
基于单目视觉的集成电路芯片引脚共面性检测
2024-12-08 00:00:00霍风祥
中国新技术新产品 2024年9期
关键词:集成电路


摘 要:芯片引脚共面性检测是集成电路生产过程中的重要环节,关系到集成电路芯片性能的发挥,但是现行方法检测结果置信水平、检出率比较低。因此本文提出基于单目视觉的集成电路芯片引脚共面性检测方法研究,利用相机搭配光源对芯片进行拍摄测量,采用彩色系统变化法对原始芯片图像进行灰度转化,并通过阈值分割对芯片图像提取检测目标,利用单目视觉对芯片图像进行拟合分析,确定芯片引脚共面度,完成基于单目视觉的集成电路芯片引脚共面性检测。经试验证明,本文方法检测结果置信水平和检出率均在95%以上,拟合精度误差能够控制在0.135mm以下,拟合稳定性能为97.50%,能够精准检测集成电路芯片引脚共面性。
关键词:单目视觉;集成电路;芯片引脚;共面性;彩色系统变化法;阈值分割
中图分类号:TP 391 " " 文献标志码:A
随着科技的快速发展,集成电路芯片在各领域的应用越来越广泛,如通信、计算机和汽车电子等。集成电路芯片引脚共面性指的是芯片引脚在水平面上的平整度和一致性。在理想情况下,所有引脚都应处于同一平面上,以保证芯片能够与主板或其他电路正确连接。但在制造和组装过程中,由于各种因素的影响,引脚可能会出现不同程度的偏差,导致共面性不良,进而影响整个系统的正常运行。为了检测集成电路芯片引脚的共面性,通常会采用接触式测量或非接触式测量的方法。其中,接触式测量方法精度高,但测量速度慢且容易对芯片造成损伤;非接触式测量方法速度快,但受环境因素影响较大且对设备的要求较高。这2种方法均存在不足和缺陷,在实际应用中检测结果置信水平和检出率均较低,难以达到预期检测效果。因此,本文提出基于单目视觉的集成电路芯片引脚共面性检测方法。
1 集成电路芯片图像测量
单目视觉是一个集图像数据采集、处理和三维重建并分析的计算机技术,本文采用该技术对芯片引脚共面性进行检测,需要利用单目相机采集到芯片图像。结合芯片引脚共面性检测需求,采用美国YFA公司IFGHASTG-A4FGA8相机,根据芯片尺寸确定相机成像视场[1]。考虑基于单目视觉的检测对图像清晰度要求较高,在相机上方布设一个光源,根据现场实际情况确定相机与光源的间距,将集成电路芯片放置于光源与相机的焦点位置,保证集成电路芯片照明均匀一致。由于集成电路芯片引脚与其他部位的高度不一致,使其对应的光源入射角不同,因此,在拍摄的图像中,各像素点用相应的灰度值表示。将拍摄的芯片图像上传到计算机,用于后续处理和分析。
2 芯片图像灰度化和阈值分割
为了保证后续单目视觉系统对芯片引脚共面性的检测精度,对采集的芯片图像进行预处理。由于原始芯片图像为彩色图像,与灰度图像相比,彩色图像纹理特征与轮廓特征不够明显,因此采用彩色系统变化法对原始芯片图像进行灰度转化,如公式(1)所示。
F=α·R+β·G+γ·B (1)
式中:F表示灰度转化芯片图像像素点对应的灰度值;α、β、γ分别表示图像红色分量、绿色分量和蓝色分量的变换系数;R、G、B分别表示芯片图像像素点的红、绿、蓝3个彩色分量值[2]。利用公式(1)将图像中所有像素点灰度化,生成灰度图像。图像由背景与前景2部分组成,芯片引脚共面性检测对象为图像前景。通常情况下,图像的前景灰度值高于图像的背景,因此采用阈值分割法对集成电路芯片灰度图像进行分割,提取到目标区域,如公式(2)所示。
(2)
式中:S表示集成电路芯片灰度图像阈值分割结果;1表示图像背景;F表示图像前景;表示阈值。
将识别到的图像背景灰度值设置为“0”,以此将图像的背景消除,仅保留图像的前景,用于后续芯片引脚共面性拟合检测。
3 基于单目视觉的芯片引脚共面性拟合检测
3.1 芯片引脚共面性拟合检测
在上述基础上,利用单目视觉技术对图像进行拟合分析,检测出图像芯片引脚到平面的距离,估测芯片引脚拟合度[3]。在单目视觉中,光源发射的光线照射在集成电路芯片表面区域,经过芯片表面反射光线进入单目相机,成像到图像中对应的像素点上,生成集成电路芯片图像[4]。由于光源发出的光线在传输过程中受集成电路芯片表面引脚产生的倾角和芯片材料属性的影响,光线的光强会发生变化,本文在不考虑芯片材料属性的影响情况下,假设芯片表面引脚产生的倾角对光强影响系数为ε,光线经过具有一定倾角的点反射,产生散射光与镜面反射光[5]。根据光学原理,光线反射光与入射光线关于法线呈对称关系,但是在现实中,芯片上某一点反射的光线会聚集在一起,最终沿光路进入单目相机中,则图像像素灰度值与光强的关系可以用公式(3)表示。
F=I·ε·cosϑ·cosη (3)
式中:I表示光强;ϑ表示光线经过芯片表面产生的倾角;η表示反射光线夹角[5]。
在单目视觉中,光线与平面的夹角为ρ,其与光线经过芯片表面的倾角和反射光线夹角存在如公式(4)所示的关系。
(4)
式中:zw表示光线经过的点到平面的距离;xw、yw分别表示光线经过的点在单目相机图像坐标系中水平方向位置和垂直方向位置[6]。
图像像素点灰度值已知,光线强度可以通过标定确定,引脚在图像坐标系中的位置可以通过坐标系转换关系确定。将已知参数值代入公式(3)、公式(4)中,即可求出引脚到平面的距离[7]。将所有引脚到平面的距离标定到图像坐标系中,拟合芯片引脚三维模型,根据引脚到平面的最大距离和最小距离计算出芯片引脚共面度,如公式(5)所示。
(5)
式中:μ表示芯片引脚共面度;minzw、maxzw分别为引脚到芯片的最小距离和最大距离[8]。
根据实际情况设定一个阈值,如果共面度小于阈值,则芯片引脚共面性较差,不合格;如果共面度大于阈值,则芯片引脚共面性良好,合格。以此进行基于单目视觉的集成电路芯片引脚共面性检测。
3.2 引脚拟合精度分析
在引脚拟合过程中,精度是衡量算法性能的重要指标。为深入理解引脚拟合精度的数学模型,需要明确精度在引脚拟合中的重要性。精度的高低直接影响最终的检测结果,因此提高拟合精度至关重要。
引脚拟合精度的数学模型主要通过计算实际引脚点和拟合引脚点间的距离来评估。具体数学公式如下:
(6)
式中:E表示拟合误差,是衡量算法拟合精度的主要指标,E值越小,说明拟合精度越高;N表示引脚数量;Pi表示实际引脚点的坐标;Mi表示拟合引脚点的坐标;Pi-Mi表示实际引脚点和拟合引脚点间的差值。
公式(6)通过计算实际引脚点和拟合引脚点间的欧氏距离来评估拟合精度。
3.3 引脚拟合稳定性分析
在引脚拟合过程中,稳定性也是衡量算法性能的重要指标。稳定性分析的目的是探究不同因素对拟合结果稳定性的影响,从而更好地理解算法性能并寻找优化方法。
引脚拟合稳定性的数学模型基于欧氏距离的平均值来评估拟合结果的稳定性。具体如公式(7)所示。
(7)
式中:S表示拟合稳定性;|Pi-Mi|表示实际引脚点和拟合引脚点间的欧氏距离,用于衡量拟合误差。
评估拟合误差时,作为一种有效的指标,欧氏距离具有以下2个优点。1)能够捕捉到实际引脚点和拟合引脚点间的真实距离,而不仅是误差的大小。2)欧氏距离的平均值能够反映整体拟合的误差情况,通过减少平均值,可以提升整体的拟合效果和稳定性。
4 试验论证
4.1 试验准备与设计
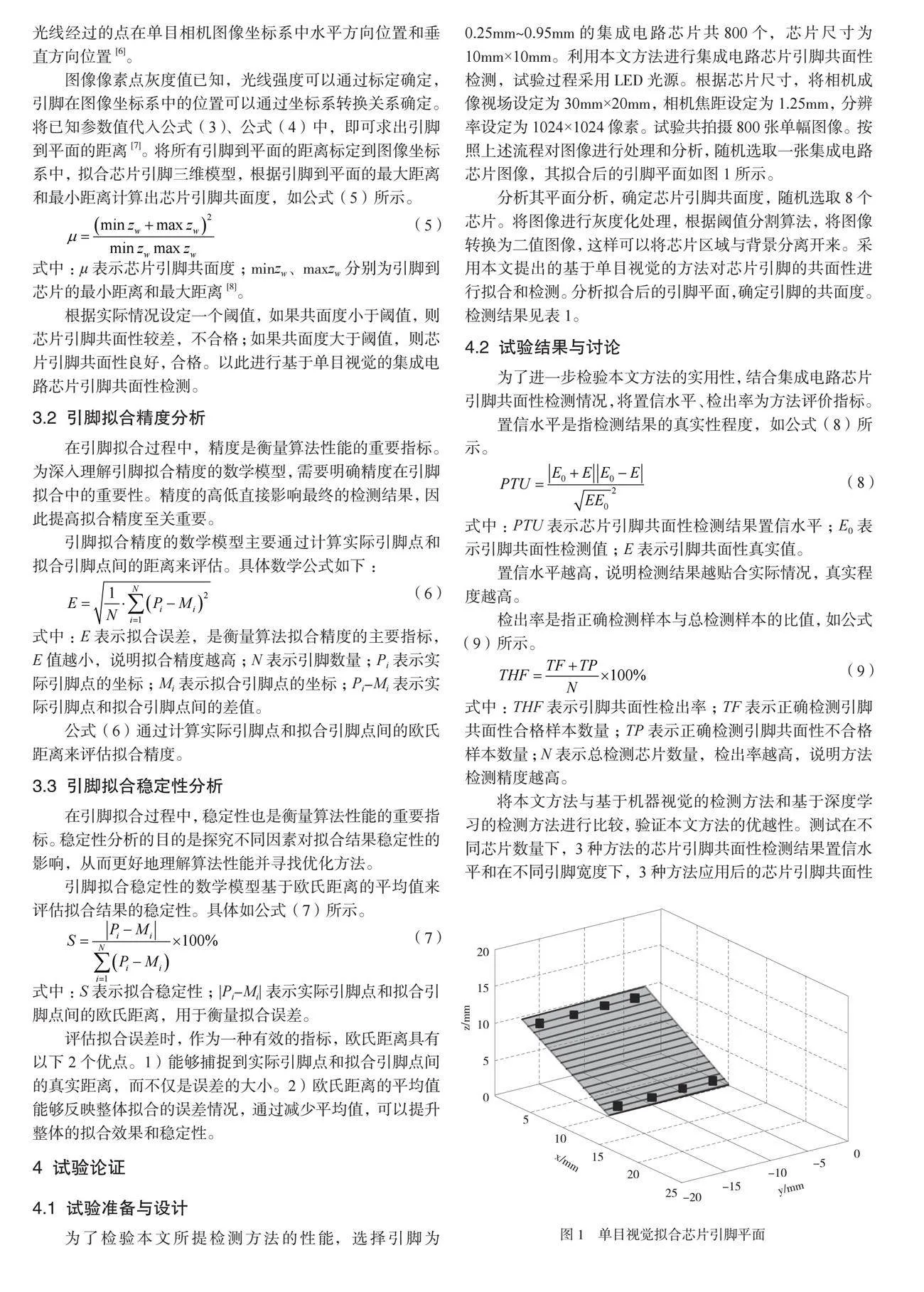
为了检验本文所提检测方法的性能,选择引脚为0.25mm~0.95mm的集成电路芯片共800个,芯片尺寸为10mm×10mm。利用本文方法进行集成电路芯片引脚共面性检测,试验过程采用LED光源。根据芯片尺寸,将相机成像视场设定为30mm×20mm,相机焦距设定为1.25mm,分辨率设定为1024×1024像素。试验共拍摄800张单幅图像。按照上述流程对图像进行处理和分析,随机选取一张集成电路芯片图像,其拟合后的引脚平面如图1所示。
分析其平面分析,确定芯片引脚共面度,随机选取8个芯片。将图像进行灰度化处理,根据阈值分割算法,将图像转换为二值图像,这样可以将芯片区域与背景分离开来。采用本文提出的基于单目视觉的方法对芯片引脚的共面性进行拟合和检测。分析拟合后的引脚平面,确定引脚的共面度。检测结果见表1。
4.2 试验结果与讨论
为了进一步检验本文方法的实用性,结合集成电路芯片引脚共面性检测情况,将置信水平、检出率为方法评价指标。
置信水平是指检测结果的真实性程度,如公式(8)所示。
(8)
式中:PTU表示芯片引脚共面性检测结果置信水平;E0表示引脚共面性检测值;E表示引脚共面性真实值。
置信水平越高,说明检测结果越贴合实际情况,真实程度越高。
检出率是指正确检测样本与总检测样本的比值,如公式(9)所示。
(9)
式中:THF表示引脚共面性检出率;TF表示正确检测引脚共面性合格样本数量;TP表示正确检测引脚共面性不合格样本数量;N表示总检测芯片数量,检出率越高,说明方法检测精度越高。
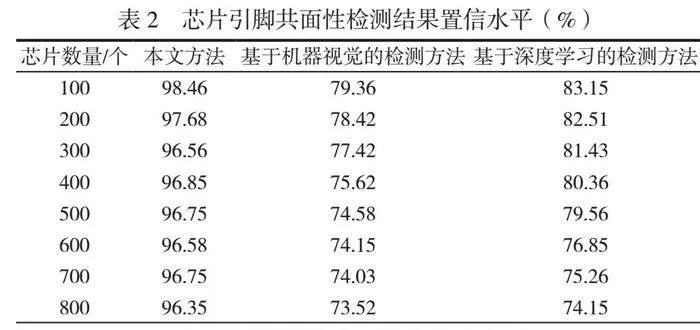
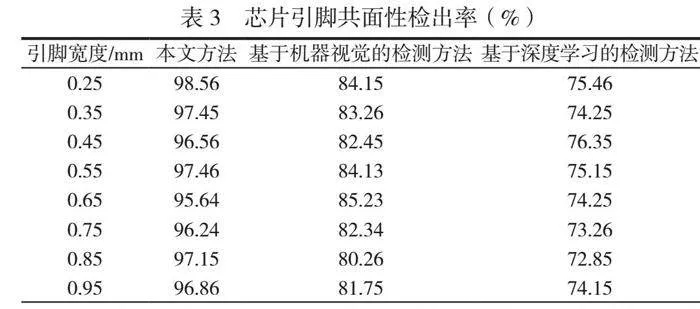
将本文方法与基于机器视觉的检测方法和基于深度学习的检测方法进行比较,验证本文方法的优越性。测试在不同芯片数量下,3种方法的芯片引脚共面性检测结果置信水平和在不同引脚宽度下,3种方法应用后的芯片引脚共面性检出率。具体试验结果见表2、表3。
通过对检测方法进行置信水平检验,本文方法置信水平最高可达98.46%,平均置信水平为97.15%,比基于机器视觉的检测方法提高了近23%,比基于深度学习的检测方法提高了近16%,检测结果的真实度得到了有效提升。通过对检测方法进行检出率检验,无论是哪种规格的集成电路芯片引脚,其检出率均超过95%,比基于机器视觉的检测方法提高了近15%,比基于深度学习的检测方法提高了近22%。
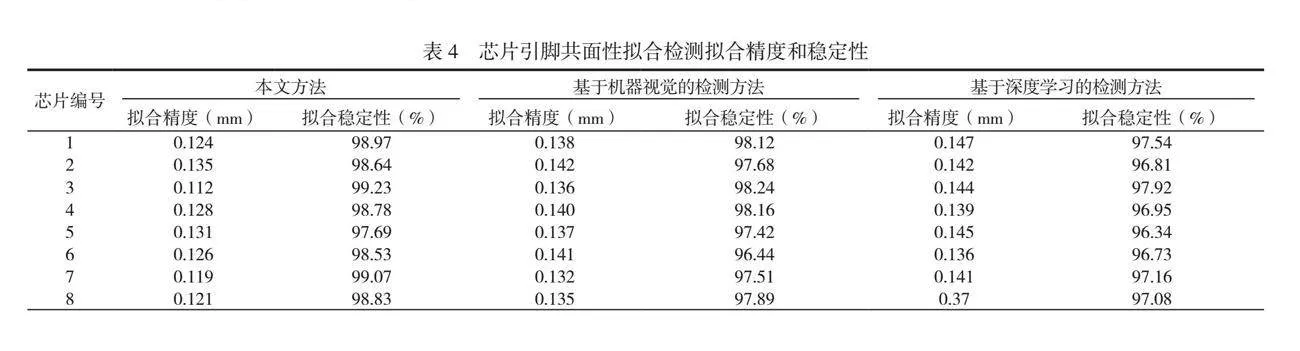
为了验证本文方法芯片引脚共面性拟合检测的拟合精度和拟合稳定性,随机抽取8个芯片,根据公式(6)、公式(7)计算其相应指标,结果见表4。
根据表4可知,本文方法的拟合精度和稳定性均优于基于机器视觉和深度学习的方法。在拟合精度方面,本文方法在多数芯片上表现出较高精度,在拟合稳定性方面也更稳定,具有较高的应用价值。说明在实际应用中,本文方法在拟合精度和稳定性方面更具优势。通过上述检测方法置信水平和检出率检验分析,所得试验结论为本文方法在集成电路芯片引脚共面性方面具有良好的实用性何较高的检测精度,比现行方法更具优势。
5 结语
本文基于单目视觉技术,对集成电路芯片引脚共面性检测方法进行了深入研究。试验结果表明,该方法具有较高的准确性和鲁棒性,能够满足实际生产需求。但本文的研究仍存在一些不足。例如,复杂背景下的引脚共面性检测仍需要进一步研究。同时,对于不同类型、不同尺寸的集成电路芯片,可能需要调整算法参数或改进算法结构以适应不同的应用场景。未来研究方向如下:对于复杂背景下的引脚共面性检测,可以尝试引入深度学习技术,通过训练大量数据模型提高算法的鲁棒性和适应性;对于不同类型、不同尺寸的集成电路芯片,可以研究一种通用的引脚共面性检测方法,以适应更广泛的应用场景;在实际应用中,可以考虑将单目视觉技术与双目视觉、多目视觉等技术相结合,以提高检测精度和效率。
参考文献
[1]张瑶桐.基于改进LSSVM的集成电路运行故障检测方法研究[J].机电信息,2023(22):11-13,20.
[2]第五俊峰,孙芳婷,曹潘.基于CMOS数字集成电路的定日镜推杆电缆组件检测方法[J].电线电缆,2023(5):59-62.
[3]曹泽强,陈文宇,洪琼,等.一种基于RobomasterEP的单目视觉水准视距测量方法[J].测绘地理信息,2023(5):17-21.
[4]安奕同,周平,闫英.基于单目视觉三维恢复算法的微观形貌原位测量方法研究[J].机械工程师,2022(12):9-13,16.
[5]孙有恒,薛志刚,王传宝,等.基于视频图像分析及单目视觉技术的地铁施工人员定位技术研究[J].电子设计工程,2023,31(15):187-190,195.
[6]张兆威,侯宇,蒋林,等.基于单目视觉和轮式编码器的室内移动机器人松耦合定位方法[J].武汉科技大学学报,2023,46(4):303-310.
[7]周泽华,吴向东,陈自洋,等.基于颜色形状识别和PnP算法的单目视觉轨道边坡位移检测方法[J].湘南学院学报,2023,44(2):37-41.
[8]谭立超.基于时间同步优化和特征筛选的无人机单目视觉惯导联合定位方法[J].武汉大学学报(工学版),2023,56(2):237-243.
猜你喜欢
科学(2022年4期)2022-10-25 02:43:18
探索科学(学术版)(2019年12期)2019-07-14 00:06:56
电子制作(2019年11期)2019-07-04 00:34:42
电子制作(2019年23期)2019-02-23 13:21:26
橡塑技术与装备(2018年21期)2018-11-13 01:36:00
电子制作(2018年9期)2018-08-04 03:31:10
电子测试(2018年9期)2018-06-26 06:46:10
电子测试(2018年11期)2018-06-26 05:56:00
电子制作(2018年2期)2018-04-18 07:13:47
电子测试(2015年18期)2016-01-14 01:22:55
