息融合原理
多源信息融合的目的主要包括:融合检测、状态估计、属性识别,等。
其中检测融合是利用多传感器进行信息融合分析处理,消除单个传感器或单类传感器检测的不确定性,从而提高检测系统的可靠性,得到对检测目标更准确的判断和认识。由于不同类型传感器对不同信号敏感,利用单个传感器检测信息缺乏对多源信息的协同利用、综合处理,致使检测对象的系统性和整体性无法充分考虑,为解决这个难题,目前的方法是通过使用多个传感器共同检测,获取不同的纬度信息,并用一定的规则策略对信息进行融合处理,从而提高结果的可靠性、准确性和实用性[7]。
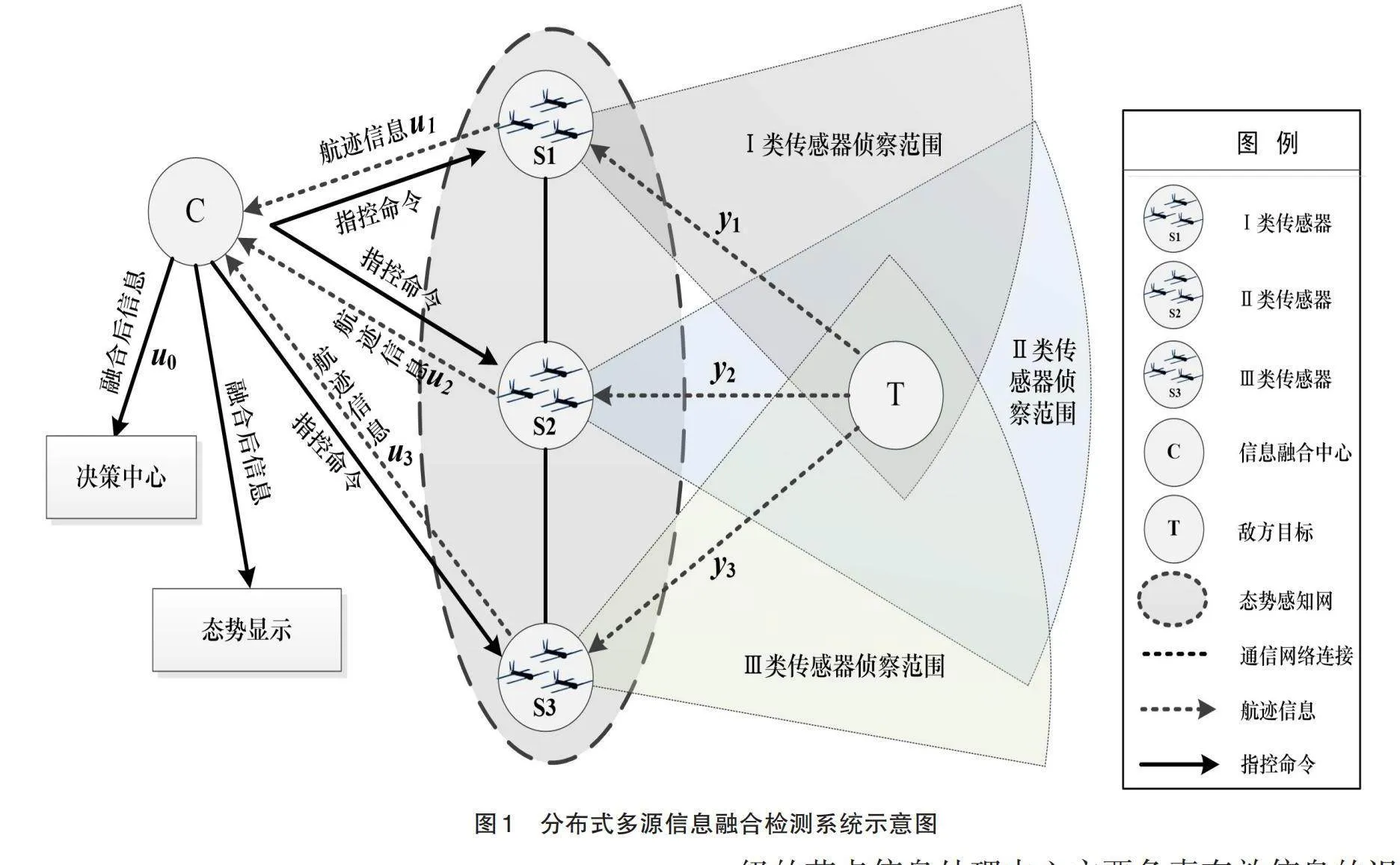
多传感器目标检测的融合结构主要有集中式和分布式两种[8-9]。集中式的核心是一个数据融合中心,它收集各个或各类传感器的数据,并且具有一些固定的规则或算法。在这里,可以汇总全部初始数据,根据需要来筛选、关联及合成等,最终输出数据融合的结果,集中式结构的特点是数据全面、信息全面、置信度较高,但面对多个传感器数据时,输出数据量将会变得愈加庞大,拉长信息处理的必需时长,导致数据融合中心计算量过大且响应速度慢。分布式结构,其核心思想是在每个节点,即单个传感器处,都预先对采集到的原始观测数据进行预处理,做出本地决策结果,然后只把本地决策结果或经初步处理后得出的某种置信度不高的结果及有关信息发送至数据融合中心,接着由融合中心在更高层级中结合更多的数据作为参考,再做进一步的融合、对比和关联,得到最终决策结果。这种分布式结构,使得网络传输的数据量比集中式少很多,因此可以相应地降低传输网络的要求,同时还具有数据融合处理时间短、响应速度快,适应性强等优点,所以分布式数据融合检测系统更常用,典型的分布式融合检测系统如图1所示。若某作战系统由红外、CCD、GPS、雷达、声呐等多个异构传感器组成,每个传感器作为一个基础节点,任务是探测被检测目标,得到相应的观测值,完成该节点的决策任务,然后将决策结果传递至更高一级节点,即数据融合中心。融合中心根据接收到的各个基础节点的局部决策,按照确定的某种融合规则进行多源数据信息融合并做出最终决策。
2 信息分级处理框架模型设计
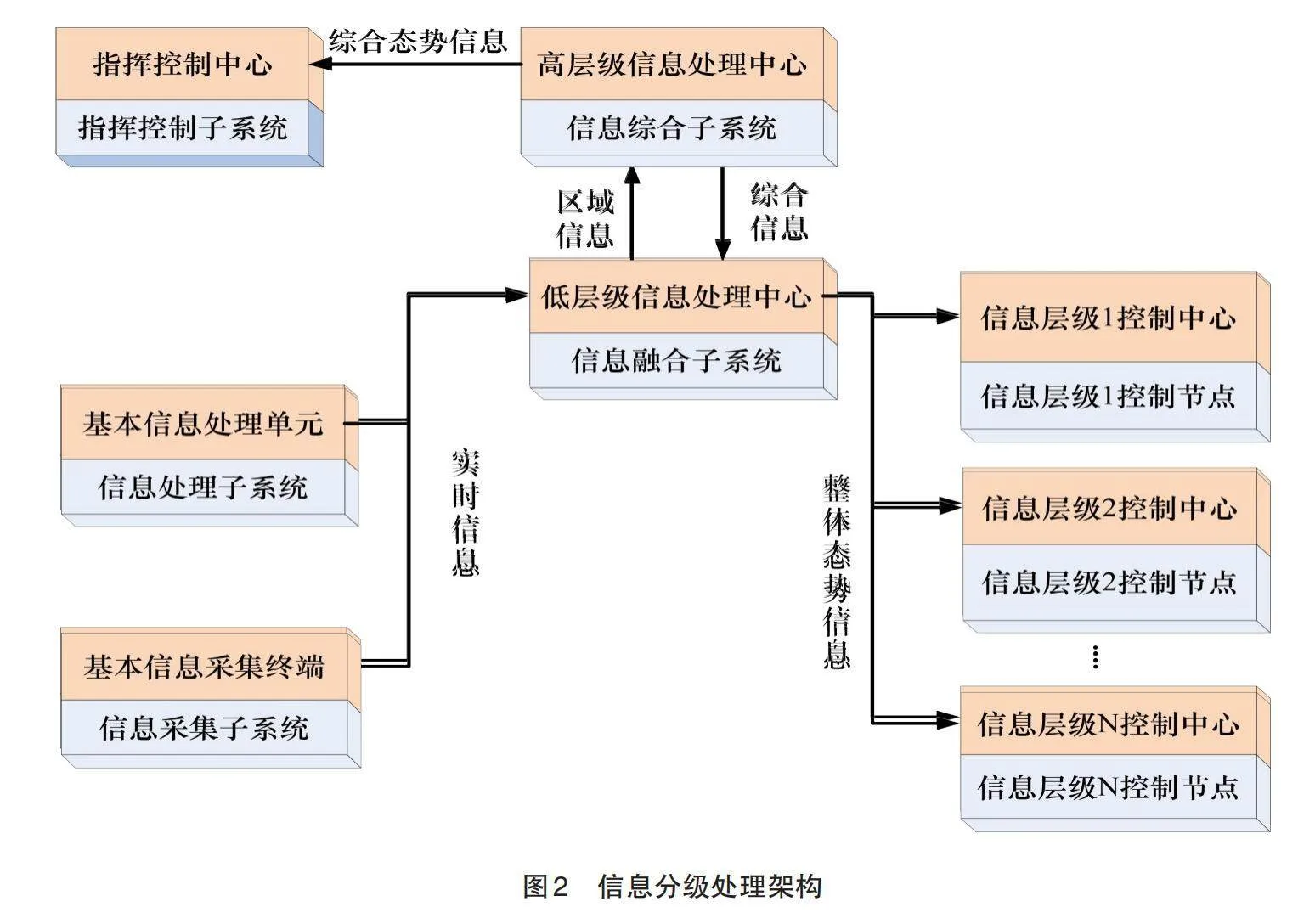
针对分布式多源信息融合任务,为使所有节点能够有效汇总、共享和使用指控信息,可在高层级的核心节点处设置信息处理中心,如图2所示。低层级的节点信息处理中心主要负责有效信息的识别和抽取,将指挥控制中的各类信息进行识别并融合;高层级的节点信息处理中心则主要负责将下属层级节点上传的信息进行综合处理和关联,从而实现作战系统的信息共享[10]。
2.1" 信息融合功能模型
分布式协同侦察作战任务过程中,各作战域侦察平台从执行侦察任务开始,多源信息融合过程一般需要经过目标定位、目标识别、态势评估、威胁估计等步骤。
侦察平台集群感知识别与定位分别完成对目标的信号级(0级)信息融合,若要形成准确的目标态势信息,还需完成对象估计(1级)信息融合过程,并提供给2级融合生成综合态势,然后将融合结果提供给3级融合生成威胁估计,4级融合通过对传感器的管理实现信息交互的优先级和数据搜索检测方法,5级融合通过对之前多级融合结果进行分析,将结果传递给指挥控制系统,完成对信息融合结果的访问、检索和显示。
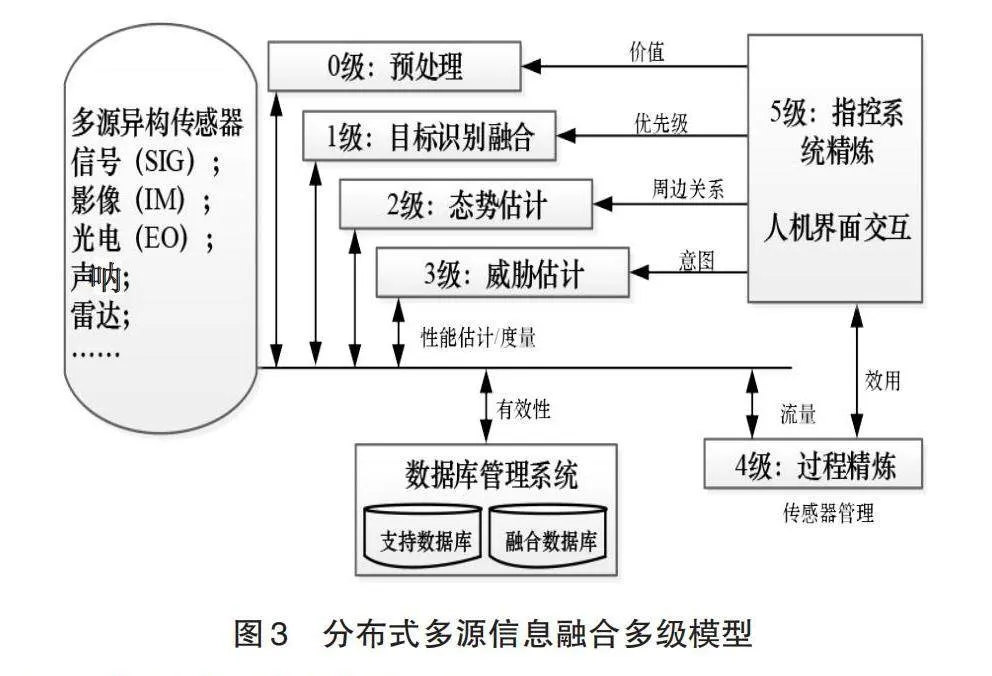
分布式多源信息融合多级模型如图3所示,(0~5)级信息融合具体功能描述如下:
0级:预处理。基于像素/信号级数据关联(信息系统收集),估计和预测可观测的信号/实体。
1级:目标识别融合。对多源异构传感器的目标识别数据进行组合分析,以期达到对目标身份的联合估计。
2级:态势估计。估计和预测实体之间的关系,包括兵力结构、兵力关系、通信等。态势估计是在1级目标识别融合的基础上与增加的外部关系信息进行融合,得到对手的兵力结构估计情况,预测下一步行为动作,逐步形成战场环境态势图,为最优决策提供依据。
3级:威胁估计。在态势估计的基础上,综合分析敌方的作战能力(破坏能力、机动能力)、动作趋势(运动模式、行为意图)的先验知识,通过分析估计下一步作战可能出现的烈度(程度和严重性等),定量表示出敌方作战能力并对估计结果做出指示和告警。
4级:过程精炼管理。作为一个资源管理的重要单元,根据需要主动进行数据收集和处理,以支持传感器管理以及对传感器和信息的控制。为了有效控制传感器,应给出传感器服务优先级和数据搜索检测方法,并确定探测任务的调度和监视方案。
5级:指控系统精炼管理。基于人机界面交互设计,作为知识管理元素,实现自适应,完成确定信息来源、访问信息来源、自适应检索和显示的功能。
2.2" 信息融合层次模型
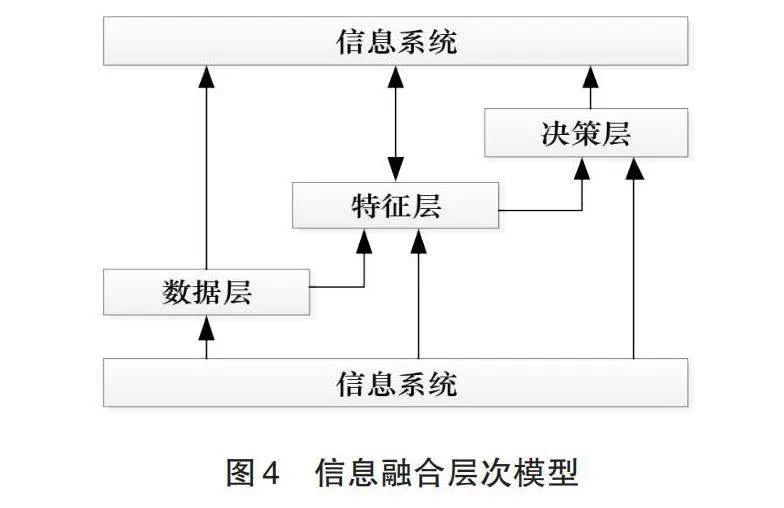
多源信息融合可以在数据层、特征层和决策层与具体技术相结合[8-10]。信息融合的层次模型如图4所示。
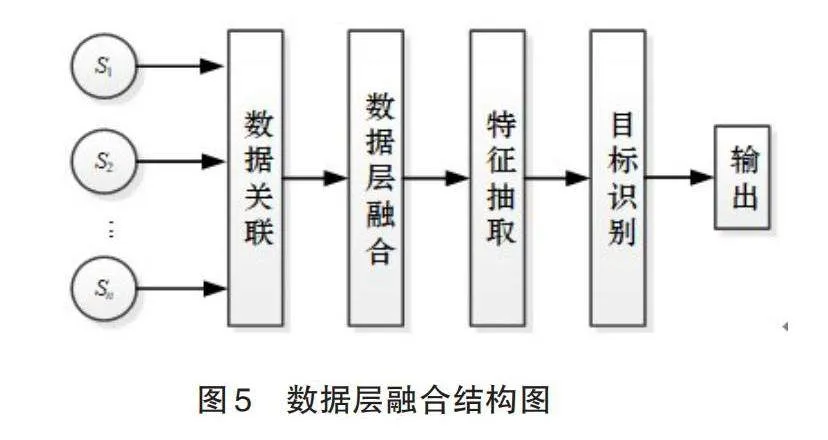
数据层的融合是最低级的数据融合,主要是处理同构传感器发来的数据,通过对多个传感器采集到的数据信息进行直接的融合处理,实现对融合完成的结果进行特征提取和决策判断。数据层融合处理的方法能使数据量损失较少,能够提供其他层级不能提供的原始信息,精确度较高。数据层融合结构如图5所示。
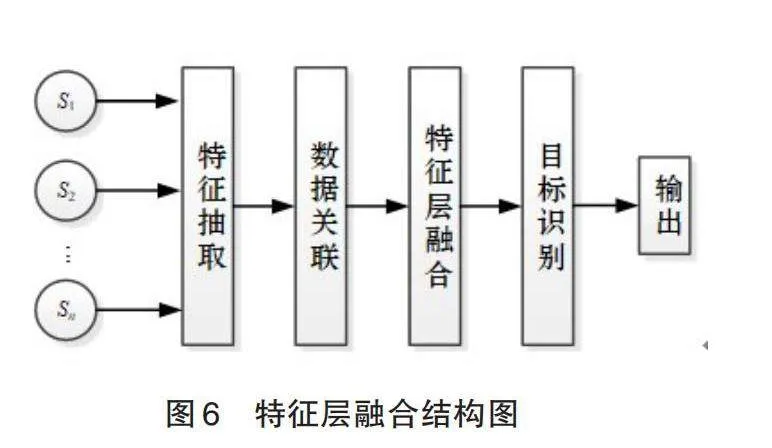
特征层融合的方法是通过从多源异构传感器所采集的原始数据中抽取出一组特征信息,然后对各组特征信息进行数据关联和融合,进行目标识别后得到目标的行为、性能及功能等典型特征。融合的主要步骤如下[11]:
首先,将设定含有量纲的属性映射到[0,1]区间,得到无量纲的量,将无量纲的量和映射各个属性的信任度进行对比;然后,对反映各个属性的信任度按照特定的融合规则进行信息融合,得出能反映各备选方案的信任度的量化结果;最后,根据特征层融合的结果做出相应的决策。特征层融合结构如图6所示。
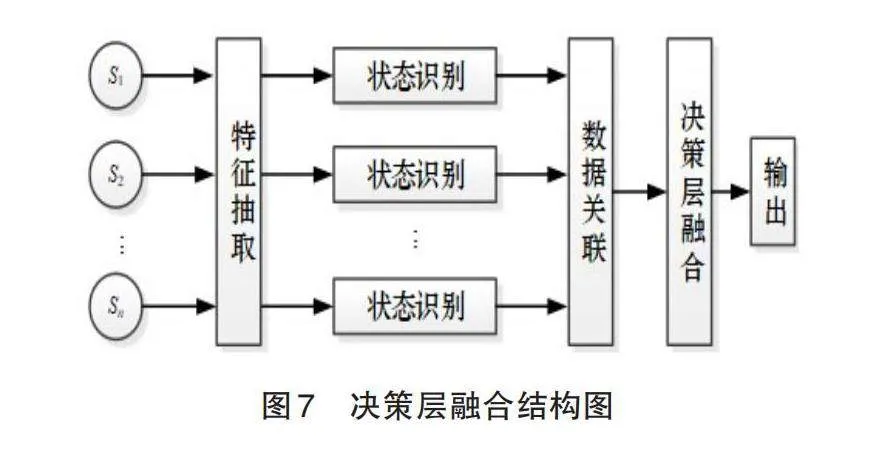
决策层融合是数据融合的最高层次,其优势在于具有较强的抗干扰能力,对传感器的依赖相对较小,且适用于多源异构传感器的数据,同时,处理过程成本也相对较低。其主要步骤包括:首先将多源异构传感器的数据经过预处理,随后通过预处理后的信息对被观测目标进行独立决策,接着将各独立的决策结果进行信息融合,最终得到决策结果,决策层的融合结果具有整体上的一致性。目前,决策层融合使用的方法主要包括:贝叶斯推理法、D-S证据理论法、模糊推理理论以及专家系统等方法[12]。决策层融合结构如图7所示。
3 面向典型任务的多源信息融合模型
岛礁立体防御任务是典型的多源异构信息融合实战化运用实例,面向该典型任务,分布式协同侦察系统通过使用侦察卫星、无人机(UAV)、巡飞弹、无人艇(USV)、无人潜航器(UUV)及重磁水声等多元探测系统对中小型岛礁海域进行监视及探测,实现海陆空天潜等多域协同探测[13-14]。
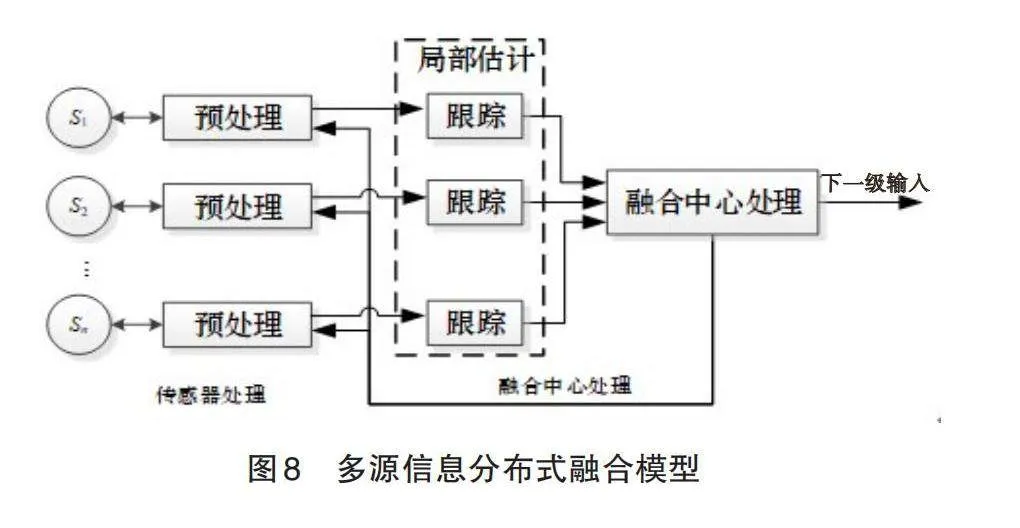
在岛礁立体防御分布式协同侦察系统处理信息时,考虑到作战快速响应、传输迅速和适应性强等需求,可采用分布式融合结构。分布式融合结构的核心思想是陆(礁)、海(潜)、空、天等作战域中无人侦察平台的异构传感器数据在被送入多源信息融合中心之前,可先通过其自身处理器对数据进行预处理,对典型目标的观测数据进行跟踪识别,然后将已处理的数据传送到融合中心,由融合中心完成数据关联和时空配准,完成对同构传感器数据的信息融合处理后,再进行跨平台异构传感器的数据关联和数据融合,以形成目标状态和属性全局估计,辅助指控中心做出全局判断。岛礁立体防御分布式协同侦察作战多源信息分布式融合结构如图8所示。
面向中小型岛礁典型立体防御作战任务,多无人作战平台以集群模式进行分布式侦察和协同打击,UAV群、巡飞弹群、USV群、UUV群携带光电设备、水声及其他探测载荷投放到以岛礁为中心的任务区域后,无人协同作战系统联合岛礁岸基与环岛感知探测设备对任务区域进行搜索和监视。其中岛礁岸基主要通过中远程两维相扫数字有源相控阵雷达探测,并配合环岛振动感应光纤网以及环岛高清摄像机探测网进行全天时全天候的探测感知;UAV群与巡飞弹群主要通过携带的机载合成孔径雷达(SAR)与机载光电(可见光、红外、激光)设备进行全天候的探测;USV群与UUV群主要通过高性能的主动声呐与电磁设备对侵入的蛙人等主要目标实施探测感知。
通过多种探测手段对目标区域进行感知,判断任务区域内是否存在敌对目标,不同平台之间的通信可通过天基地球同步轨道卫星互联网进行近实时通信,各群之间内部可通过自组网数据链实现低时延高带宽的实时通信。
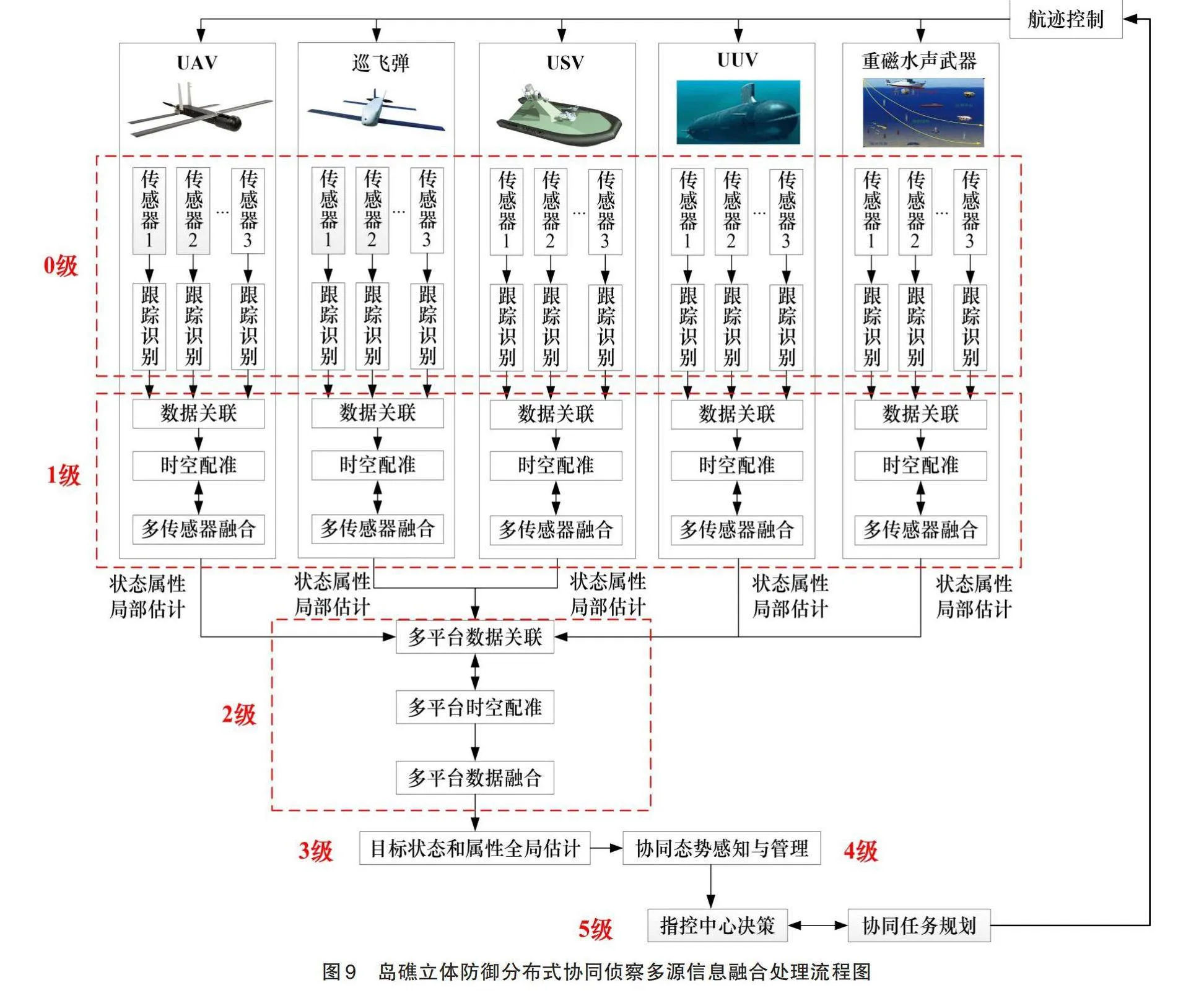
若确认在当前探测区域内存在敌对目标信息,则立即对目标进行跟踪,以获取实时信息并进行多级处理融合后将结果上报至指控中心。当指控中心确认后进行威胁评估和决策,制定作战方案,由无人协同作战系统组织驱离及打击。岛礁无人分布式协同侦察作战多源信息融合分级处理流程如图9所示。
4 仿真计算与分析
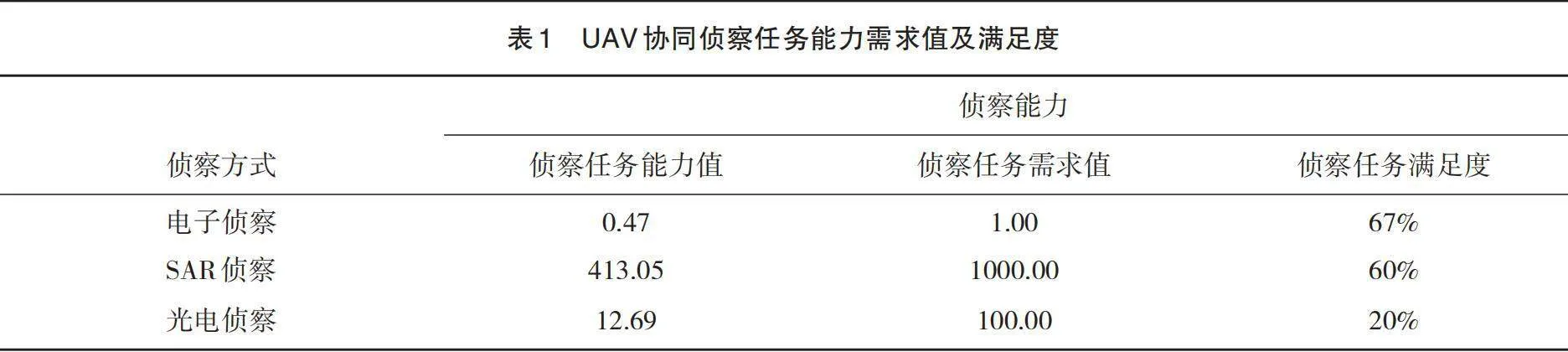
假设面向远海某岛礁执行侦察感知任务,此时由于岛礁地理位置较偏远,短期内无法对岛上布设岸基及环岛探测网,此次任务主要依靠UAV群携带不同侦察载荷前往目标区域执行侦察任务。根据文献[14]中对电子侦察、SAR侦察与光电侦察能力与效能的计算方法,假设侦察任务对电子侦察的需求值为1、对SAR侦察的需求值为1000、对光电侦察的需求值为100,通过建立能力满足度模型,得到侦察任务中电子侦察、SAR侦察及光电侦察能力任务满足度,见表1。
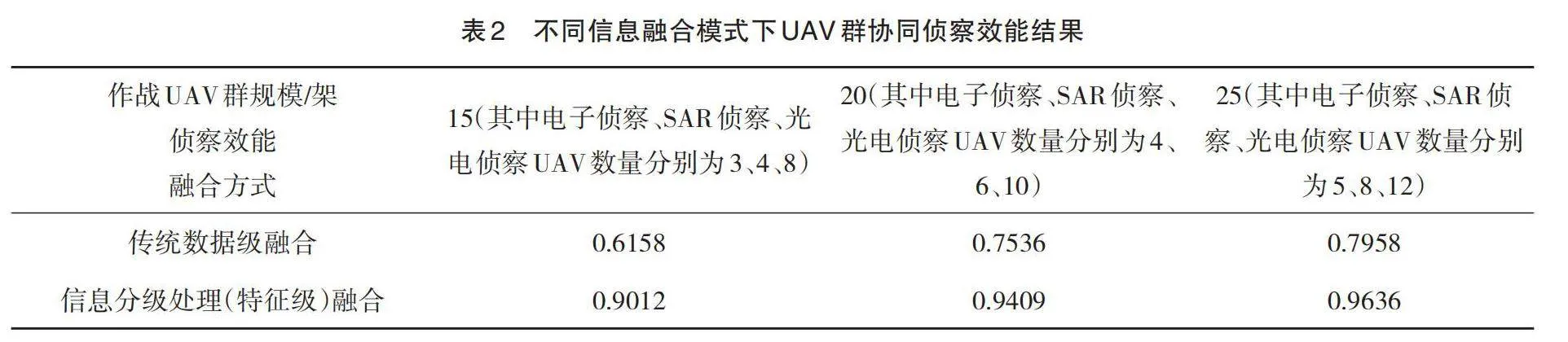
取电子侦察、SAR侦察及光电侦察三种不同侦察方式的效能权重值:β1=0.2,β2=0.3,,β3=0.5……,并假设三种侦察方式的信息传输能力均能满足协同侦察任务的信息传输需求值,分别计算无人机群规模在15(其中电子侦察、SAR侦察、光电侦察UAV数量分别为3、4、8)、20(其中电子侦察、SAR侦察、光电侦察UAV数量分别为4、6、10)、25(其中电子侦察、SAR侦察、光电侦察UAV数量分别为5、8、12)的情况下,传统数据级融合与信息分级处理(特征级)融合条件下的协同侦察效能,见表2。
通过上表仿真计算结果可知,横向来看,随着UAV群规模的不断增大,无论是传统数据级融合还是信息分级处理融合模式,协同侦察的效能都是在逐渐提升的,这是因为侦察数量的增加,使得探测感知到的目标信息数据量逐渐增多,对目标的识别更加准确;纵向来看,在UAV群规模和三种侦察方式的平台编配方案确定的情况下,信息分级处理融合模式相比于传统数据级的融合,对目标的协同侦察效能有较明显的提升,说明利用特征级多源信息融合实现信息分级处理的方式对于提升集群侦察效能具有明显的作用,所以可以利用特征级抑或是决策级的多源信息融合来实现信息分级处理,提升侦察感知的能力。
5 信息分级处理关键技术
5.1" 信息感知系统时空校准技术
多传感器信息融合系统由无人机、巡飞弹、无人艇、无人车、水下无人潜航器等携带的多个异构传感器组成,通过这些传感器得到的观测数据都是以自身平台系统为基准的,这就导致这些数据虽然异构多样但存在一定互补,使得观测数据时间和空间一致性难以保证,具体表现为数据率的不一致和测量维数的不匹配,在信息融合时,会产生一定的问题。所以在处理异构传感器的观测数据前,需要预先进行处理,将时间和空间变换至统一的参考基准当中,并对异构平台传感器的观测误差、位置误差以及坐标转换过程中的固有误差进行补偿和修正,这样得到的数据方可使用。
5.2" 目标识别多层级融合技术
对作战信息分级处理时,在数据层和决策层数据融合是多源信息融合的关键。对舰船、基地、防空阵地等典型目标进行识别时,目前常用的方法是通过对典型目标的多种特征参数的观测分析,将其和已有数据库中的目标特性参数进行匹配,通过匹配分析来确定典型目标的类别,进而进行典型目标的特征信息融合,这其中主要涉及特征提取技术和特征关联技术[15]。
5.3" 多传感器资源分配与管理技术
分布式协同作战中陆(礁)、海(潜)、空、天等不同物理作战域涉及门类多样的多个异构传感器,如何对这些传感器进行有效的管理,高效利用其采集到的数据就变得尤其重要。所以需要制定一些潜在的准则和协议,合理管理并适当分配这些传感器,涉及传感器管理的技术主要包括:传感器对目标的分配和优先级方法、传感器的性能预测、传感器空间和时间作用范围控制准则、传感器接口技术、传感器配置和控制策略等内容[14-15]。
6 结束语
本文在分析多源异构信息融合特点的基础上,设计基于多源信息融合的信息分级处理模型,详细设计信息融合功能模型、层次模型以及总体框架,给出多源信息处理的流程;面向岛礁立体防御分布式协同侦察任务,分析建立多源信息分布式融合模型架构,并对岛礁立体防御分布式协同侦察多源信息融合步骤进行分解,得到(0~5)级信息融合处理流程,针对典型协同侦察任务进行仿真计算分析,初步验证信息分级处理方法的可行性;分析提炼基于信息分级处理的多源信息融合过程中的主要关键技术,旨在引起对未来分布式作战领域多源信息融合建设的重视,为分布式协同侦察多源异构信息融合技术的发展提供一定参考。
参考文献:
[1]Joint Chiefs of Staff. Capstone Concept for Joint Operationoint Force 2020 [R]. September ,2012.
[2]高颖,姬维君,王凤华,等. 基于分层多级黑板的多源信息融合系统设计[J].弹箭与制导学报,2013,33(6):149-152.
[3]何友,王国宏,陆大金,等. 多传感器信息融合及应用[M]. 北京:电子工业出版社,2000.
[4]韩崇昭,朱洪艳,段战胜,等. 多传感器信息融合(2版)[M]. 北京: 清华大学出版社,2010.
[5]化柏林.多源信息融合方法研究[J]. 情报理论与实践,2013(11):16-19.
[6]曹建君,李景相,蔡喜琴,等.基于信息融合理论的省情信息融合研究[J]. 遥感技术与应用,2006(4):368-371.
[7]赵新路,李兵,胡爱虔,等.分布式作战智能化C2的能力提升发展分析[J].中国电子科学研究院学报,2021,16(11): 1119-1125.
[8]HU JIAQI. Data fusion: a first step in decision formatics [D].Troy: Rensselaer Polytechnic Institute, 2008.
[9]明兰. 基于数据融合的协作频谱检测算法的研究[D].南京:南京邮电大学,2012.
[10]MEGALOOIKONOMOU V, YESHA Y. Space efficient quantization for distributed estimation by a multi-sensor fusion system [J]. Information Fusion. 2004, 5(5) : 299-308.
[11]万洪容,陈怀新. 基于多源信息融合的海上目标判证系统[J]. 电讯技术, 2007, 47(3): 131-135.
[12]赵宗贵,刁联旺,李君灵,等. 信息融合工程实践—技术与方法[M].北京:国防工业出版社,2015.
[13]赵新路,李兵,陈华,等. 岛礁无人作战体系面临的挑战及关键技术分析[J]. 无人系统技术, 2021, 4(2):56-61.
[14]赵新路,陈雪.基于效用函数的无人机群分布式协同侦察方法研究[J].中国电子科学研究院学报,2022,17(6):577-581.
[15]李会民,马桂英. 异构多源信息融合方法概述[J]. 嘉应学院学报(自然科学), 2016, 2(34): 21-26.
责任编校:孙咏梅,刘 燕
Research on Distributed Multi Source Reconnaissance Method Based on Information Grading Processing
CHEN Xue1,CHEN Julan1,ZHAO Xinlu2
(1.Chengdu Aeronautic Polytechnic, Chengdu 610100, China;
2.Research Institute of Sichuan Aerospace System Engineering, Chengdu 610100, China)
Abstract:Aiming at the uncertainty of complex environment and single sensor information, the situation awareness of complex battlefield can be solved by using manned/unmanned multi-sensor distributed cooperative reconnaissance and information fusion. By analyzing the characteristics of multi-source heterogeneous sensor information fusion, the hierarchical information processing model is applied to distributed multi-source reconnaissance tasks. The overall framework, functional model and hierarchical model of information fusion are designed, the process steps of multi-source information processing are condensed, and the hierarchical information processing process is designed for typical distributed cooperative reconnaissance tasks of islands and reefs and simulated. The key technologies of multi-source information fusion information classification processing are condensed, aiming at promoting the rapid development of information fusion technology and providing some reference for the development and construction of China's weapons and equipment system.
Key words:information classification; distributed; multi-source information fusion; collaborative reconnaissance; processing model
猜你喜欢
湖南电力(2022年3期)2022-07-07 08:56:58
能源(2018年5期)2018-06-15 08:55:58
能源(2017年7期)2018-01-19 05:05:03
能源(2017年10期)2017-12-20 05:54:07
制导与引信(2017年3期)2017-11-02 05:16:56
能源(2017年5期)2017-07-06 09:25:54
通信电源技术(2016年6期)2016-04-20 06:21:26
通信电源技术(2016年5期)2016-03-22 01:09:42
雷达与对抗(2015年3期)2015-12-09 02:38:50
自动化博览(2014年12期)2014-02-28 22:34:27
