
永磁调速器主配电气中位整定技术分析与应用
2024-12-06 00:00:00俞凯
中国新技术新产品 2024年12期
关键词:调速器
摘 要:永磁调速器是一种新型的电力传动装置,在石油化工中得到了广泛应用。本文以静态和动态平衡理论为基础,探索出了主配电气中位自动诊断方法、自动整定方法、直接整定方法以及改进型直接整定方法等一系列明确主配频繁调节原因的技术方法。通过试验分析,得出了一系列关于主配电气中位整定技术的结论,可为石油化工中永磁调速器的应用提供理论和实践指导。
关键词:调速器;电气中位;主配频繁调节
中图分类号:TM 15" " " " " 文献标志码:A
石油化工不断发展对电力传动系统的要求也越来越高[1]。永磁调速器是一种先进的电力传动装置,具有体积小、效率高和响应快等优点,在石油化工中受到广泛关注[2]。而永磁调速器主配电气中位整定技术是其关键技术之一,对提高系统的稳定性和控制精度具有重要意义。
1 永磁调速器主配电气中位整定技术分析
1.1 中位整定原理
中位整定原理是指在永磁调速器主配电气系统中调整电力设备参数,使系统的运行能够达到最佳状态[3]。在永磁调速器中,中位整定原理通常是指根据电动机的负载情况和运行需求,调整电力设备的参数,以达到最佳工作效果。
主配动作死区是指在主配动作前、后导叶位置的变化范围,它对系统的响应时间和动态特性具有重要影响。当未进行主配动作死区测量时,M试验被设定为0。系统处于未进行试验的状态,主配动作死区测量也将被暂停。因此,M试验=0表示系统当前不进行主配动作死区测量。主配位置给定:M=M中+ΔY;开度死区:Y死区=Y开-Y关;主配死区范围:M关lt;0、M开gt;0;静态平衡条件下的比例阀阀芯位置:B0实际=B0平衡。
当系统处于静态平衡状态时,如果比例阀中位已经准确设定,就会进行主配动作死区测量,此时M会跟随M试验。如果比例阀中位没有准确设定,那么M=0。应确保系统在静态平衡状态下进行主配动作死区测量,从而保证系统的稳定性和可靠性。当M<M关时,Y开始减少;当M>M开时,Y开始增大。在M未准确整定的情况下,主配位置会偏离期望值,进而导致Y的数值发生变化。当M不在[M关,M开]时,系统的将不再按预期进行响应。因此,准确整定M是确保系统正常运行的重要一步。当系统的输出值Y偏离设定值Y给定,并且偏离程度超过Y死区时,系统会自动进行调整以使Y重新接近给定值。一旦Y重新回到给定值附近且偏离程度≤Y死区时,系统将再次处于静态平衡状态。这种自动调节能力有助于使系统保持稳定,并使系统在受到干扰或变化的情况下快速回到稳定状态。
1.2 中位自动诊断方法
通过传感器或监测设备需要采集主配位置给定值M给定和阀门开度给定值Y等变量参数,以获取系统当前的给定值。根据液压随动系统动态平衡理论,可通过比较主配位置给定值M给定和实际主配位置的偏移来判断系统是否处于动态平衡状态。如果主配电气中位偏移在设定的条件范围内,即符合判据条件,可认为系统处于动态平衡状态。如果主配电气中位偏移符合判据条件,说明系统处于动态平衡状态,诊断环节完成,进而进入自动整定环节,即根据动态平衡理论和自动控制算法调整系统的参数和控制策略,以实现最佳的动态平衡效果[4]。如果主配电气中位偏移不符合判据条件,即系统未达到动态平衡状态,需要重新采集主配位置给定值M和阀门开度给定值Y等变量参数,并重新进行参数采集。
综上所述,基于液压随动系统动态平衡理论的中位自动诊断方法可自动判定系统是否处于动态平衡状态,并在满足条件时进入自动整定环节,以实现系统的自动调节和优化。
1.3 主配电气中位自动整定
需要实时采集主配位置M和阀门开度Y等数据。通过传感器或监测设备,获取系统当前主配位置和阀门开度信息。根据液压随动系统动态平衡理论,当主配位置M的绝对值小于等于设定的稳定阈值ε时,判断主配位置M趋于稳定不变。此时,需要观察阀门开度Y的变化趋势[5]。如果阀门开度Y逐渐减少,说明系统没有达到最佳动态平衡状态。在此情况下,需要自动判断阀门开度Y开始不变和开始增大的临界点。如果阀门开度Y逐渐增大,同样说明系统还未达到最佳动态平衡状态。在这种情况下,需要自动判断阀门开度Y开始不变和开始减少的临界点。根据判断所得临界点信息,将主配位置(M关+M开)的平均值设为M中,即(M关+M开)/2。
1.4 主配电气中位改进型自动整定
需要采集阀门开度给定值Y和主配位置给定值M给定等变量参数。通过传感器或监测设备获取系统当前阀门开度和主配位置的给定值。应用液压随动系统动态平衡理论,通过计算Y给定的变化率得出调节周期。如果设定的阈值T大于主配调节周期,并且主配位置给定值M给定是朝关的方向调节时,就需要比较主配位置给定值M给定的调节周期与阈值T'的大小。
综上所述,主配电气中位改进型自动整定方法可根据调速器电控程序中的调节周期和阀门开度的变化趋势自动调整主配位置的中位值,并进行比例阀电气中位漂移的自动诊断,以实现系统的自动整定和优化。
1.5 主配电气中位直接整定
需要根据主配机械中位的初设值设定调速器主配电气中位。采集主配位置给定值M给定和阀门开度给定值Y等变量参数。通过传感器或监测设备获取系统当前主配位置和阀门开度的给定值。通过计算M给定的变化率得出调节周期。比较主配位置给定值M给定的调节周期与阈值T'的大小。首次发现M给定的周期小于设定的阈值T'时,将此时M中的值记为M1。
综上所述,主配电气中位直接整定方法直接根据主配机械中位的初设值和调速器电控程序中的调节周期,通过逐步调整主配位置的值实现自动定位,并完成整定过程,无须进行主配中位诊断,简化了整定流程。
1.6 主配电气中位改进型直接整定方法
需要根据主配机械中位的初设值设定调速器主配电气中位。采集主配位置给定值M和阀门开度给定值Y等变量参数。通过传感器或监测设备,获取系统当前主配位置和阀门开度的给定值。通过计算M给定的变化率得出调节周期。需要比较主配位置给定值M给定的调节周期与阈值T'的大小。首次发现M给定的周期大于设定的阈值T'时,将此时M中的值记为M2。根据记录得到的M1和M2的值,将主配位置M中记为(M1+M2)/2。
综上所述,主配电气中位改进型直接整定方法根据主配机械中位的初设值和调速器电控程序中的调节周期,快速增加和减少主配位置的值,并记录首次满足条件的值,最终取2次记录值的平均值,实现自动定位和整定过程。这种改进型方法能够更快速地找到合适的主配中位值,提高整定效率。
2 应用测试
2.1 试验过程
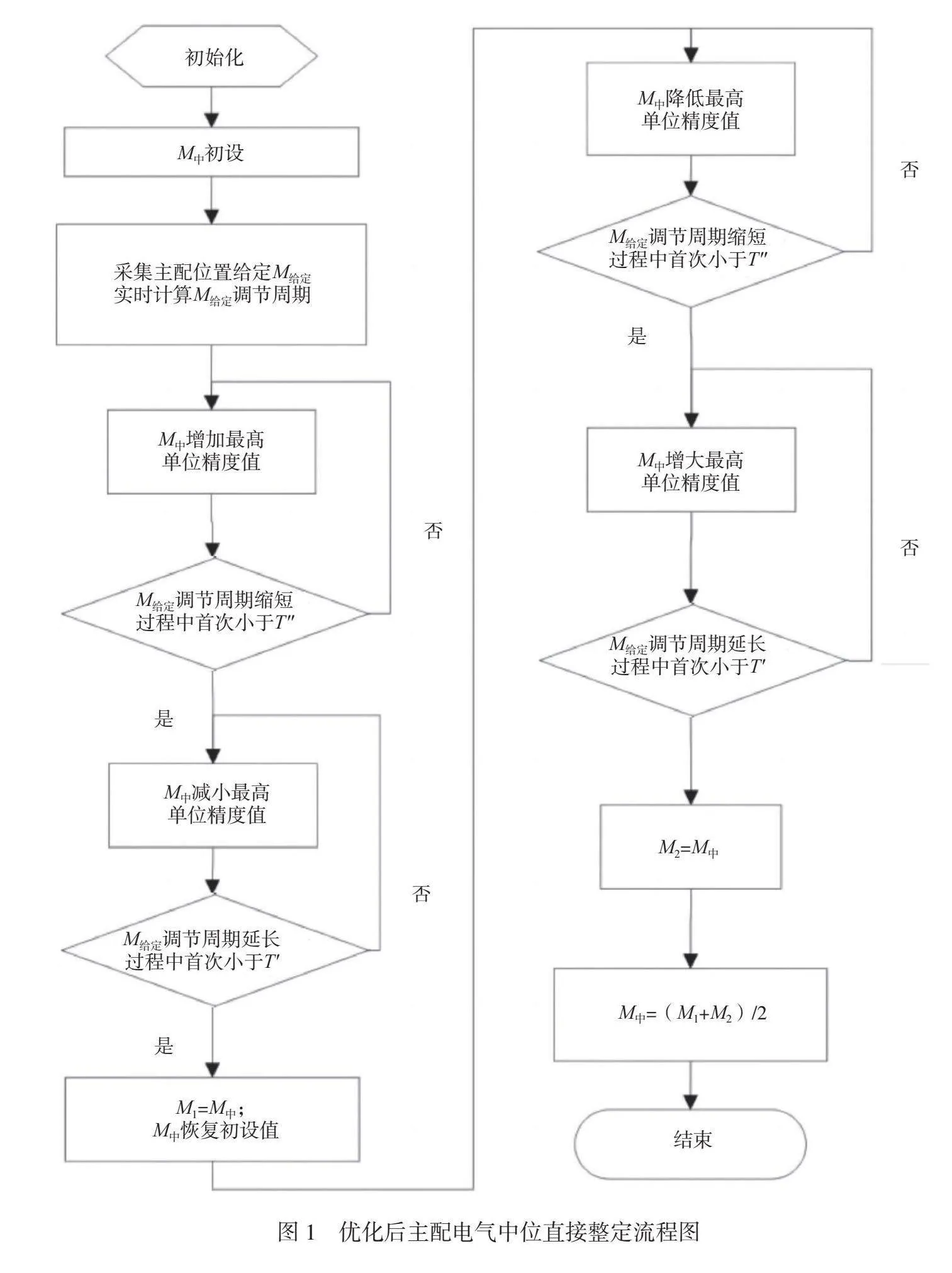
优化后的主配电气中位直接整定流程如图1所示。首先,确定M给定的调节周期为T',M的变化是周期性的。其次,通过主配位置反馈的方式来确定M1和M2。主配位置反馈是一种控制策略,根据系统的输出和期望输出间的差异来调整控制参数。在这种情况下,使用主配位置反馈来调整M1和M2的取值。为了保持对称性,要求M1和M2互为反向。当M1增加时,M2减少,反之亦然。通过这种对称性的要求,更好地适应Y变化的趋势。最后,将M1和M2的中间值作为M的取值,平衡M的变化,使其更稳定、可靠。通过取中间值,缩小M的波动范围,提高系统的控制性能。
将导叶开度开至40%,模拟机组在并网负载态下的工况。再强制输入机组转速为50Hz的信号,进行试验。该试验旨在模拟机组在特定负载条件下的运行情况,并对液压随动系统的参数进行调整和优化,以达到使系统稳定运行的目的。
2.2 试验分析
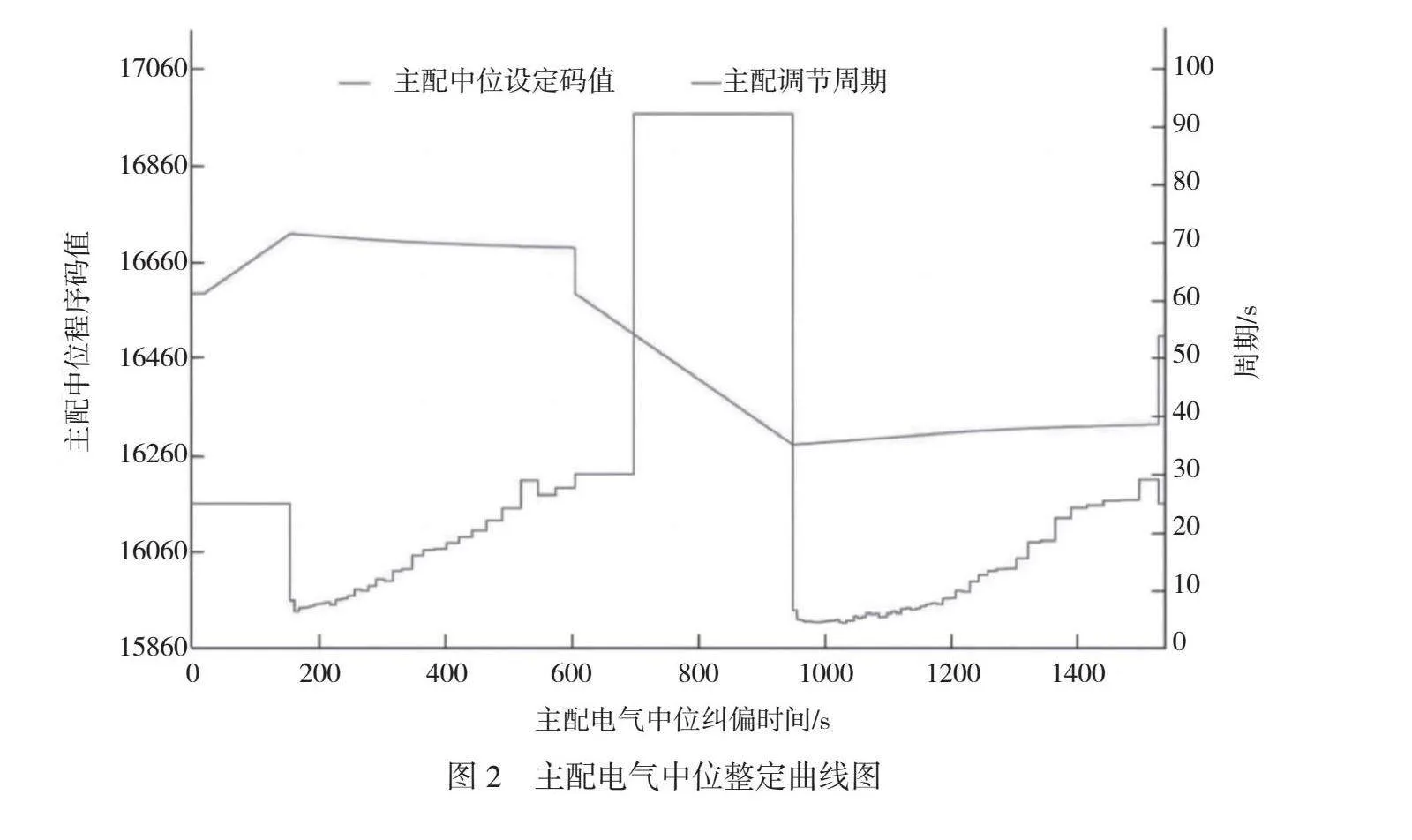
将导叶开度开至40%,以模拟机组并网负载态。强制输入机组转速为50Hz的信号,并保持开度给定值稳定不变。然后根据主配机械中位的设定值,将主配电气中位设定为16595。在试验过程中,将M中的调整周期初始阶段设为1s。在整定过程中,M的给定调节周期小于T'。试验开始后,观察到M中曲线以红色显示。控制比例阀中位,以调整机组的运行状态。切换为电手动运行方式,并将比例阀、主配和接力器作为执行机构,准确设定比例阀的中位位置。通过调整M中的调整周期,观察到M中曲线的变化。
主配电气中位整定曲线如图2所示,从第19.1s开始,主配位置M逐渐增加。在第154.7s,将主配位置M以主配调节周期为周期,以1个码值为步长逐渐减少,这样做的目的是逐渐接近理想状态。在第949.9s,再次检测到阈值T'大于主配调节周期。根据设定,将主配位置M以主配调节周期为周期,以1个码值为步长逐渐增加,这样做是为了进一步优化主配位置M的值。同时,在整个过程中,还实时计算了主配调节周期,确定调整的速度和步长,以便更好地控制主配位置M的变化。最终,在第1527.7s,阈值T’开始小于主配调节周期。此时,将M的值记为M2,值为16324。分析试验结果可以发现,主配位置M的调整周期越长,得到的整定结果越精准。原因是较长的调整周期允许系统更充分地适应变化,从而得到更准确的结果。整个整定过程在1527.7s结束,最终得到的主配电气中位的整定计算结果为16506。根据这个结果可以认为主配位置M已经调整到一个较理想的状态,整定过程完成。
3 结语
本文对永磁调速器主配电气中位整定技术进行了深入研究和实际应用,得出了一系列关于该技术的重要结论,为石油化工中永磁调速器的应用提供了理论和实践指导。未来将进一步对该技术进行深化研究,不断提高其在石油化工中的应用效果,推动石油化工电力传动技术的创新与发展,为石油化工的可持续发展贡献力量。
参考文献
[1]吕虎林,武飞宏,张佳玮.调速器主配压阀中位监测和整定控制策略分析[J].电力设备管理,2022(增刊2):20-22.
[2]路韬.永磁调速器的安装调试与试验研究[J].机械工程与自动化,2023(3):178-180.
[3]韩俊杰,宋超,任乐天,等.基于改进滑模的永磁同步电机控制[J].北华大学学报:自然科学版,2023,24(6):828-834.
[4]范欣.盘式异步永磁调速器结构设计分析[J].江苏科技信息,2022, 39(29):60-63.
[5]吴立明,纪龙.变频器调速技术在电气自动化控制中的应用探研[J].中文科技期刊数据库(全文版)工程技术,2023(8):22-25.
猜你喜欢
大电机技术(2021年3期)2021-07-16 05:38:34
消费导刊(2017年24期)2018-01-31 01:28:32
山东工业技术(2016年15期)2016-12-01 05:31:54
魅力中国(2016年7期)2016-05-14 23:38:15
水电站机电技术(2016年1期)2016-02-28 14:21:36
中国机械工程(2015年13期)2015-12-16 12:25:36
合成技术及应用(2015年3期)2015-12-11 08:36:27
水电站机电技术(2014年4期)2014-10-13 08:30:03
水电站机电技术(2014年3期)2014-09-26 12:01:22
水电站机电技术(2014年3期)2014-09-26 12:01:17
