
核电站含脊柱关节驱动四足机器人跳跃步态控制方法
2024-12-16 00:00:00刘胜峰杨学成车熠孙志永王子俊
中国新技术新产品 2024年22期



摘 要:传统的四足机器人跳跃步态控制阶段一般为单向形式,其控制效率低,导致最终移位差增大,因此本文设计核电站含脊柱关节驱动四足机器人跳跃步态控制方法。根据当前控制需求建立控制坐标系,采用多阶方式提升控制效率,设计多阶段机器人跳跃步态控制,构建脊柱关节驱动四足机器人跳跃步态控制模型,采用步态次序平衡调整的方式来进行控制。测试结果表明,在单腾空态跳跃、双腾空态跳跃2种状态下,与交叉耦合四足机器人步态控制方法、Trot四足机器人行走姿态控制策略相比,本文设计的方法最终得到的移位差比较小,说明该方法针对性较强,控制效果更好,应用价值更高。
关键词:核电站;自主巡检;四足机器人;无人机;定位;巡航
中图分类号:TP 242 " " " 文献标志码:A
核电站的作业环境比较复杂,使用传统的自动化与远程操控手段通常会面对许多挑战,例如辐射区域的风险性高、狭窄空间内的灵活作业需求以及在紧急情况下快速响应的迫切性等。为解决上述难题,本文制造了含脊柱关节驱动的四足机器人。模拟生物四肢与脊柱的协同运动机制,在平坦或崎岖不平的地形中灵活穿梭,甚至完成跳跃等高级动态行为,极大程度地提高机器人的灵活性和动态平衡能力。但是当环境切换时,机器人的步态控制存在一定的问题,例如无法精准着陆固定区域、接近目标但是出现移位以及耗时较长等。为解决这些问题,研究人员设计了控制方法,例如交叉耦合四足机器人步态控制方法利用足间动力学耦合效应,调整步伐节奏与着地位置,精确计算并协调各足间的运动相位与力度,使步态转换平稳、流畅,提升能量利用效率[1]。Trot四足机器人行走姿态控制策略利用四足机器人侧摆肩关节的电机对步态进行精细调整,模拟自然界中动物的奔跑姿态,优化关节角度与运动轨迹,降低能耗,提升行走效率[2]。这类方法可以达到预期的控制目标,但是可控性较差,时间消耗较多,在复杂环境中不能迅速撤离目标区域。因此本文设计核电站含脊柱关节驱动四足机器人跳跃步态控制方法。分析脊柱关节与四肢的协调运动规律,结合控制算法与传感器技术使机器人在复杂地形中能够稳定跳跃与精准定位,扩大控制范围,提高控制效果,步态控制更灵活、多变,为核电站自动化与智能化发展贡献力量。
1 建立含脊柱关节驱动四足机器人跳跃步态控制方法
1.1 建立控制坐标系
建立控制坐标系是四足机器人进行平衡控制的关键,可以有效规划并控制脊柱关节以及四肢的协调运动。控制坐标系以全局坐标为主[3],将机器人身体的中心点或某一个固定点作为核心点,根据该点位定义各关节的局部坐标。控制坐标系结构如图1所示。设计该结构并在实践中进行分析,然后标定核心点位,在这个过程中利用角度或位移参数来描述其驱动方式,并根据建立的坐标系计算机器人步态的初始控制范围[4],如公式(1)所示。
P=γ2-(m+n) " " " " " "(1)
式中:P为初始控制范围;γ为自适应覆盖区域;m为移动的角度;n为位移参数。将计算得到的初始控制范围设定为坐标的控制约束范围标准。结合机器人跳跃步态中的动力学特性和运动轨迹标定其受力点,在不同的工况条件下采集实时数据和信息,待后续使用[5]。设计的坐标系并不是固定的,一般针对四足机器人的应用需求进行设定以及移动,保证后续步态控制的灵活度和稳定性[6]。
1.2 机器人跳跃步态控制多阶段设计
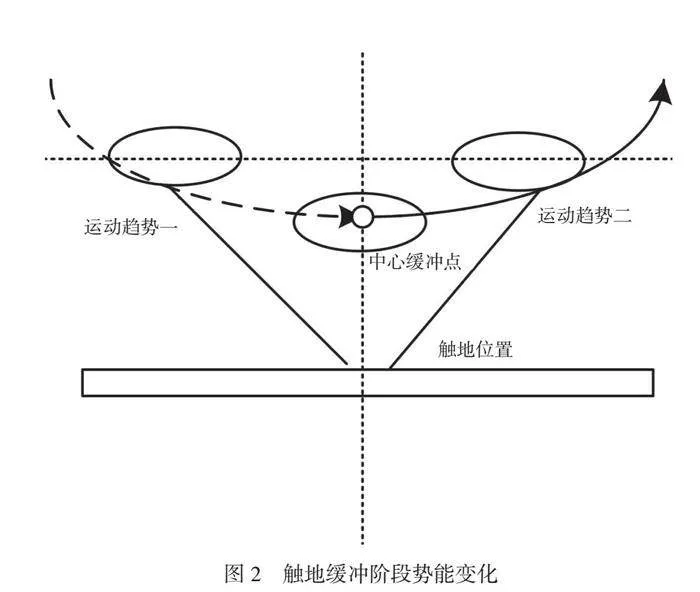
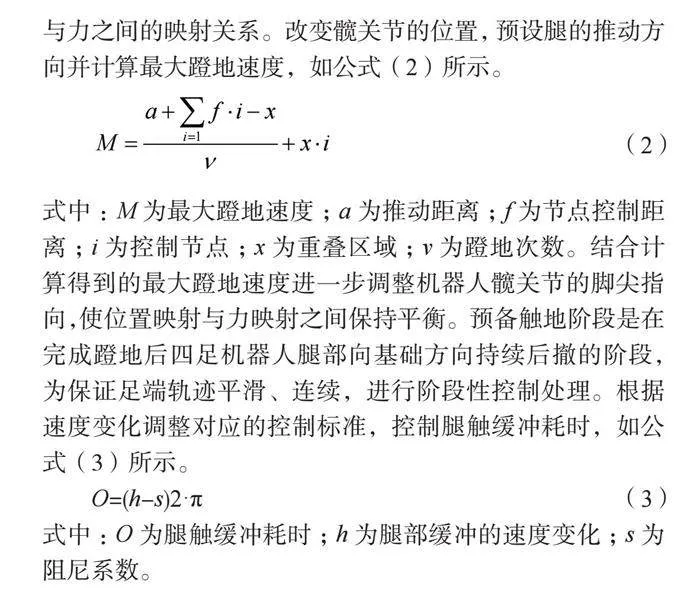
上文设计的坐标系针对机器人的跳跃动作和受力、着力点方向,根据巡航需求设计机器人跳跃步态控制阶段[7],其分为触地缓冲阶段、蹬地阶段和预备触地阶段。触地缓冲阶段四足机器人自身的重力会出现不同的变化,身体的势能会转换为腿部的势能[8]。如果整体的重心降低,那么对应的运动速度也会降低。触地缓冲阶段势能变化如图2所示。在这个阶段,需要采用竖直弹簧机器人来缓冲足端与躯干之间的作用力,在势能转换的过程中保持平衡。四足机器人腿部并不是伸缩式的,因此这部分利用半无限线性规划(Semi-Infinite Linear Programming,SILP)技术进行辅助,建立位置与力之间的映射关系。改变髋关节的位置,预设腿的推动方向并计算最大蹬地速度,如公式(2)所示。
(2)
式中:M为最大蹬地速度;a为推动距离;f为节点控制距离;i为控制节点;x为重叠区域;v为蹬地次数。结合计算得到的最大蹬地速度进一步调整机器人髋关节的脚尖指向,使位置映射与力映射之间保持平衡。预备触地阶段是在完成蹬地后四足机器人腿部向基础方向持续后撤的阶段,为保证足端轨迹平滑、连续,进行阶段性控制处理。根据速度变化调整对应的控制标准,控制腿触缓冲耗时,如公式(3)所示。
O=(h-s)2·π " " " " " "(3)
式中:O为腿触缓冲耗时;h为腿部缓冲的速度变化;s为阻尼系数。
根据计算得到的腿触缓冲耗时对机器人的运行轨迹进行基础性规划处理,形成完整、细化的控制标准。
1.3 构建脊柱关节驱动四足机器人跳跃步态控制模型
针对上文设计的各个基础控制阶段,根据实际的步态控制要求设计脊柱关节驱动四足机器人跳跃步态控制模型。了解当前四足机器人各关节的运动学关系和动力学特性,分析脊柱关节的力矩与角加速度的关系,如公式(4)所示。
Jspine=Ispineθ+sθ2 " " " " (4)
式中:Jspine为脊柱关节的驱动力矩;Ispine为脊柱的转动惯量;θ为脊柱关节的角加速度。根据上述计算调整四足机器人的运行状态,在保持平衡后,基于驱动条件的变化设计模型结构,如图3所示。
设计驱动四足机器人跳跃步态控制模型结构并进行分析。根据上述模拟,分别调整脊柱弯曲角度和四肢推力组合测试,使步态跳跃效果达到最佳,模型的步态控制最优解计过程如公式(5)所示。
E=ι-∫BX+Q " " " " (5)
式中:E为步态控制最优解;ι为步态控制范围;B为跳跃次数;X为四肢推力强度;Q为外部推力。分析得到的结果,实时调整脊柱关节和四肢的控制参数,保证机器人在复杂多变的核电站环境中能够稳定、可靠地执行跳跃步态。
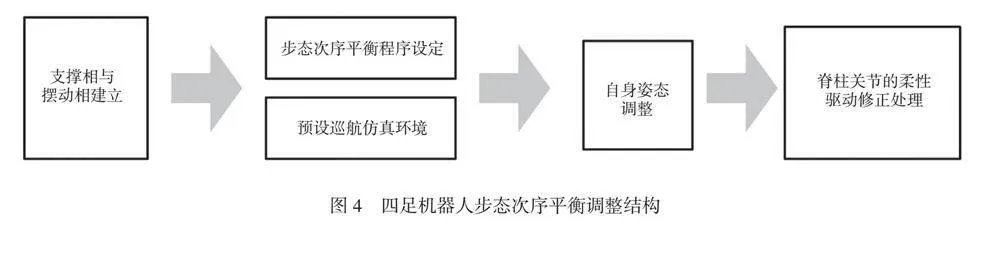
1.4 步态次序平衡调整控制处理
步态控制的关键是使各足部按照预定次序协调运动,保证在跳跃过程中力量分配合理、动作连贯。四足机器人步态划分为支撑相与摆动相,两者交替进行以维持动态平衡。四足机器人步态次序平衡调整结构如图4所示。结合测试设备比较力反馈与姿态控制,可以预设多个巡航仿真测试环境,机器人利用内置的传感器实时监测自身姿态,并按照指令执行动作与跳跃步态,快速响应,使重心保持稳定。机器人步态次序平衡处理须结合脊柱关节的柔性驱动进行调整,这样可以灵活地适应地面变化,提高跳跃过程中的稳定性。
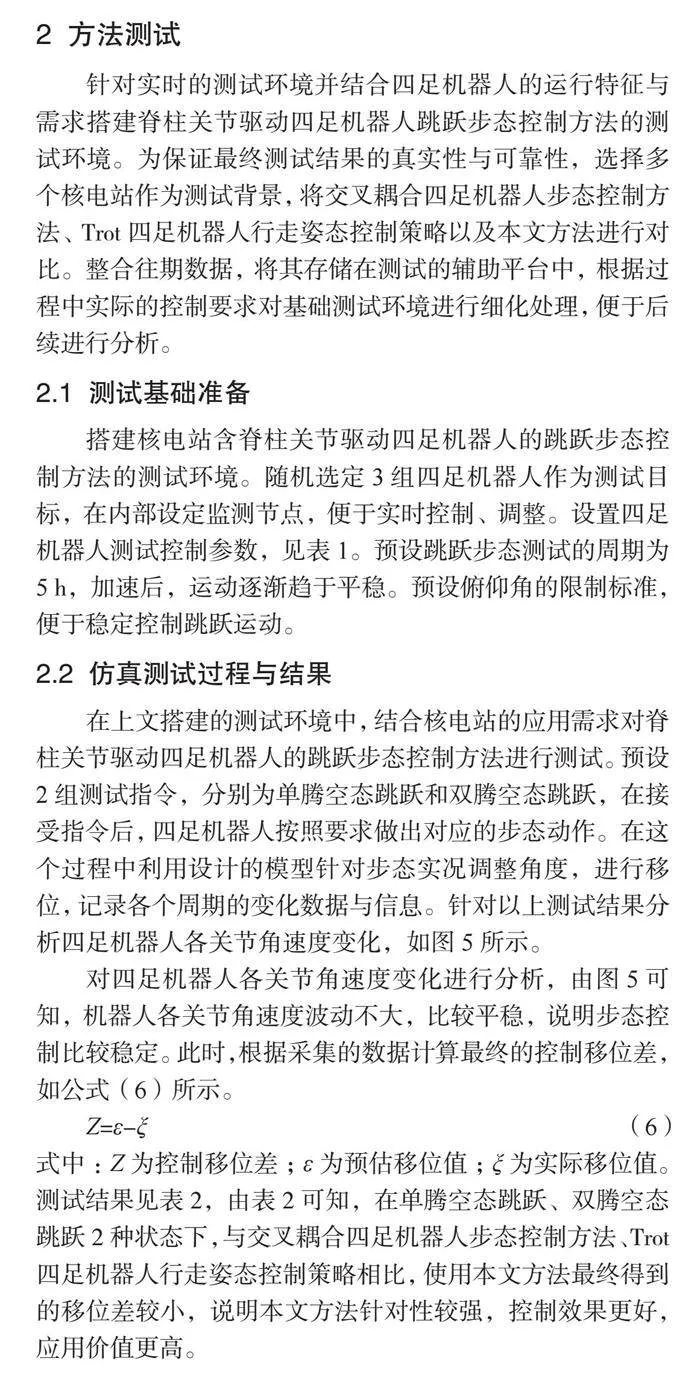
2 方法测试
针对实时的测试环境并结合四足机器人的运行特征与需求搭建脊柱关节驱动四足机器人跳跃步态控制方法的测试环境。为保证最终测试结果的真实性与可靠性,选择多个核电站作为测试背景,将交叉耦合四足机器人步态控制方法、Trot四足机器人行走姿态控制策略以及本文方法进行对比。整合往期数据,将其存储在测试的辅助平台中,根据过程中实际的控制要求对基础测试环境进行细化处理,便于后续进行分析。
2.1 测试基础准备
搭建核电站含脊柱关节驱动四足机器人的跳跃步态控制方法的测试环境。随机选定3组四足机器人作为测试目标,在内部设定监测节点,便于实时控制、调整。设置四足机器人测试控制参数,见表1。预设跳跃步态测试的周期为5 h,加速后,运动逐渐趋于平稳。预设俯仰角的限制标准,便于稳定控制跳跃运动。
2.2 仿真测试过程与结果
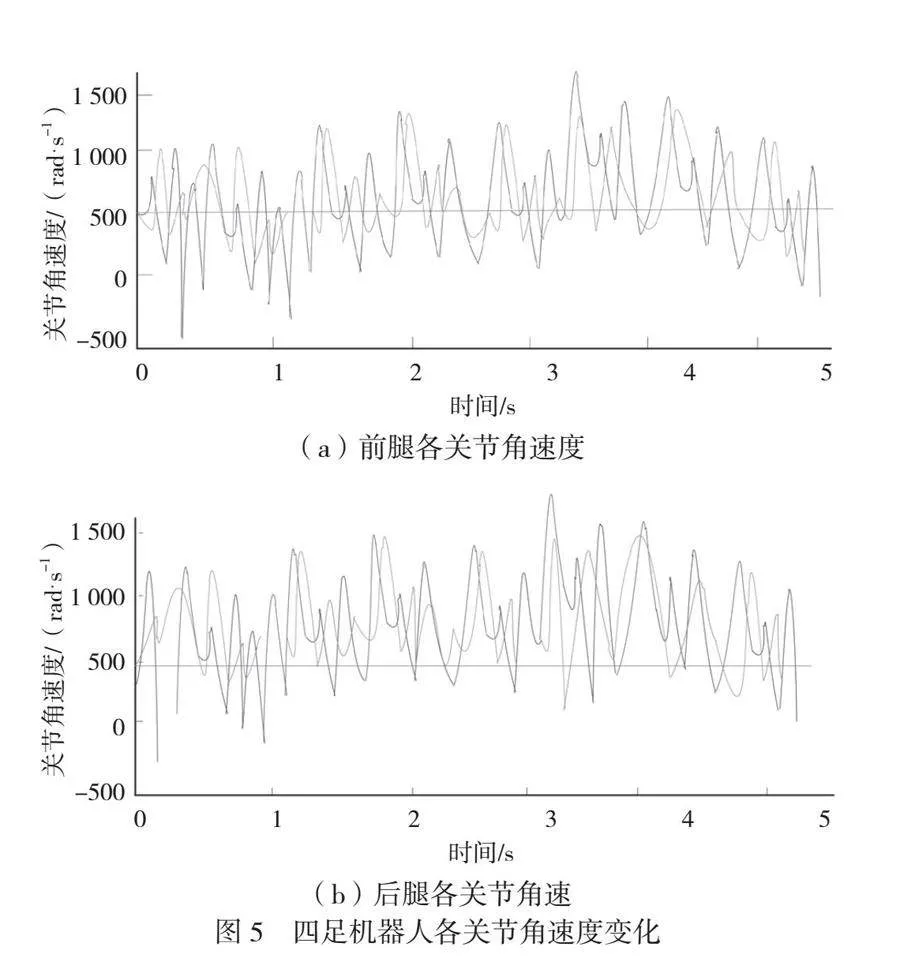
在上文搭建的测试环境中,结合核电站的应用需求对脊柱关节驱动四足机器人的跳跃步态控制方法进行测试。预设2组测试指令,分别为单腾空态跳跃和双腾空态跳跃,在接受指令后,四足机器人按照要求做出对应的步态动作。在这个过程中利用设计的模型针对步态实况调整角度,进行移位,记录各个周期的变化数据与信息。针对以上测试结果分析四足机器人各关节角速度变化,如图5所示。
对四足机器人各关节角速度变化进行分析,由图5可知,机器人各关节角速度波动不大,比较平稳,说明步态控制比较稳定。此时,根据采集的数据计算最终的控制移位差,如公式(6)所示。
Z=ε-ξ " " " " " "(6)
式中:Z为控制移位差;ε为预估移位值;ξ为实际移位值。测试结果见表2,由表2可知,在单腾空态跳跃、双腾空态跳跃2种状态下,与交叉耦合四足机器人步态控制方法、Trot四足机器人行走姿态控制策略相比,使用本文方法最终得到的移位差较小,说明本文方法针对性较强,控制效果更好,应用价值更高。
3 结语
本文对核电站含脊柱关节驱动四足机器人的跳跃步态控制方法进行研究。在真实的测试环境中,与传统四足机器人控制技术相比,本文设计的步态控制方法在特殊作业环境中的整体适应性明显提升。优化脊柱关节与四肢的协同控制机制,结合智能感知与决策处理技术,不断提高机器人在复杂地形中的跳跃稳定性与效率,提升机器人自主导航、环境感知与任务执行能力,保障核电站安全运行。
参考文献
[1]罗继曼,马思源,肖雅心,等.基于交叉耦合的四足机器人Trot步态控制研究[J].沈阳建筑大学学报(自然科学版),2024,40(3):554-562.
[2]王银浩,颉潭成,徐彦伟,等.四足机器人侧摆型trot步态的运动学分析及仿真研究[J].现代制造工程,2022(5):24-29.
[3]杨宏强.ESP32的四足机器人步态规划与运动学分析[J].中国高新科技,2023(24):58-59.
[3]金泽凡,于宪元,李习辉,等.使用质心规划的四足机器人爬行步态优化控制方法[J].制造业自动化,2024,46(5):8-17.
[5]崔嘉伟.基于仿生运动理论的四足机器人步态控制模型建立[J].信息记录材料,2023,24(3):170-172,176.
[6]周志华,周枫林,聂宇峰,等.四足机器人CPG步态规划与坡面运动控制研究[J].智能计算机与应用,2022,12(9):65-71,75.
[7]王银浩,颉潭成,徐彦伟,等.四足机器人侧摆型trot步态的运动学分析及仿真研究[J].现代制造工程,2022(5):24-29.
[8]白柳,罗金良,胡鹏飞,等.虚拟模型控制被动柔性脊柱四足机器人研究[J].机电工程技术,2022,51(3):202-206.
猜你喜欢
飞碟探索(2022年2期)2022-05-31 01:28:03
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
中国核电(2017年2期)2017-08-11 08:01:12
能源(2016年3期)2016-12-01 05:11:05
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
